Futebol Robô
4 Lições
Nesta unidade, irás explorar como criar um manipulador no teu robô para agarrar, passar e marcar mais golos como jogador de futebol robô na competição Robot Soccer!
Visite o Portal do Professor para materiais de apoio ao professor e vídeos sobre o conteúdo e facilitação das Lições de Futebol de Robô.
Lição 1: Introdução
Nesta lição, você criará o Clawbot, carregará o controlador e a bateria e se preparará para programar.

Lição 2: Manipuladores
Nesta lição, você aprenderá sobre manipuladores passivos e ativos e design de entrada, a fim de iterar o design do seu robô e competir em um desafio individual de futebol com robôs!
Lição 3: Competição de Futebol de Robôs
Nesta lição, você aplicará seu aprendizado da lição anterior para competir na competição Robot Soccer!

Lição 4: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM ligada.

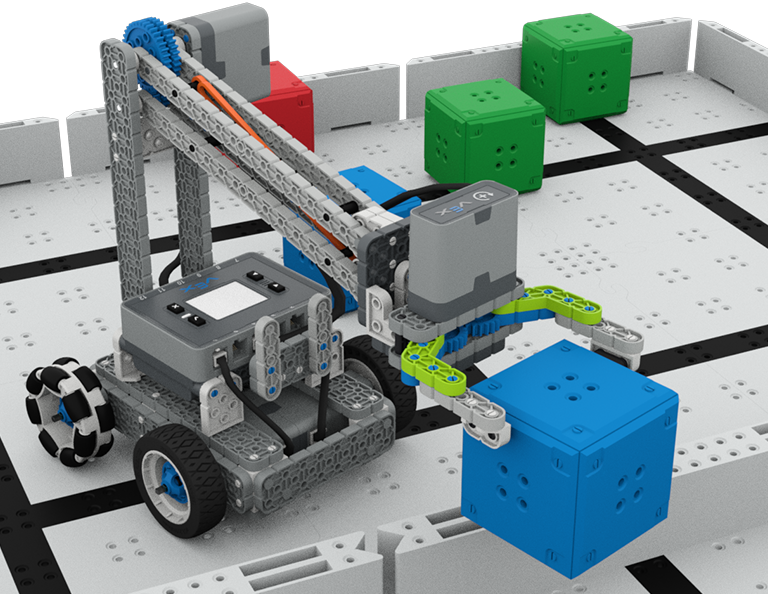
Para cima e para cima
6 Lições
Nesta unidade, você explorará como projetar um Clawbot para coletar, pegar e mover cubos de um lado a outro do campo, na competição Up and Over!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das aulas Up and Over.

