
Mars Rover: وحدة العمليات السطحية سوف تعرّفك أنت وطلابك على كيفية بناء مشاريع VEXcode GO لحل المشكلة. تُستخدم إجراءات المركبة الجوالة Perseverance ومهمة Mars 2020 كمصدر إلهام للتحديات التي سيعمل الطلاب من خلالها باستخدام VEXcode GO وCode Base. ستحتاج المشاريع التي يقومون بإنشائها إلى التسلسل الصحيح لجمع العينات و"دفنها".
مهمة ناسا إلى المريخ 2020
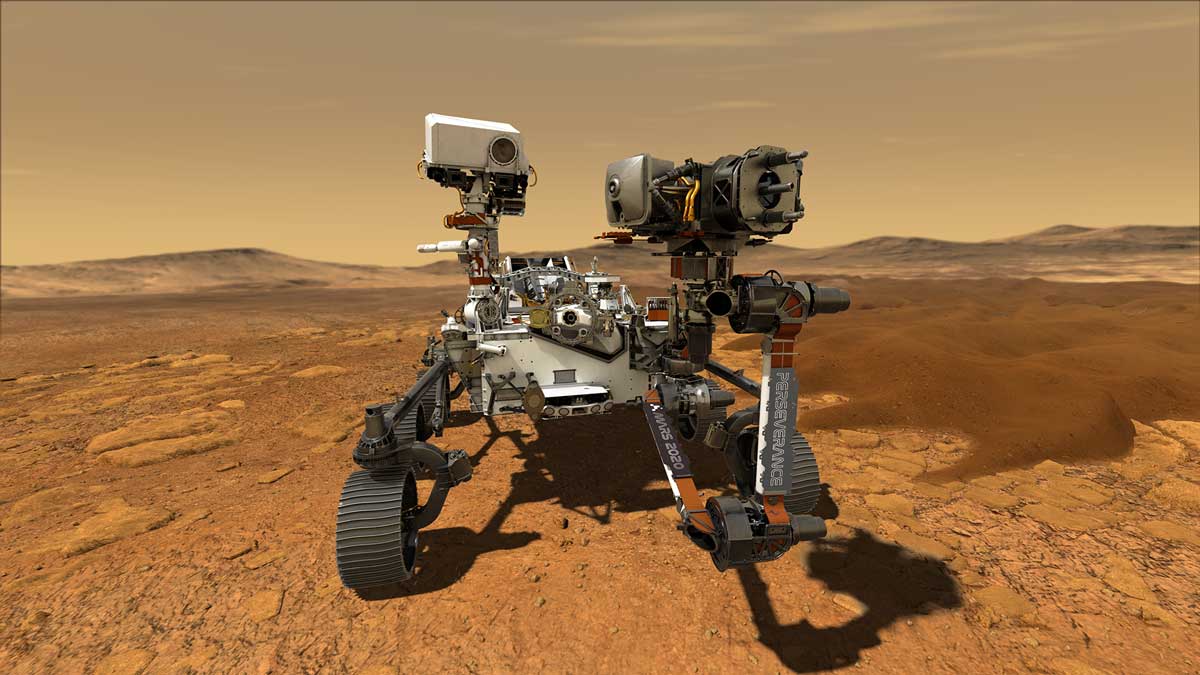
تتناول مهمة ناسا للمريخ 2020 الأهداف العلمية ذات الأولوية العالية لاستكشاف المريخ: الحياة والمناخ والجيولوجيا والبشر. ستكمل المركبة الجوالة Perseverance العمليات السطحية لجمع البيانات للمساعدة في إثراء البحث على الكوكب الأحمر.
ما هو روفر؟
العربة الجوالة هي جهاز مصمم للتحرك عبر السطح الصلب لكوكب أو أي جسم سماوي آخر (مثل القمر). تم تصميم بعض المركبات الجوالة لنقل أفراد طاقم الفضاء، في حين أن بعضها الآخر عبارة عن روبوتات مستقلة جزئيًا أو كليًا. يتم تكليف هذه الروبوتات عمومًا بجمع معلومات حول التضاريس وجمع عينات من الصخور أو الأوساخ أو التربة أو حتى السوائل.
