
Bersiap untuk Mengemudi
Pada Unit ini, siswa akan mengendarai robot mereka menggunakan Tab Drive di VEXcode GO. Untuk bersiap mengemudi, siswa harus terlebih dahulu menghubungkan Brain ke VEXcode GO. Kemudian, mereka dapat menggunakan Tab Drive untuk mengatur mode berkendara yang mereka sukai, dan mengonfigurasi kontrol motor untuk mengoperasikan pemasangan lengan. Gunakan Video Tutorial berikut untuk membantu siswa bersiap mengemudi dan mengumpulkan objek di Pelajaran berikutnya.
Untuk mengakses tutorial, pilih ikon 'Tutorial' di Toolbar VEXcode GO, seperti yang ditunjukkan di sini.

Menghubungkan ke Robot Anda
Tonton video Tutorial 'Menghubungkan ke Robot Anda' dan ikuti langkah-langkah untuk menghubungkan Brain ke VEXcode GO.
Pastikan Baterai dan Otak terhubung dan Otak menyala.
Mengemudi dengan Kontrol Jarak Jauh
Setelah robot terhubung, siswa dapat menggunakan Tab Drive di VEXcode GO untuk mengendalikan robot mereka dari jarak jauh.
Tonton Video Tutorial 'Remote Control' dan ikuti langkah-langkahnya untuk mulai mengemudi.
Catatan: Pilih opsi 'Motor' di Port 3 untuk mengendalikan lengan dari jarak jauh di Tab Drive.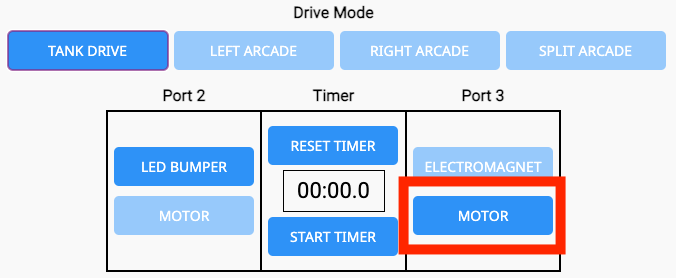

Apa selanjutnya?
Dalam Pelajaran ini Anda membangun Robot Pahlawan dan bersiap untuk mengendarai robot Anda di Lapangan.
Pada Pelajaran berikutnya Anda akan:
- Pelajari cara mengumpulkan sampel dan menyelamatkan penjelajah yang terjebak di pasir
- Berlatihlah mengendarai Robot Pahlawan Anda untuk memindahkan objek keluar dari kawah
- Bersainglah dalam Tantangan Koleksi Kawah!

Pilih< Kembali ke Pelajaranuntuk kembali ke Ikhtisar Pelajaran.
PilihPelajaran Berikutnya >untuk melanjutkan ke Pelajaran 2, untuk mempelajari cara mengumpulkan objek dari kawah di Tahap 1 Ekspedisi Matematika Mars!