Lição 1: Introdução
Nesta Lição, você será apresentado à competição Up and Over, configurará a Bateria e o Controlador, preparar-se-á para codificar e construirá o Clawbot.
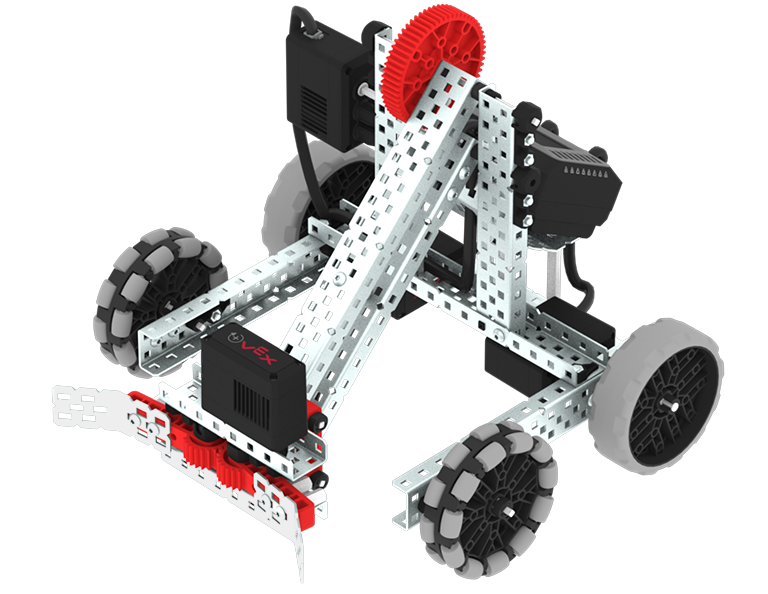
Lição 2: Design de Garras
Nesta lição, você aprenderá o que é uma garra, como uma garra eficaz funciona e como o reconhecimento pode beneficiar os designs e a estratégia da sua equipe. Em seguida, você aplicará o que aprendeu no desafio Grab and Go.
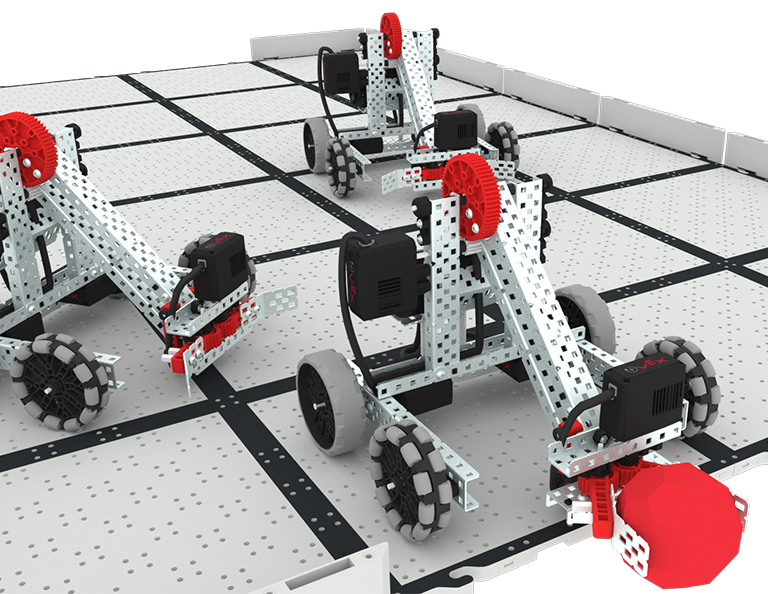
Lição 3: Desenhos de Braços
Nesta lição, você aprenderá sobre diferentes elementos dos braços robóticos, como eles funcionam e o que torna um design de braço eficaz, a fim de empilhar o máximo de cubos possível em um minuto no desafio Stacked Up.
Lição 4: Grupos Motores
Nesta lição, você aprenderá o que são grupos motores, como eles podem ser úteis e como configurar grupos motores no VEXcode IQ para iterar no seu robô para concluir o desafio Up and Over.
Lição 5: Acima e acima da concorrência
Nesta lição, você aplicará seu aprendizado das lições anteriores para competir na competição Up and Over!

Lição 6: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM.
Futebol Robô
4 Lições
Nesta unidade, você explorará como criar um manipulador em seu robô para agarrar, passar e marcar mais gols como um jogador de futebol robô na competição Robot Soccer!
Visite o Portal do Professor para materiais de apoio ao professor e vídeos sobre o conteúdo e facilitação das Lições de Futebol de Robô.
Lição 1: Introdução
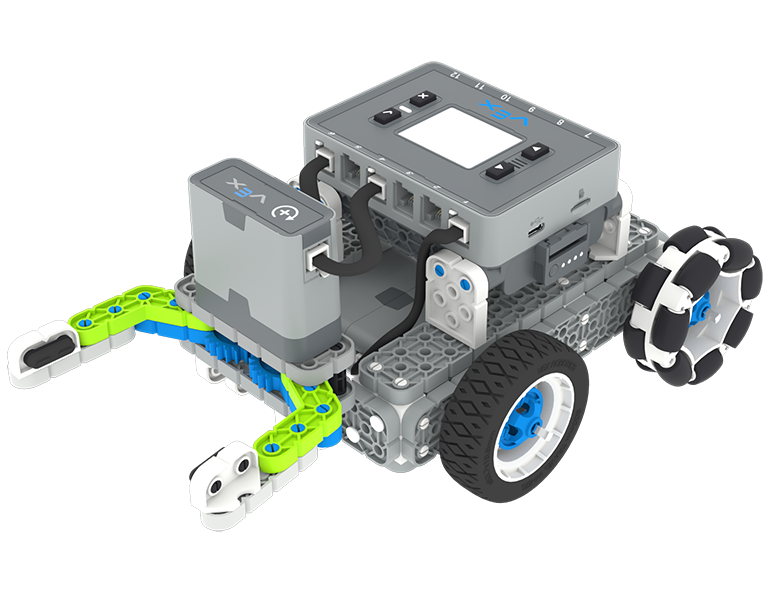
Nesta Lição, você construirá o Clawbot Simples, carregará seu Controlador e Bateria e se preparará para codificar.
Lição 2: Manipuladores
Nesta lição, você aprenderá sobre manipuladores passivos e ativos e design de admissão, a fim de iterar no design do seu robô e competir em um desafio de futebol de robô individual!
Lição 3: Competição de Futebol de Robôs
Nesta lição, você aplicará seu aprendizado da lição anterior para competir na competição Robot Soccer!
Lição 4: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM ligada.