ما هي العمليات السطحية؟
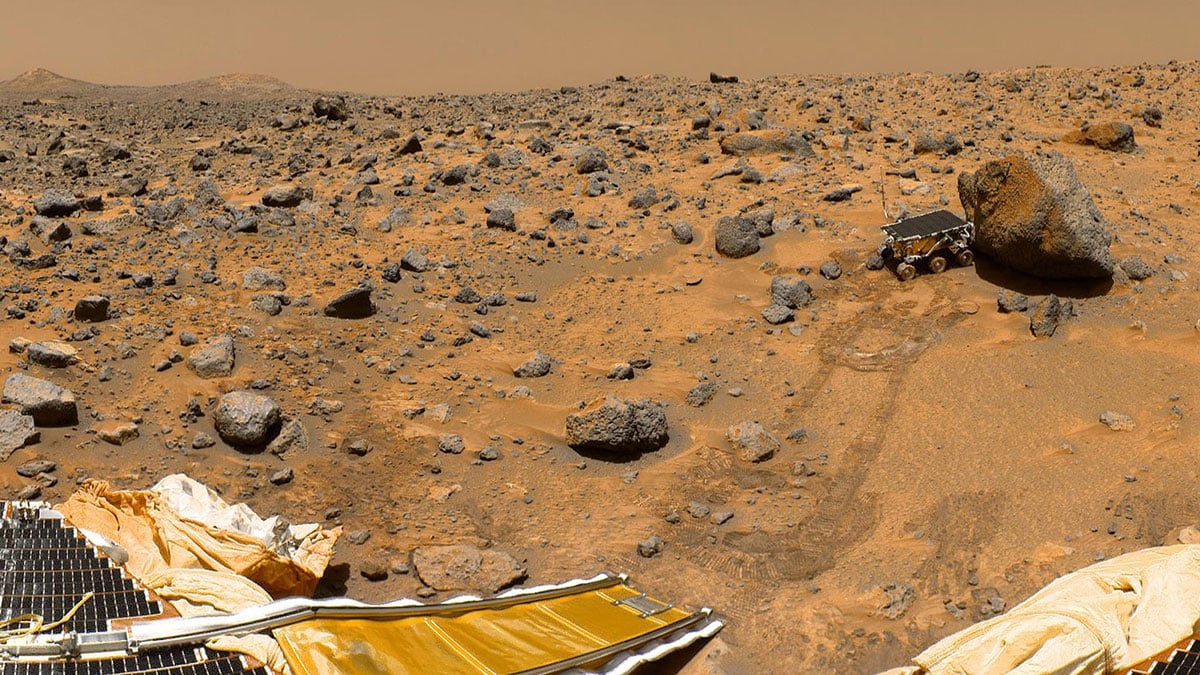
العمليات السطحية هي الدراسات العلمية التي ستكملها المركبة على المريخ. وتركز جميعها على البحث عن العينات الجيولوجية وجمعها وتخزينها مؤقتًا. للبدء، سوف تبحث المثابرة عن الصخور الجذابة. يمكن اعتبار الصخور مقنعة إذا كانت لديها إمكانية الحفاظ على آثار كيميائية للحياة القديمة أو تم تغييرها بواسطة بيئة تدعم الحياة الميكروبية.
بعد تحديد الصخور الجذابة، ستقوم بيرسيفيرانس باستخراج عينة ووضعها في أنبوب مغلق وتخزينها مؤقتًا على السطح. التخزين المؤقت للمستودع، المستخدم خلال هذه المهمة، هو حيث يتم ترك عينات متعددة أو دفنها في نفس الموقع. ستتمكن بعد ذلك مهمة مستقبلية من استعادة هذه العينات وإعادتها جميعًا إلى العلماء على الأرض.
ما هو التسلسل؟
التسلسل هو الترتيب المحدد الذي يتم به تنفيذ السلوكيات. يؤدي الإجراء أو الحدث إلى الإجراء المرتب التالي في تسلسل. يعد التسلسل أمرًا مهمًا لقاعدة التعليمات البرمجية، لأن الروبوت لن يتحرك إلا وفقًا لما تطلبه منه الأوامر.
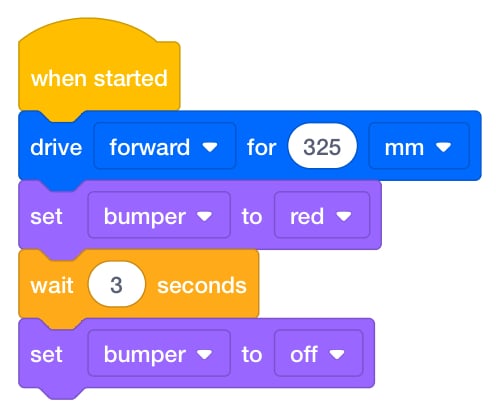
في هذه الرسوم المتحركة، يمكنك رؤية كيف يبدأ المشروع بالكتل {When started} في أعلى المشروع، ثم يتم تنفيذ كل كتلة بالترتيب من الأعلى إلى الأسفل. تتحرك قاعدة الكود للأمام لمسافة 325 ملم (مم) في حقل GO، وتنتظر ثانيتين، ثم تتوهج بلون على مصد LED. تشير ميزة التمييز باللون الأخضر حول الكتل إلى الكتلة الفردية التي تعمل في تلك اللحظة. يمكن أن يوفر هذا للطلاب تعليقات فورية لربط سلوكيات Code Base مع كتل VEXcode GO المحددة.
