
Achtergrond
Met de Mars Rover: Surface Operations Unit maken jij en je leerlingen kennis met het bouwen van VEXcode GO-projecten om een probleem op te lossen. De acties van de Perseverance-rover en de Mars 2020-missie dienen als inspiratie voor de uitdagingen waarmee de studenten aan de slag gaan met behulp van VEXcode GO en de Code Base. De projecten die zij maken, moeten in de juiste volgorde worden gezet om monsters te verzamelen en te 'begraven'.
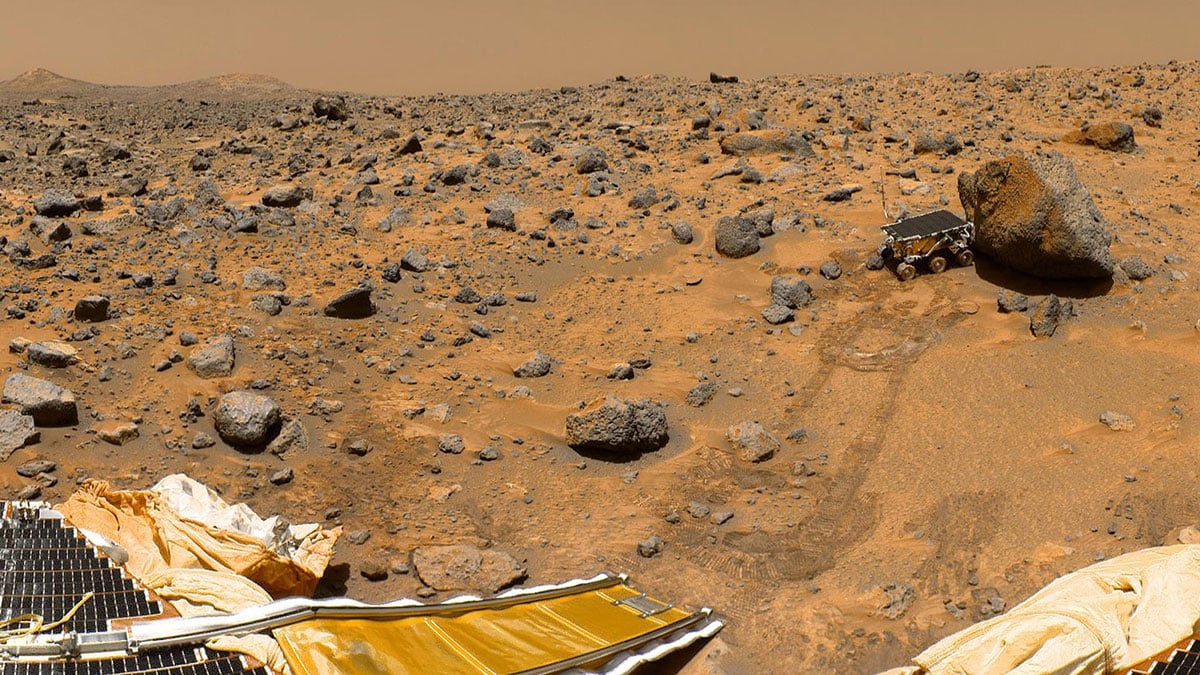
NASA's Mars 2020-missie
De Mars 2020-missie van NASA is gericht op wetenschappelijke doelen met hoge prioriteit voor de exploratie van Mars: leven, klimaat, geologie en mensen. De Perseverance-rover zal de oppervlaktewerkzaamheden voltooien om gegevens te verzamelen voor onderzoek op de Rode Planeet.