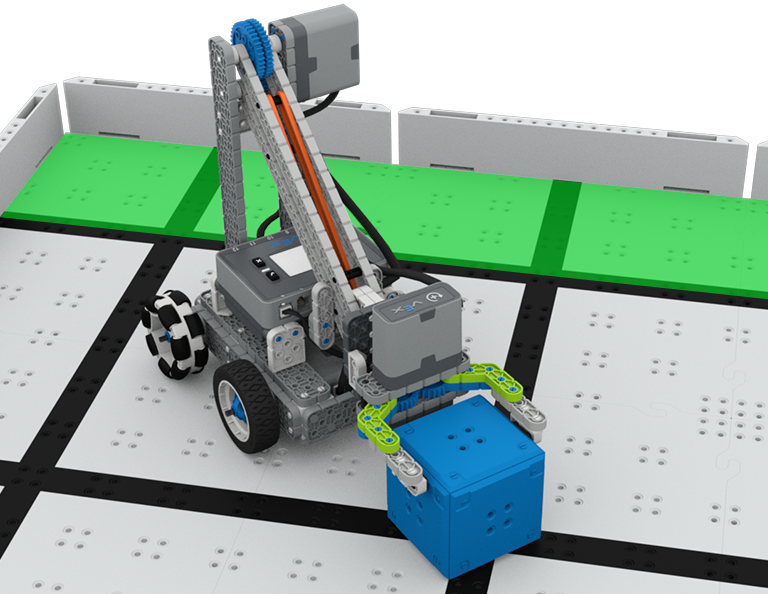
Colecionador de Cubos
6 Lições
Nesta unidade, você explorará a diferença entre controle de motorista e desafios autônomos, enquanto aprende a dirigir o Clawbot e codificá-lo para classificar e empilhar cubos na competição Cube Collector!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das Lições do Coletor de Cubos.
Lição 1: Introdução
Nesta lição, você será apresentado à competição Cube Collector, criará o Clawbot e se preparará para programar.

Lição 2: Controlo do Condutor
Nesta lição, você aprenderá sobre como usar o programa Driver Control no IQ Brain para que possa conduzir o Clawbot para empilhar e marcar cubos no campo e participar do Speed Stack Challenge.

Lição 3: Codificação para Movimentos Autônomos
Nesta lição, aprenderá a codificar o seu robô para movimentos autónomos, incluindo como planear o caminho do seu robô. Em seguida, você criará um projeto VEXcode IQ para pontuar e empilhar cubos no desafio autônomo Coding for Cubes.

Lição 4: Usando Múltiplos Programas (Autônomo e Motorista)
Nesta lição, aprenderá sobre como personalizar os controlos do condutor e como pode usar o Controller e o VEXcode IQ para otimizar a sua estratégia de condutor para competir num desafio com o controlo do condutor e corridas autónomas.

Lição 5: Competição de Coletores de Cubo
Nesta lição, você aplicará seu aprendizado das lições anteriores para competir na competição Cube Collector!

Lição 6: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM relacionada.

