
Pozadí
Jednotka Mars Rover: Povrchové operace seznámí vás a vaše studenty s vytvářením projektů VEXcode GO pro řešení problému. Činnost roveru Perseverance a mise Mars 2020 slouží jako inspirace pro výzvy, které budou studenti řešit pomocí VEXcode GO a Code Base. Projekty, které vytvoří, bude nutné správně seřadit, aby se vzorky shromáždily a „uložily“.
Mise NASA Mars 2020
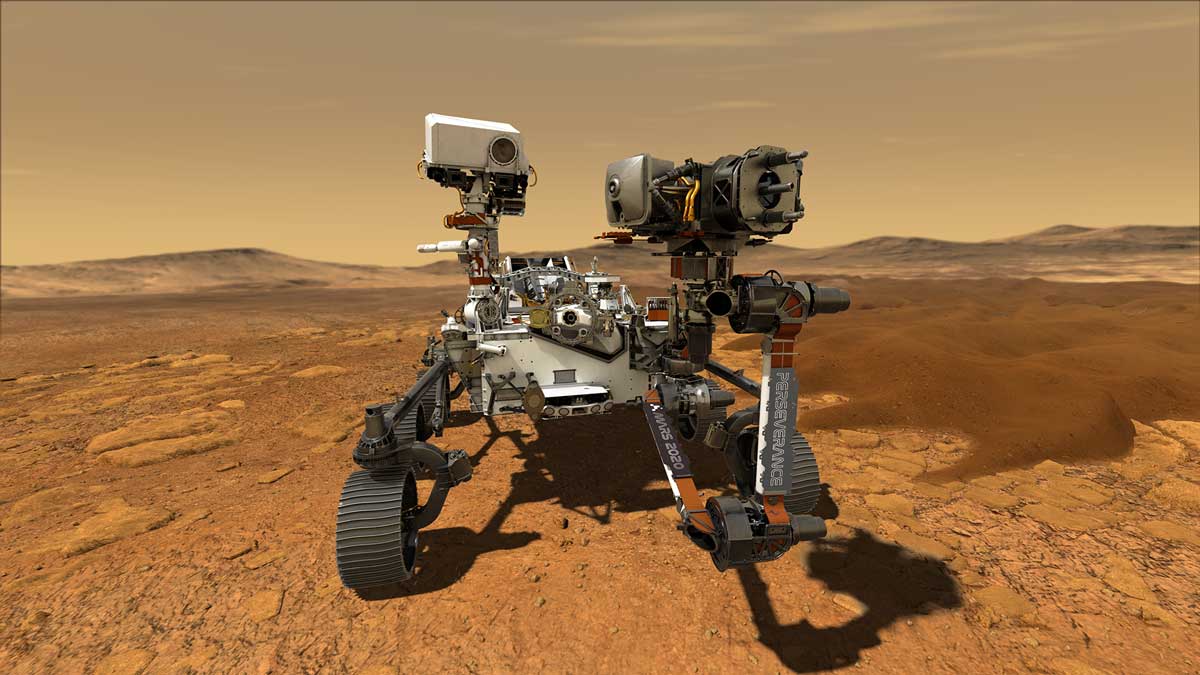
Mise NASA Mars 2020 se zaměřuje na vysoce prioritní vědecké cíle pro výzkum Marsu: život, klima, geologii a lidstvo. Rover Perseverance bude provádět povrchové operace, aby shromáždil data, která pomohou informovat o výzkumu rudé planety.
Co je to rover?
Rover je zařízení určené k pohybu po pevném povrchu planety nebo jiného nebeského tělesa (například Měsíce). Některé rovery jsou navrženy k přepravě členů vesmírné posádky, zatímco jiné jsou částečně nebo plně autonomní roboti. Tito roboti mají obecně za úkol shromažďovat informace o terénu a odebírat vzorky hornin, nečistot, půdy nebo dokonce kapalin.
Co jsou to povrchové operace?
Povrchové operace jsou vědecké studie, které bude rover na Marsu provádět. Všechny se zaměřují na vyhledávání, sběr a ukládání geologických vzorků. Pro začátek bude Perseverance hledat poutavé kameny. Hornina by mohla být považována za zajímavou, pokud má možnost zachovat chemické stopy starověkého života nebo být pozměněna prostředím, které podporovalo mikrobiální život.
