A tradução desta página foi concluída por tradução automática. Por favor, perdoe quaisquer possíveis erros.

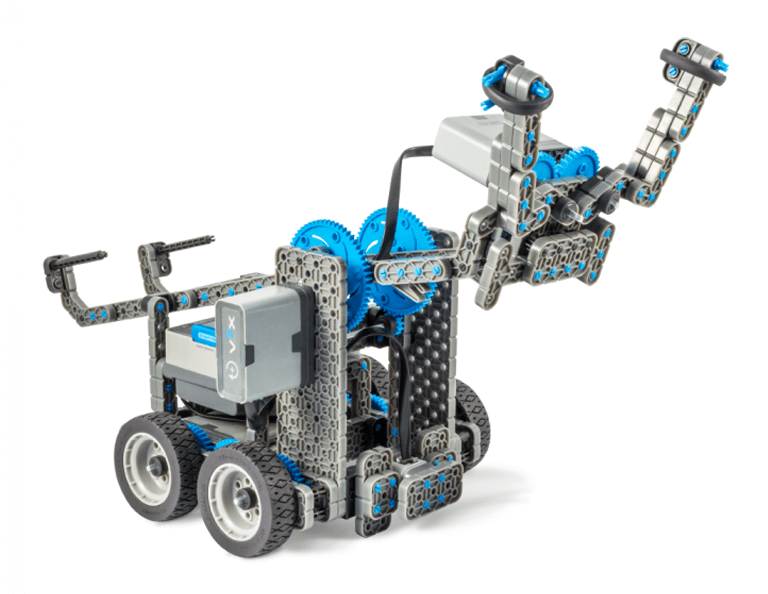
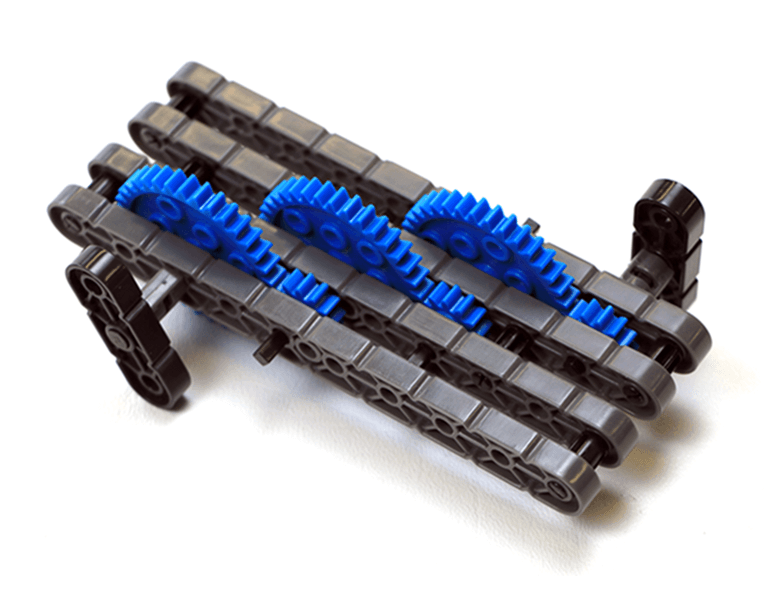
Agarrador
0 Lições
Construa um dispositivo que use articulações em tesoura para converter a direção do movimento e explore a mecânica de uma articulação em tesoura.