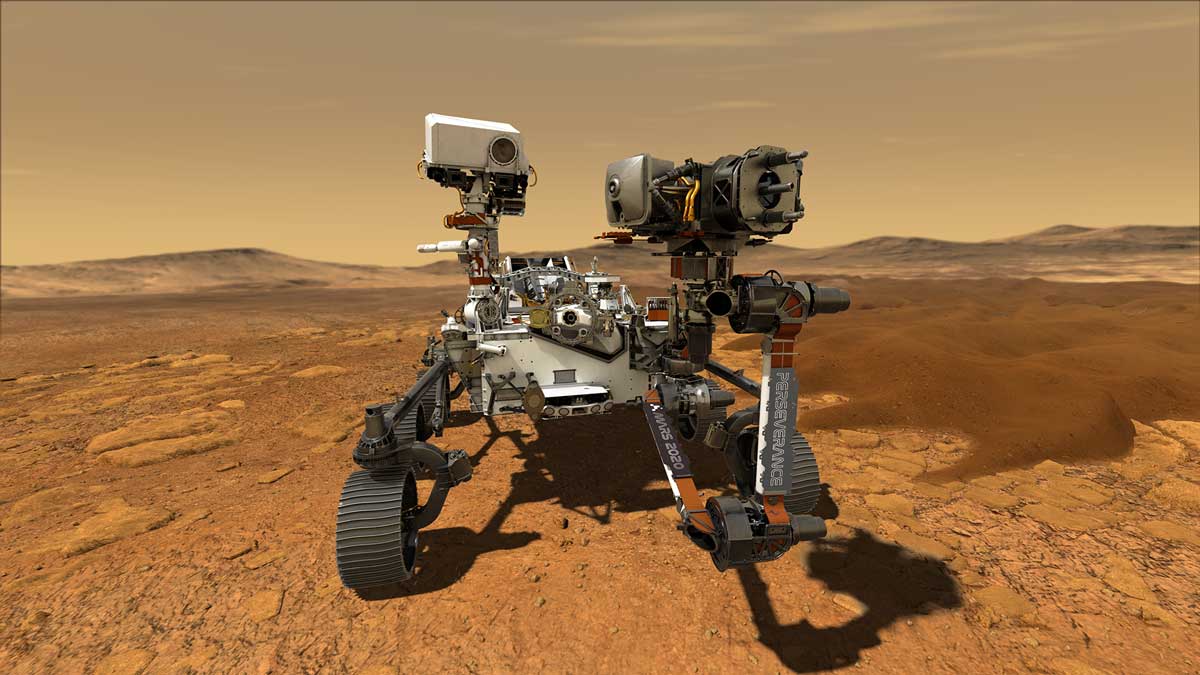
Wat is een rover?
Een rover is een apparaat dat is ontworpen om over het vaste oppervlak van een planeet of ander hemellichaam (zoals de maan) te bewegen. Sommige rovers zijn ontworpen om leden van een ruimtebemanning te vervoeren, terwijl andere gedeeltelijk of volledig autonome robots zijn. Deze robots hebben over het algemeen de taak om informatie over het terrein te verzamelen en monsters te nemen van rotsen, aarde, grond of zelfs vloeistoffen.
Wat zijn oppervlakteoperaties?
Oppervlakteoperaties zijn de wetenschappelijke studies die de rover op Mars zal uitvoeren. Deze zijn allemaal gericht op het vinden, verzamelen en opslaan van geologische monsters. Om te beginnen gaat Perseverance op zoek naar opvallende rotsen. Een gesteente kan als fascinerend worden beschouwd als het de mogelijkheid vertoont dat er chemische sporen van oud leven in bewaard zijn gebleven of dat het is veranderd door een omgeving die microbieel leven mogelijk maakte.
Nadat Perseverance de fascinerende rotsen heeft geïdentificeerd, boort hij een monster uit, plaatst dit in een afgesloten buis en bewaart het op het oppervlak. Depotcaching, dat tijdens deze missie wordt gebruikt, is het achterlaten of begraven van meerdere monsters op dezelfde locatie. Een toekomstige missie zal deze monsters dan kunnen ophalen en ze allemaal samen terugbrengen naar de wetenschappers op aarde.
Wat is een sequentie?
Een sequentie is de specifieke volgorde waarin gedrag wordt uitgevoerd. Een actie of gebeurtenis leidt tot de volgende actie in een reeks. Sequentie is belangrijk voor de Code Base, omdat de robot alleen precies zo beweegt als de commando's hem opdragen.
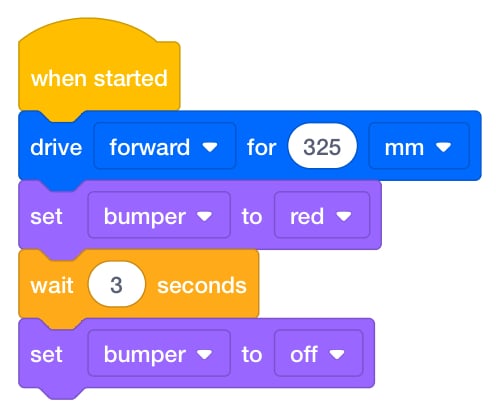
In deze animatie ziet u hoe het project start met het blok {When started} bovenaan het project. Vervolgens wordt elk blok van boven naar beneden uitgevoerd. De Code Base rijdt 325 millimeter (mm) vooruit op een GO-veld, wacht 2 seconden en licht dan een kleur op op de LED-bumper. De groene markeringsfunctie rond de blokken geeft aan welk blok op dat moment actief is. Hierdoor krijgen studenten direct feedback waarmee ze het gedrag van de Code Base kunnen koppelen aan specifieke VEXcode GO-blokken.
Stappen om een project te sequencen
-
Identificeer eerst het doel: wat moet er gedaan worden? Rijd bijvoorbeeld van het begin naar het eerste monster.