خطوات تسلسل المشروع
- أولاً، حدد الهدف – ما الذي يجب القيام به؟ على سبيل المثال، قم بالقيادة من البداية إلى العينة الأولى.
القيادة إلى الكائن - ثم قم بتقسيم الخطوات اللازمة لتحقيق الهدف، وحدد العناصر اللازمة لإنجاز هذه الخطوات. هنا سوف تحتاج إلى التحرك للأمام بمقدار 325 ملم (مم) للوصول إلى العينة، ثم قم بضبط مستشعر المصد LED على التوهج باللون الأحمر لإظهار أنه يجمع عينة، انتظر 3 ثوانٍ لجمع العينة، ثم احصل على مستشعر المصد LED توقف التوهج أو أطفئ للإشارة إلى أنه تم جمع العينة. يمكن تحقيق ذلك من خلال الكتل [Drive for] و[Wait] و[Set bumper color].

كتل [القيادة من أجل] و[انتظر] و[ضبط لون المصد] - بعد ذلك، قم بتخطيط تسلسل المشروع عن طريق سحب الكتل المطابقة إلى مساحة العمل وإرفاقها بالكتل {When started} من الأعلى إلى الأسفل. عند إضافة كل كتلة، قم بتغيير المعلمات لتتناسب مع الخطوات الموضحة مسبقًا.
- حدد "ابدأ" لاختبار المشروع ومعرفة ما إذا كان Code Base يحقق الهدف المحدد في الخطوة الأولى.
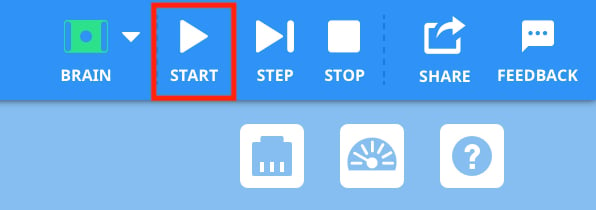
اختر "ابدأ"
إذا كنت تريد تغيير مشروعك، فما عليك سوى تغيير المعلمات، أو إضافة وإزالة الكتل من المشروع قبل الاختبار مرة أخرى.
ما هو VEXcode GO؟
VEXcode GO هي بيئة برمجة تُستخدم للتواصل مع روبوتات VEX GO. يستخدم الطلاب واجهة السحب والإفلات لإنشاء مشاريع VEXcode GO التي تتحكم في تصرفات الروبوتات الخاصة بهم. يمكن تحديد غرض كل كتلة باستخدام إشارات مرئية مثل الشكل واللون والتسمية. لمزيد من المعلومات حول كيفية العمل مع VEXcode GO، راجع قسم VEXcode GO في مكتبة VEX.
سيتم استخدام كتل VEXcode GO التالية في هذه الوحدة:
| كتل VEXcode GO | السلوكيات |
|---|---|
 |
تبدأ الكتلة {When start} في تشغيل مجموعة الكتل المرفقة عند بدء المشروع. |
 |
تعمل كتلة [Drive for] على تحريك مجموعة نقل الحركة للأمام أو للخلف لمسافة معينة. قم بتعيين المدى الذي ستتحرك به مجموعة نقل الحركة عن طريق إدخال قيمة في الشكل البيضاوي. |
![كتلة [التحول إلى]](/stemlabs/sites/default/files/inline-images/IMG_414BE74E5802-1.jpeg) |
تعمل كتلة [Turn for] على تحويل نظام نقل الحركة لمسافة معينة. قم بتعيين المدى الذي ستدور فيه مجموعة نقل الحركة عن طريق إدخال قيمة في الشكل البيضاوي. |
![كتلة [الانتظار].](/stemlabs/sites/default/files/inline-images/IMG_50B404FA3105-1.jpeg) |
تنتظر الكتلة [الانتظار] فترة زمنية محددة قبل الانتقال إلى الكتلة التالية في المشروع. |
 |
تقوم كتلة [ضبط لون المصد] بتعيين لون مصد LED. |