Po identifikaci zajímavých hornin Perseverance odvrtá vzorek, umístí ho do uzavřené zkumavky a uloží ho na povrch. Ukládání vzorků do mezipaměti, které se během této mise používá, spočívá v tom, že je na stejném místě ponecháno nebo zakopáno více vzorků. Budoucí mise pak bude schopna tyto vzorky získat a všechny je dohromady vrátit vědcům na Zemi.
Co je to sekvence?
Sekvence je specifické pořadí, ve kterém jsou chování prováděna. Akce nebo událost vede k další seřazené akci v posloupnosti. Sekvence je důležitá pro kódovou základnu, protože robot se bude pohybovat přesně tak, jak mu příkazy přikazují.
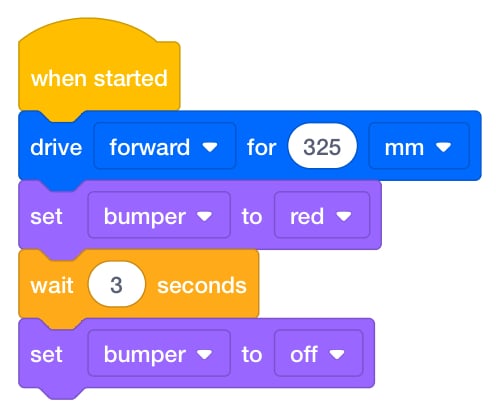
V této animaci můžete vidět, jak projekt začíná blokem {When started} na začátku projektu a poté se každý blok provádí v pořadí odshora dolů. Kódová základna se pojede vpřed o 325 milimetrů (mm) na poli GO Field, počká 2 sekundy a poté se na LED nárazníku rozsvítí barva. Zelené zvýraznění kolem bloků indikuje, který jednotlivý blok je v daném okamžiku spuštěný. To může studentům poskytnout okamžitou zpětnou vazbu, která jim umožní propojit chování kódové základny s konkrétními bloky VEXcode GO.
Kroky pro seřazení projektu
-
Nejprve si stanovte cíl – co je třeba udělat? Například jeďte od začátku k prvnímu vzorku.
Jízda k objektu -
Poté rozeberte kroky potřebné k dosažení cíle a identifikujte bloky potřebné k jejich dosažení. Zde se budete muset posunout o 325 milimetrů (mm) vpřed, abyste dosáhli vzorku, poté nastavit LED nárazník senzoru na červenou barvu, aby signalizovala odběr vzorku, počkat 3 sekundy na odběr vzorku a poté nechat LED nárazník senzoru přestat svítit nebo zhasnout, aby signalizovala odběr vzorku. Toho lze dosáhnout pomocí bloků [Jeďte po dobu], [Čekejte] a [Nastavit barvu nárazníku].

bloků [Jeďte pro], [Čekejte] a [Nastavte barvu nárazníku]
-
Dále naplánujte posloupnost projektu přetažením odpovídajících bloků do pracovního prostoru a jejich připojením k bloku {When started} shora dolů. S každým přidaným blokem změňte parametry tak, aby odpovídaly dříve popsaným krokům.
-
Vyberte „Start“ pro otestování projektu a zjistěte, zda kódová báze splňuje cíl identifikovaný v prvním kroku.
Vyberte „Start“
Pokud chcete změnit svůj projekt, jednoduše změňte parametry nebo přidejte a odeberte bloky z projektu před dalším testováním.
Co je VEXcode GO?
VEXcode GO je kódovací prostředí, které se používá ke komunikaci s roboty VEX GO. Studenti používají rozhraní drag and drop k vytváření projektů VEXcode GO, které ovládají akce jejich robotů. Účel každého bloku lze identifikovat pomocí vizuálních podnětů, jako je jeho tvar, barva a označení. Více informací o práci s VEXcode GO naleznete v sekci VEXcode GO v knihovně VEX.
V této jednotce budou použity následující bloky GO z VEXcode:
| Bloky GO v kódu VEXcode | Chování |
|---|---|
 |
Blok {When start} začne spouštět připojený zásobník bloků při spuštění projektu. |
 |
Blok [Drive for] posouvá hnací ústrojí dopředu nebo dozadu o danou vzdálenost. Nastavte, o kolik se hnací ústrojí posune, zadáním hodnoty do oválu. |
 |
Blok [Otočit o] otočí hnací ústrojí o danou vzdálenost. Nastavte, o kolik se hnací ústrojí otočí, zadáním hodnoty do oválu. |
 |
Blok [Wait] čeká po určitou dobu, než se přesune k dalšímu bloku v projektu. |
 |
Blok [Nastavit barvu nárazníku] nastavuje barvu LED nárazníku. |