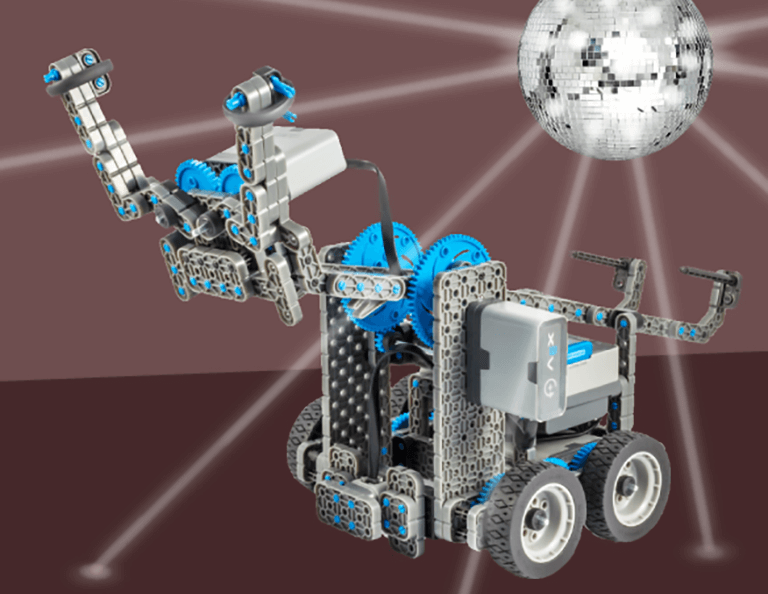
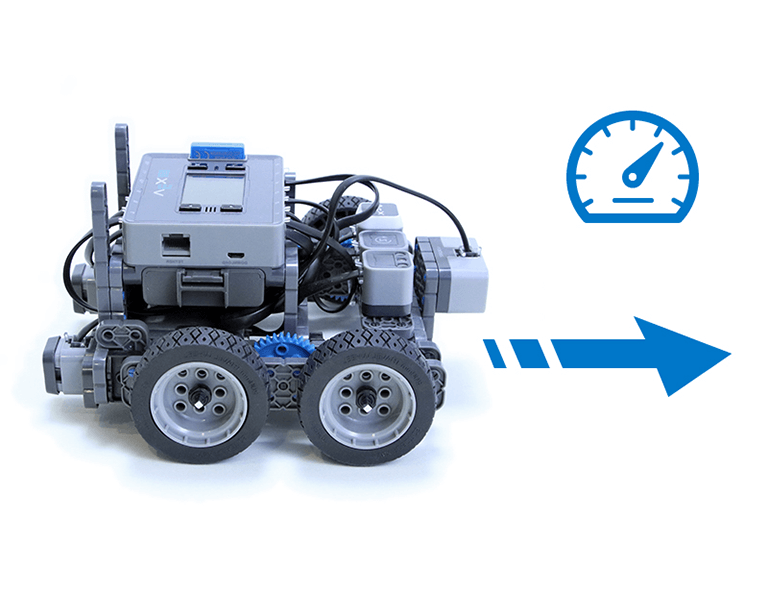
LOUCO Caixa
0 Lições
Explore como as vantagens mecânicas do torque e da velocidade estão relacionadas às relações de transmissão.
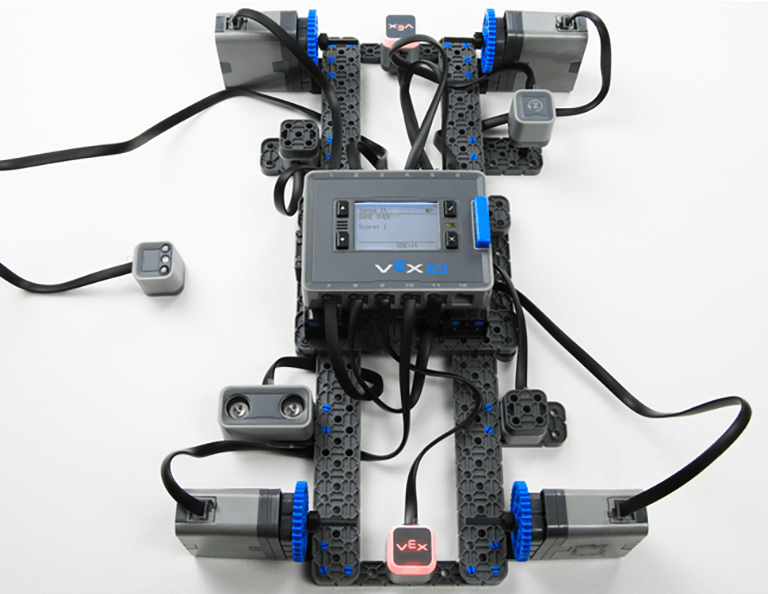
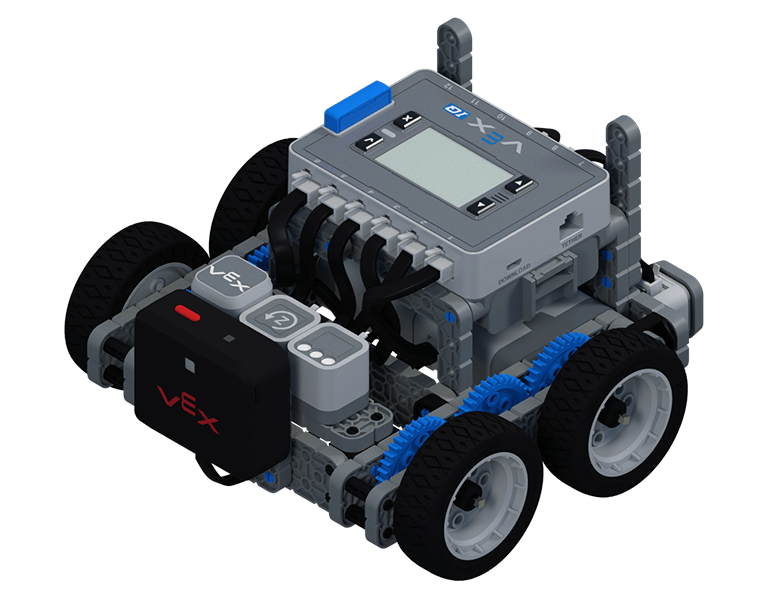
Testbed - Sensores VEX IQ
0 Lições
Construa um Testbed para investigar como os sensores VEX IQ funcionam e participe do Sense It Challenge!