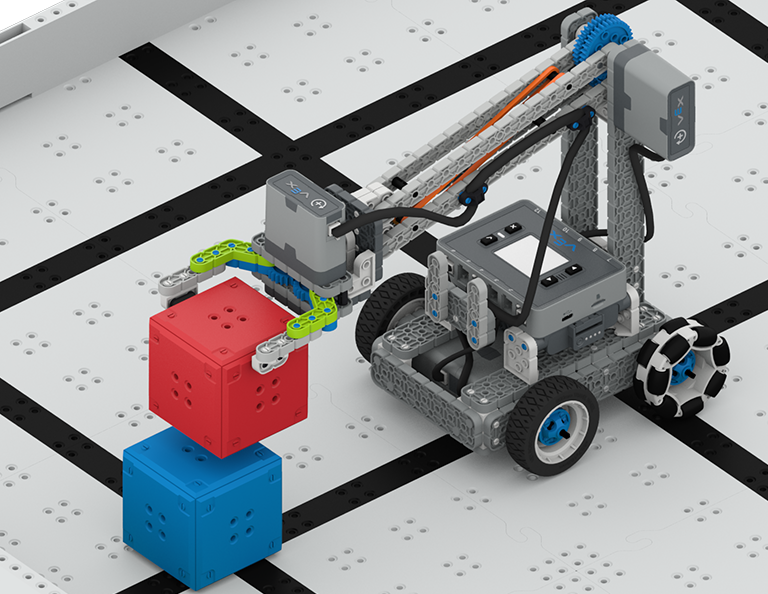
Destruidor de Castelo
6 Lições
Nesta unidade, você explorará como usar os sensores ópticos e de distância para procurar, colidir e limpar 'castelos' de cubos para marcar pontos na competição Castle Crasher!
Visite o Portal do Professor para materiais de apoio ao professor e vídeos sobre o conteúdo e facilitação das Lições do Castle Crasher.

Lição 1: Introdução
Nesta Lição, você será apresentado à Competição Castle Crasher, construirá o BaseBot e se preparará para programar.

Lição 2: Castle Crasher Sem Sensores
Nesta lição, você aprenderá sobre como calcular ângulos e alterar a velocidade do seu robô para poder competir no Desafio Tower Over.

Lição 3: Castle Crasher + Sensor de Distância
Nesta lição, você aprenderá sobre o que é o sensor de distância e como ele pode ser usado no seu robô. Você também aprenderá sobre o bloco [Wait until] e como ele pode ser usado em um projeto VEXcode IQ. Então você aplicará o que aprendeu para competir no Cube Crasher Challenge!

Lição 4: Criando Algoritmos
Nesta lição, você aprenderá sobre o sensor óptico e sobre como criar um algoritmo que usa o feedback do sensor. Em seguida, você codificará seu robô para encontrar cubos de forma autônoma e empurrá-los para fora do Campo no Desafio Varrer o Campo.

