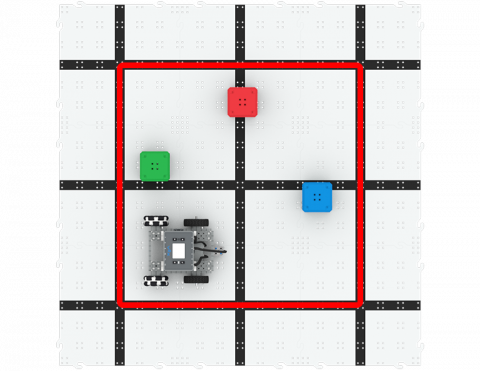
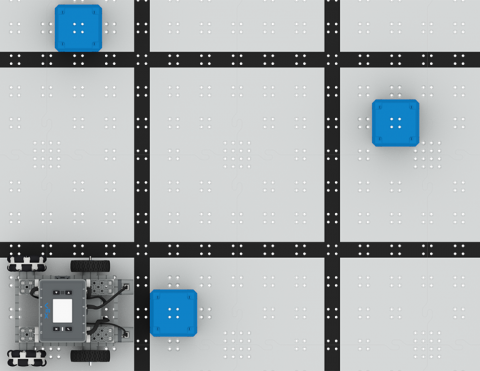
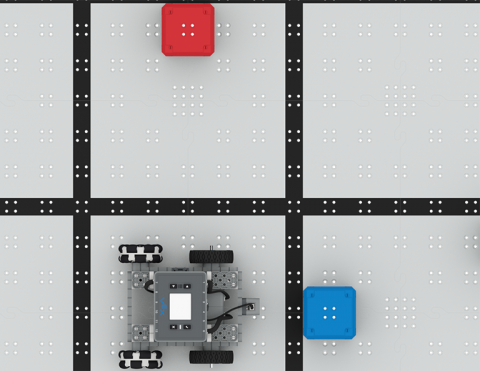
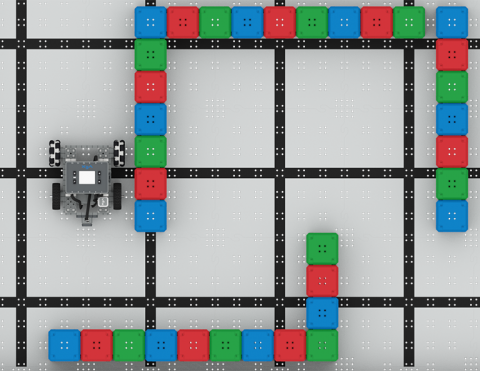
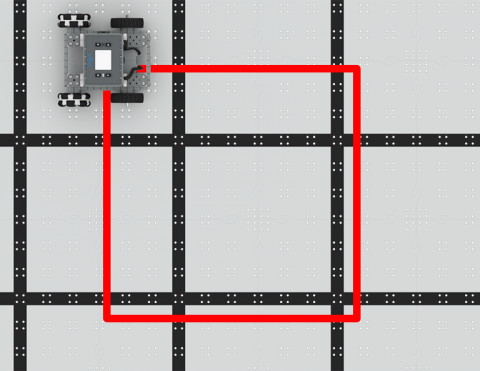
Navegue pelo labirinto de uma cidade usando o Controlador. Primeiro, construa a cidade e depois dirija nela!
Activity Link
https://docs.google.com/document/d/1D8E_esQUScxcGfeseCUlLdIFtKZJYtaXHrWqvbTo5h0/edit#
Activity Image
Imagem
VEX Platform
Subject
Builds
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - BaseBot Driver.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - BaseBot Driver.docx