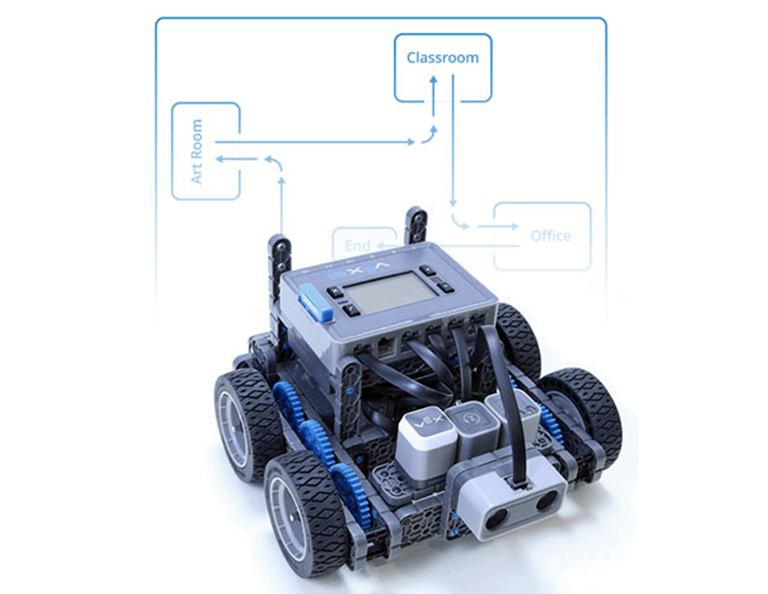
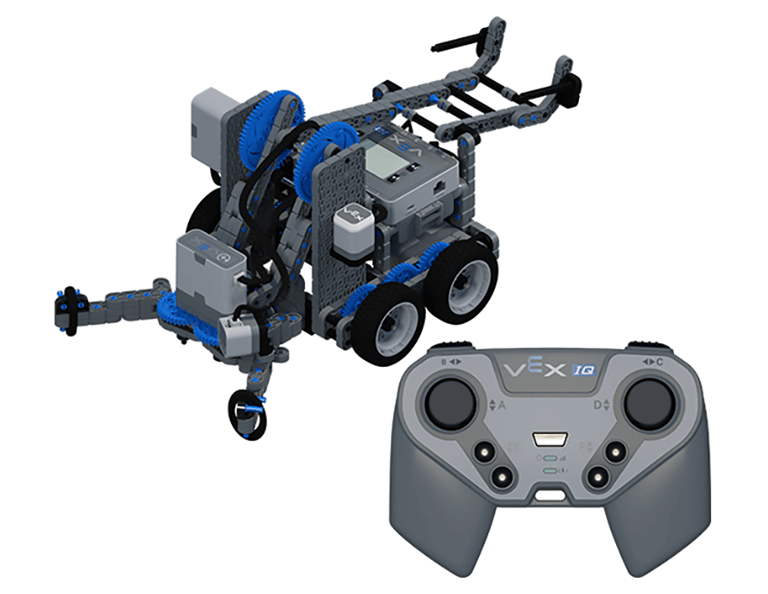
Fazer ou não fazer
0 Lições
Programe seu robô para agir de acordo com condicionais e criar uma interface de usuário (IU).