Lição 5: Competição Castle Crasher
Nesta Lição, você aplicará o seu aprendizado das Lições anteriores para competir numa competição Castle Crasher!
Lição 6: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM.
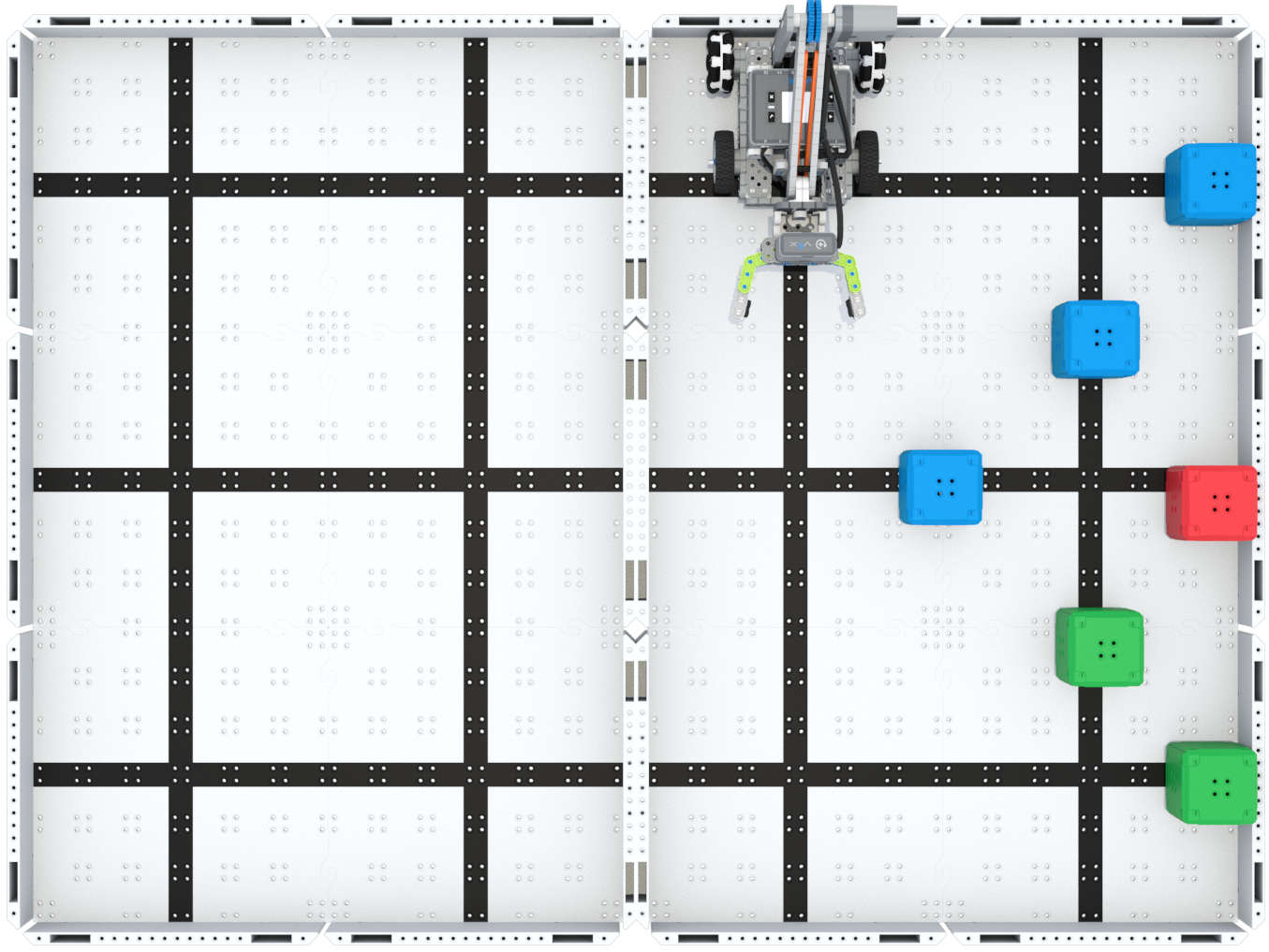
Caça ao tesouro
5 Lições
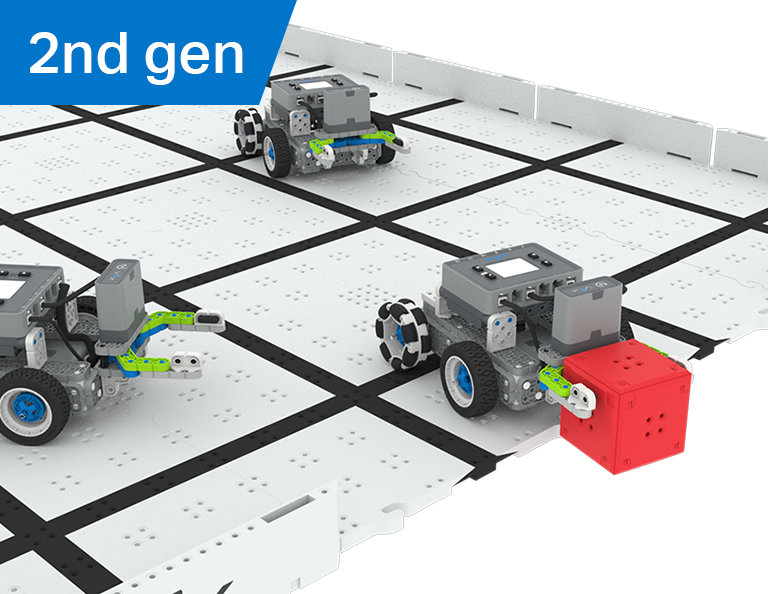
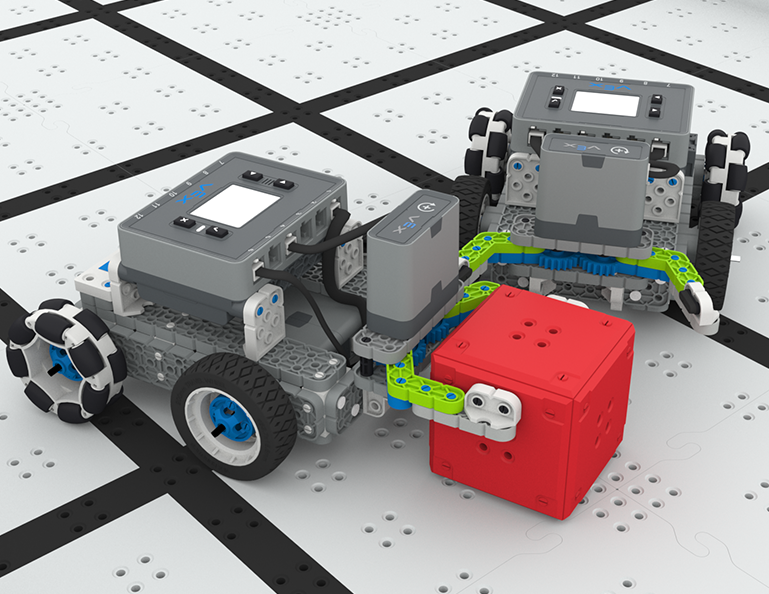
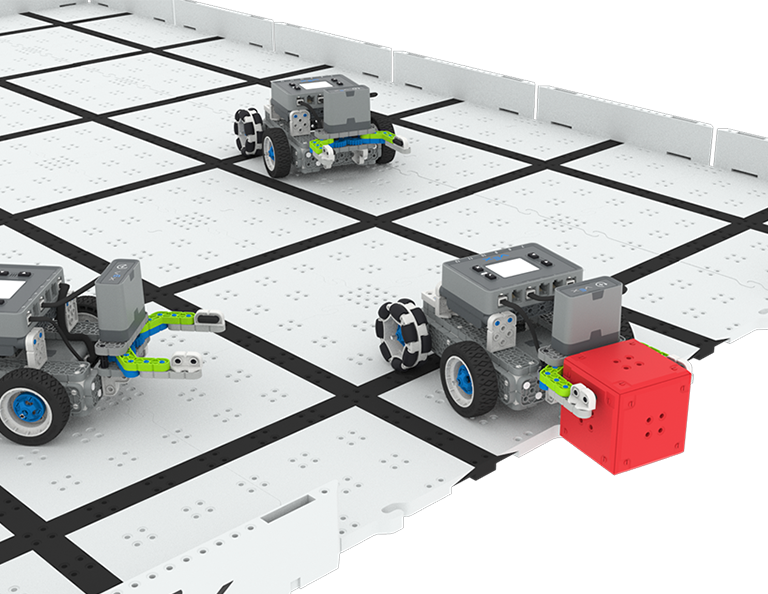
Nesta Unidade, você construirá e codificará o Simple Clawbot com o Sensor Óptico para reconhecer e coletar cubos vermelhos para competir na competição Treasure Hunt!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das Lições de Caça ao Tesouro.
Lição 1: Introdução
Você será apresentado à competição Caça ao Tesouro, construirá o Robô Garra Simples e se preparará para programar.
Lição 2: Garra sem sensor
Nesta lição, você aprenderá sobre o uso de blocos Drivetrain e Motion no VEXcode IQ para codificar seu Clawbot Simples para coletar e mover cubos no desafio Clawbot Collector.
