
Arka plan
Mars Rover: Yüzey Operasyonları Birimi, sizi ve öğrencilerinizi bir problemi çözmek için VEXcode GO projeleri oluşturmaya alıştıracaktır. Perseverance gezgini ve Mars 2020 Görevi'nin eylemleri, öğrencilerin VEXcode GO ve Kod Tabanı'nı kullanarak üstesinden gelecekleri zorluklar için ilham kaynağı olarak kullanılıyor. Oluşturdukları projelerin, örnekleri toplayıp 'gömmek' için doğru şekilde sıralanması gerekecek.
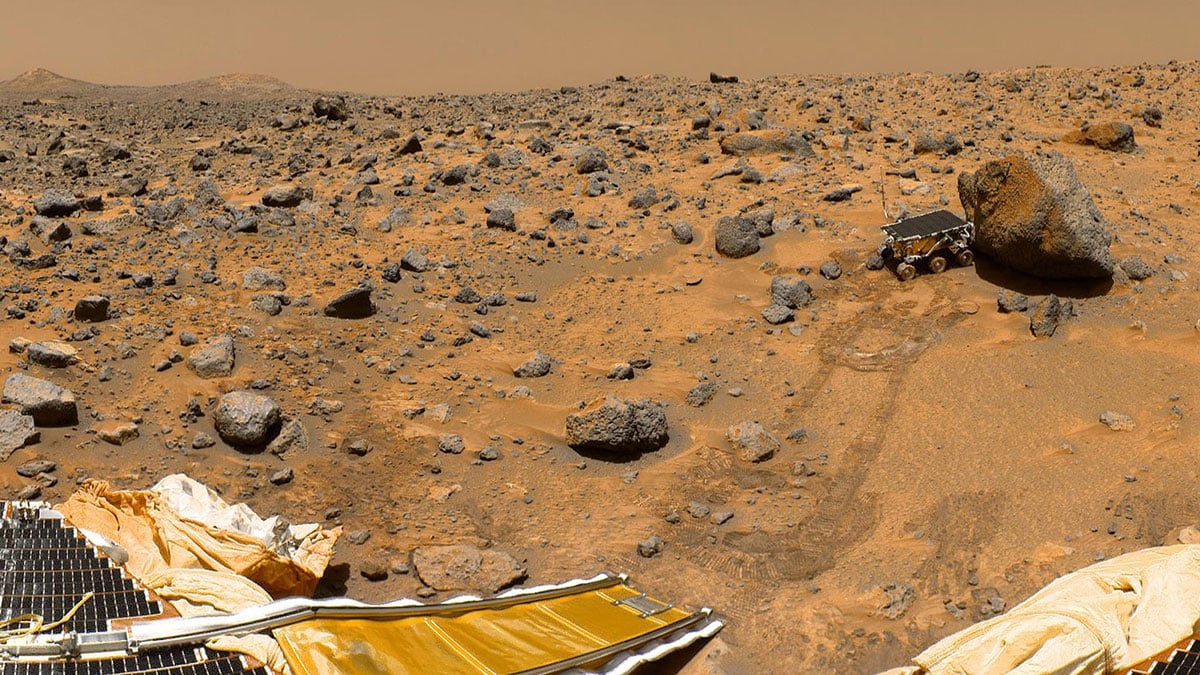
NASA'nın Mars 2020 Görevi
NASA'nın Mars 2020 Misyonu, Mars keşfi için yüksek öncelikli bilimsel hedeflere odaklanıyor: yaşam, iklim, jeoloji ve insanlar. Perseverance gezgini, Kızıl Gezegen'deki araştırmalara bilgi sağlamak için veri toplamak amacıyla yüzey operasyonlarını tamamlayacak.
Gezici nedir?
