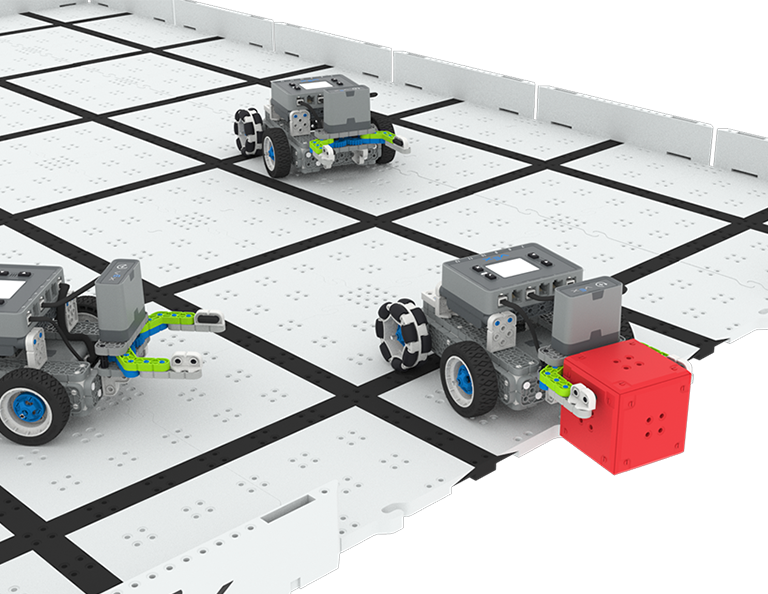
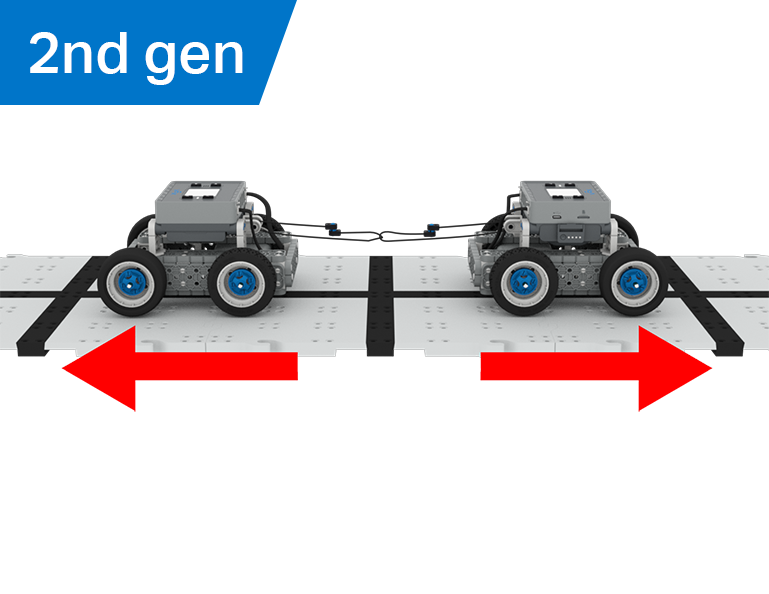
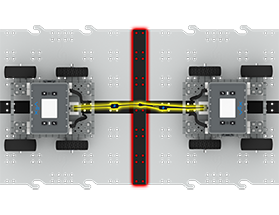
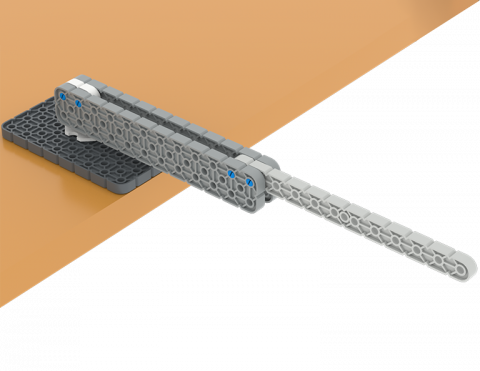
คุณสามารถสร้างอุปกรณ์ที่แขวนไว้บนโต๊ะได้หรือไม่?
Activity Link
https://docs.google.com/document/d/1rnpQ1VDEIH3lhpHp8fl-YybA034D73LZIz_rRy6mufc/edit
Activity Image
Image
VEX Platform
Subject
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Hang Out.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Hang Out.docx