Lição 3: Garra com Sensor
Nesta Lição, você aprenderá a codificar o Sensor Óptico para detectar, coletar e mover um cubo vermelho no desafio Movimentador de Tesouros!
Lição 4: Competição de Caça ao Tesouro
Nesta Lição, você aplicará o aprendizado das Lições anteriores para competir numa competição de Caça ao Tesouro!
Lição 5: Conclusão
Nesta Lição, irá refletir sobre a Unidade e identificar ligações entre o que fez e uma carreira STEM.
Cabo-de-guerra
6 Lições
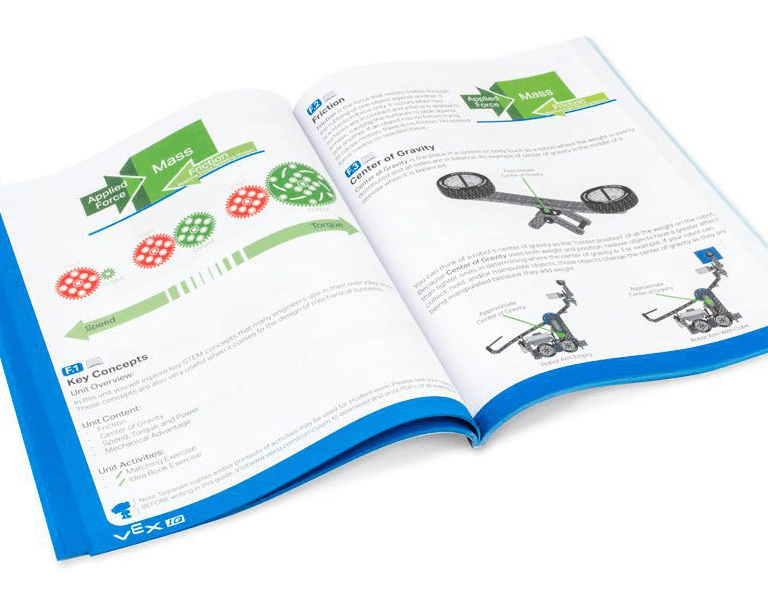
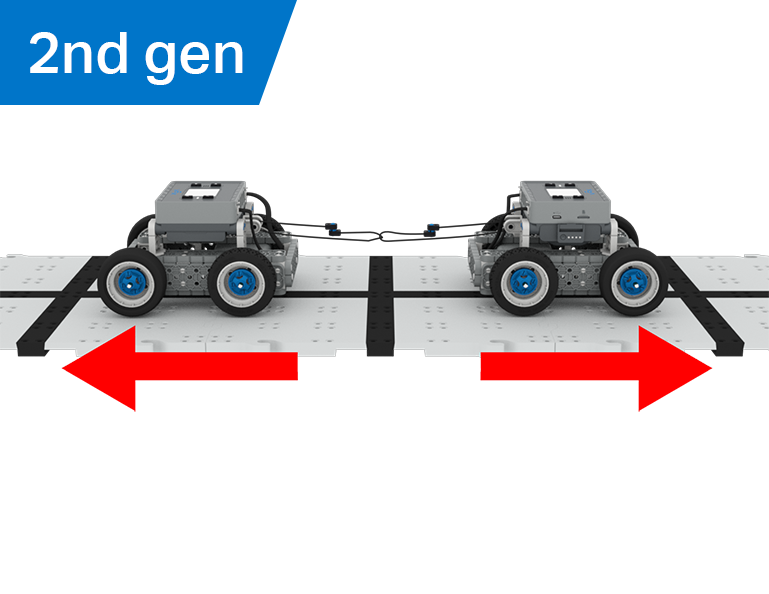
Nesta unidade, você explorará como a vantagem mecânica e o centro de massa afetam a capacidade do BaseBot de puxar objetos e projetará o melhor robô para o jogo Tug of War!
Visite o Portal do Professor para obter materiais de apoio ao professor e vídeos sobre o conteúdo e a facilitação das Lições de Cabo de Guerra.
Lição 1: Introdução
Nesta Lição, você será apresentado à competição Cabo de Guerra e construirá o BaseBot.
Lição 2: Puxando Objetos com o BaseBot
Nesta lição, você criará um acessório de corda para praticar a puxar objetos com o seu BaseBot. Em seguida, competirá num desafio Robot Tractor Pull.

Lição 3: Usando um Trem de Engrenagem
Nesta lição, você adicionará um trem de engrenagem ao seu BaseBot para explorar como diferentes configurações de engrenagem afetam a capacidade do seu robô de puxar um objeto. Em seguida, você competirá num desafio de tração de trator de trem de engrenagens.
Lição 4: Adicionar Missa
Nesta lição, você adicionará massa ao seu BaseBot para explorar como a alteração do centro de massa afeta a capacidade do seu robô de puxar um objeto. Então você competirá num desafio de cabo de guerra.
Lição 5: Competição de cabo de guerra
Nesta Lição, você aplicará seu aprendizado das Lições anteriores para competir numa competição de Cabo de Guerra!
Lição 6: Conclusão
Nesta Lição, irá refletir sobre a sua aprendizagem nesta Unidade e identificar ligações entre o que fez e uma carreira STEM.