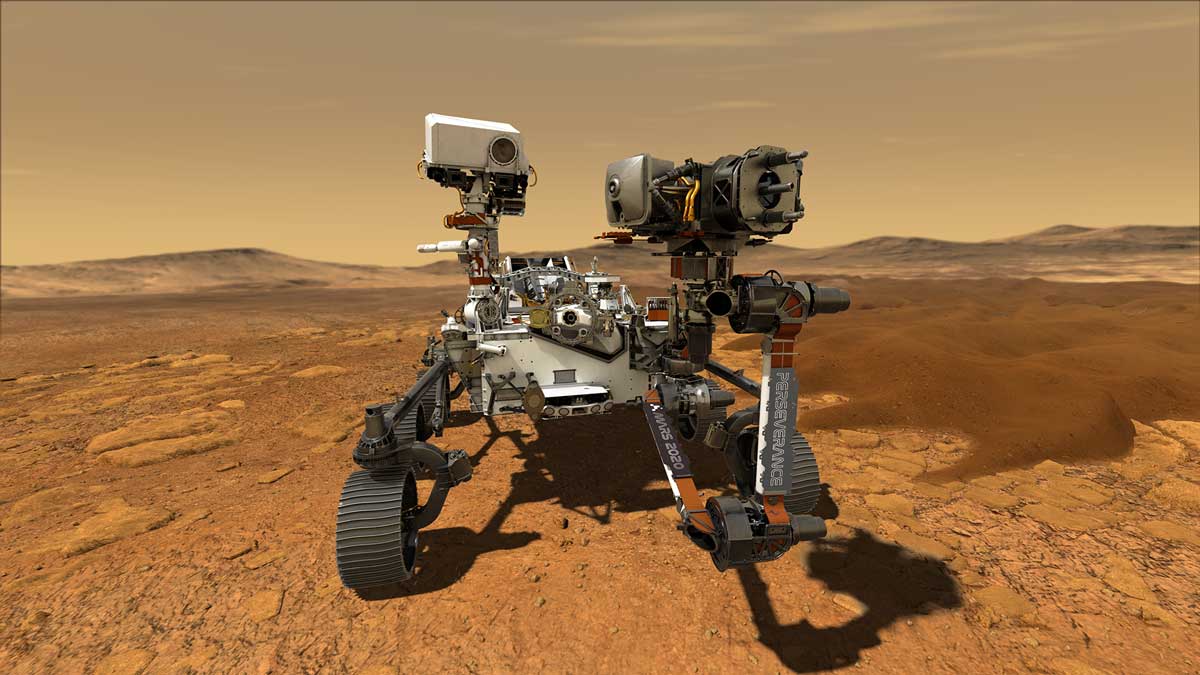
Gezici, bir gezegenin veya başka bir gök cisminin (Ay gibi) katı yüzeyinde hareket etmek üzere tasarlanmış bir cihazdır. Bazı gezginler uzay mürettebatının üyelerini taşımak için tasarlanırken, diğerleri kısmen veya tamamen otonom robotlardır. Bu robotların görevi genellikle arazi hakkında bilgi toplamak ve kaya, toprak, toprak hatta sıvı örnekleri toplamaktır.
Yüzey operasyonları nelerdir?
Yüzey operasyonları, gezicinin Mars'ta tamamlayacağı bilimsel çalışmalardır. Bunların hepsi jeolojik örneklerin bulunması, toplanması ve saklanmasına odaklıdır. Perseverance, başlangıç olarak çekici kayaları arayacak. Bir kayanın, antik yaşamın kimyasal izlerini korumuş olma olasılığı varsa veya mikrobiyal yaşamı destekleyen bir çevre tarafından değiştirilmiş olma olasılığı varsa, çekici olarak kabul edilebilir.
Perseverance, ilgi çekici kayaları belirledikten sonra bir örnek delecek, bunu kapalı bir tüpe yerleştirecek ve yüzeyde saklayacak. Bu görev sırasında kullanılan depo önbelleği, birden fazla numunenin aynı yere bırakılması veya gömülmesidir. Gelecekteki bir görev, bu örnekleri alıp hepsini birlikte Dünya'daki bilim insanlarına geri getirebilecek.
Dizi nedir?
Sıra, davranışların gerçekleştirildiği belirli bir düzendir. Bir eylem veya olay, bir dizideki bir sonraki sıralı eyleme yol açar. Sıralama, Kod Tabanı için önemlidir, çünkü robot yalnızca komutların söylediği şekilde hareket edecektir.
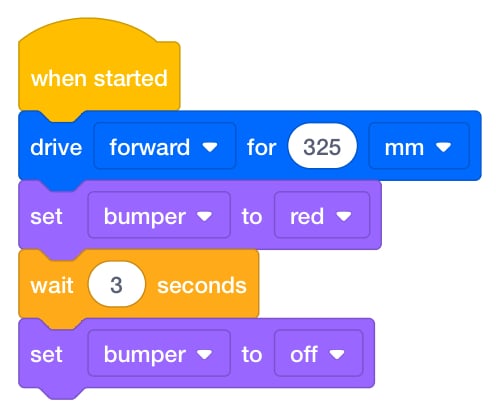
Bu animasyonda projenin en üstteki {When started} bloğundan nasıl başladığını, daha sonra her bloğun yukarıdan aşağıya doğru sırayla nasıl yürütüldüğünü görebilirsiniz. Code Base, GO Field üzerinde 325 milimetre (mm) ileri doğru hareket ediyor, 2 saniye bekliyor ve ardından LED Bumper üzerinde bir renk parlıyor. Blokların etrafındaki yeşil Vurgu Özelliği, o anda hangi bloğun çalıştığını gösterir. Bu, öğrencilere Kod Tabanının davranışlarını belirli VEXcode GO bloklarıyla ilişkilendirmek için anında geri bildirim sağlayabilir.
Bir Projeyi Sıralamanın Adımları
-
Öncelikle hedefi belirleyin; ne yapılması gerekiyor? Örneğin, başlangıçtan ilk örneğe kadar sürün.