Rijd naar het object -
Verdeel vervolgens de stappen die nodig zijn om het doel te bereiken en identificeer de blokkades die nodig zijn om deze stappen te voltooien. Hier moet u 325 millimeter (mm) vooruit bewegen om het monster te bereiken en vervolgens de LED-bumpersensor rood laten oplichten om aan te geven dat er een monster wordt verzameld. Wacht vervolgens 3 seconden om het monster te verzamelen en laat de LED-bumpersensor stoppen met oplichten of uitgaan om aan te geven dat het monster is verzameld. Dit kan worden bereikt met de blokken [Drive for], [Wait] en [Set bumper color].

blokken [Rijden voor], [Wachten] en [Bumperkleur instellen]
-
Plan vervolgens de volgorde van het project door de overeenkomende blokken naar de werkruimte te slepen en ze van boven naar beneden aan het blok {When started} te koppelen. Wijzig bij het toevoegen van een blok de parameters zodat deze overeenkomen met de eerder opgedeelde stappen.
-
Selecteer 'Start' om het project te testen en te zien of de codebasis het doel bereikt dat in de eerste stap is geïdentificeerd.
Selecteer 'Start'
Als u uw project wilt wijzigen, hoeft u alleen maar parameters te wijzigen of blokken aan het project toe te voegen of te verwijderen voordat u opnieuw test.
Wat is VEXcode GO?
VEXcode GO is een codeeromgeving die wordt gebruikt om te communiceren met VEX GO-robots. Studenten gebruiken de drag-and-dropinterface om VEXcode GO-projecten te maken waarmee ze de acties van hun robots kunnen aansturen. Het doel van elk blok kan worden geïdentificeerd aan de hand van visuele aanwijzingen, zoals de vorm, kleur en het label. Voor meer informatie over het werken met VEXcode GO, de VEXcode GO-sectie van de VEX-bibliotheek.
De volgende VEXcode GO-blokken worden in deze unit gebruikt:
| VEXcode GO-blokken | Gedragingen |
|---|---|
 |
Blok {When start} begint met het uitvoeren van de gekoppelde stapel blokken wanneer het project wordt gestart. |
 |
Het blok [Drive for] beweegt de aandrijflijn een bepaalde afstand vooruit of achteruit. Geef aan hoe ver de aandrijflijn moet bewegen door een waarde in te voeren in het ovaal. |
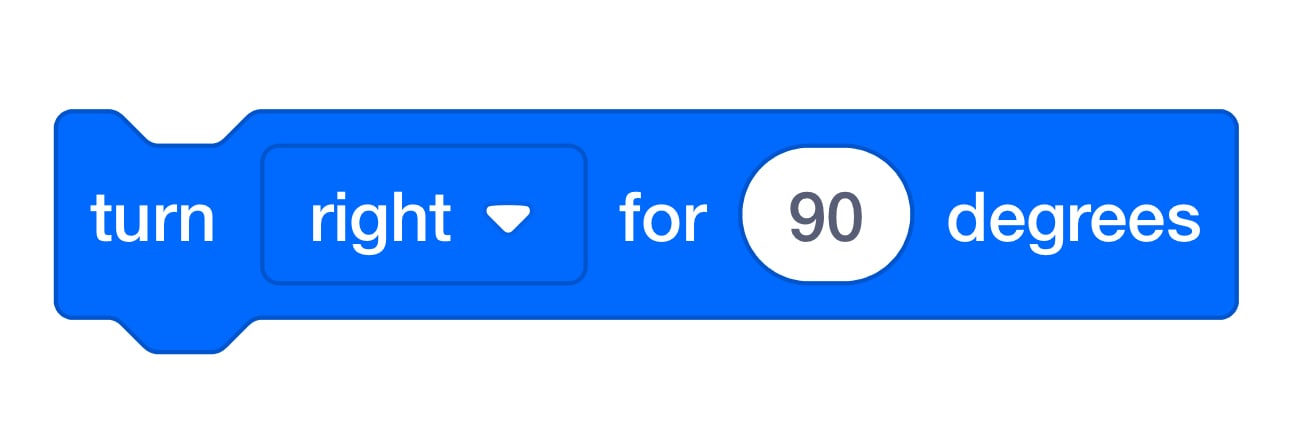 |
Met het blok [Draai voor] draait u de aandrijflijn over een bepaalde afstand. Geef aan hoe ver de aandrijflijn moet draaien door een waarde in te voeren in het ovaal. |
 |
Het blok [Wachten] wacht een bepaalde tijd voordat er naar het volgende blok in een project wordt gegaan. |
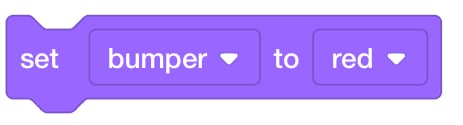 |
Met het blok [Bumperkleur instellen] stelt u de kleur van de LED-bumper in. |