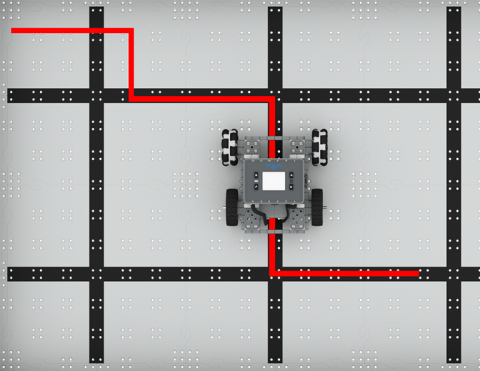
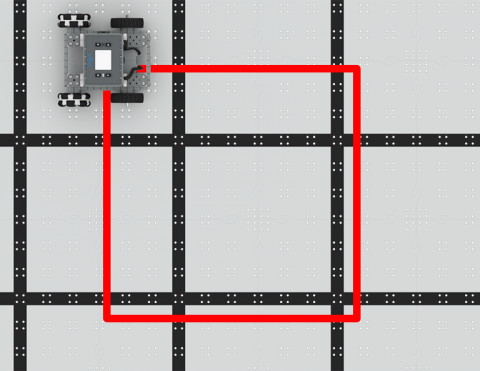
Naprogramujte BaseBota tak, aby řídil čtverec!
Activity Link
https://docs.google.com/document/d/1PjJcdqFEAzUDXEQZArGBQu-TdBLhjo275H8JN1Bv5os/edit#
Activity Image
Image
VEX Platform
Subject
Builds
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Square Dance.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Square Dance.docx
Activity Image Alt
Pohled shora dolů na robota IQ BaseBot na poli IQ Field, jak jede po vyznačeném čtvercovém tvaru.