
운전 준비하기
이 단원에서 학생들은 VEXcode GO의 Drive 탭을 사용하여 로봇을 운전합니다. 운전을 준비하려면 학생들은 먼저 Brain을 VEXcode GO에 연결해야 합니다. 그런 다음 드라이브 탭을 사용하여 원하는 드라이브 모드를 설정하고 모터 제어를 구성하여 팔 부착물을 작동할 수 있습니다. 다음 튜토리얼 영상을 활용하여 학생들이 다음 수업에서 운전하고 물건을 모으는 데 도움을 주세요.
튜토리얼에 액세스하려면 여기에 표시된 대로 VEXcode GO 도구 모음에서 '튜토리얼' 아이콘을 선택하세요.

로봇에 연결하기
'로봇에 연결하기' 튜토리얼 비디오를 보고 단계에 따라 Brain을 VEXcode GO에 연결하세요.
배터리와 브레인이 연결되어 있고, 브레인의 전원이 켜져 있는지 확인하세요.
원격 제어 운전
로봇이 연결되면 학생들은 VEXcode GO의 드라이브 탭을 사용하여 로봇을 원격으로 제어할 수 있습니다.
'원격 제어' 튜토리얼 비디오를 보고 단계에 따라 운전을 시작하세요.
참고: 드라이브 탭에서 팔을 원격으로 제어하려면 포트 3에서 '모터' 옵션을 선택하세요.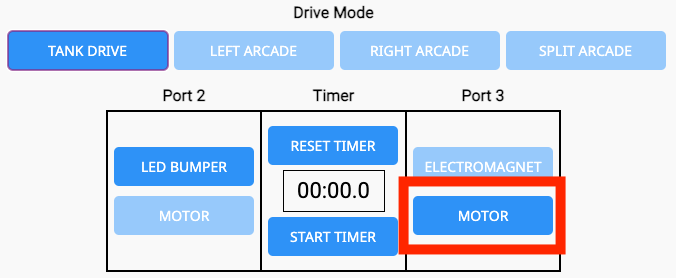

다음은 무엇인가?
이번 수업에서는 히어로 로봇을 만들고 현장에서 로봇을 운전할 준비를 했습니다.
다음 수업에서는 다음을 학습합니다.
- 모래에 갇힌 로버를 구출하고 샘플을 수집하는 방법에 대해 알아보세요.
- 영웅 로봇을 운전하여 분화구에서 물체를 옮기는 연습을 하세요.
- 크레이터 컬렉션 챌린지에 참여하세요!

< 수업 개요로 돌아가려면 수업로 돌아가기를 선택하세요.
다음 수업 >선택하여 수업 2로 넘어가서 화성 수학 탐사 1단계에서 분화구에서 물체를 수집하는 방법에 대해 알아보세요!