Nesneye doğru sürün -
Daha sonra hedefe ulaşmak için gereken adımları parçalara ayırın ve bu adımları gerçekleştirmek için gereken engelleri belirleyin. Burada numuneye ulaşmak için 325 milimetre (mm) ilerlemeniz, ardından LED Tampon Sensörünün numune topladığını göstermek için kırmızı yanmasını ayarlamanız, numuneyi toplamak için 3 saniye beklemeniz ve ardından numunenin toplandığını göstermek için LED Tampon Sensörünün yanmasını durdurmanız veya kapatmanız gerekecektir. Bu, [Sürüş], [Bekle] ve [Tampon rengini ayarla] blokları ile gerçekleştirilebilir.

[Sürüş], [Bekle] ve [Tampon rengini ayarla] blokları
-
Daha sonra eşleşen blokları çalışma alanına sürükleyip {When started} bloğuna yukarıdan aşağıya doğru bağlayarak projenin sırasını planlayın. Her blok eklendikçe, daha önce açıklanan adımlara uyacak şekilde parametreleri değiştirin.
-
Projeyi test etmek ve Kod Tabanının ilk adımda belirlenen hedefe ulaşıp ulaşmadığını görmek için “Başlat”ı seçin.
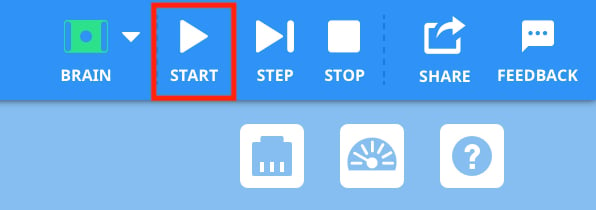
'Başlat'ı seçin
Projenizi değiştirmek isterseniz, tekrar test etmeden önce parametreleri değiştirmeniz veya projeye blok eklemeniz veya çıkarmanız yeterlidir.
VEXcode GO nedir?
VEXcode GO, VEX GO robotlarıyla iletişim kurmak için kullanılan bir kodlama ortamıdır. Öğrenciler, robotlarının hareketlerini kontrol eden VEXcode GO projeleri oluşturmak için sürükle ve bırak arayüzünü kullanırlar. Her bloğun amacı, şekli, rengi ve etiketi gibi görsel ipuçları kullanılarak belirlenebilir. For more information on how to work with VEXcode GO, see the VEXcode GO Section of the VEX Library.
Bu Ünitede aşağıdaki VEXcode GO blokları kullanılacaktır:
| VEXcode GO blokları | Davranışlar |
|---|---|
 |
{When start} bloğu proje başlatıldığında ekli blok yığınını çalıştırmaya başlar. |
 |
[Drive for] bloğu, Aktarma Organlarını belirli bir mesafe ileri veya geri hareket ettirir. Oval'e bir değer girerek Aktarma Organlarının ne kadar hareket edeceğini ayarlayın. |
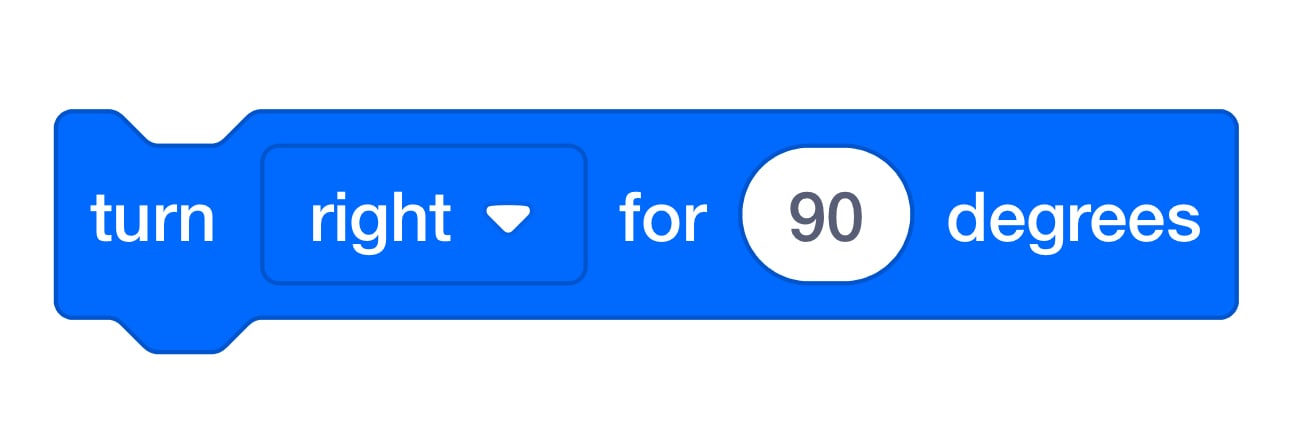 |
[Turn for] bloğu, Aktarma Organlarını belirli bir mesafe boyunca döndürür. Ovale bir değer girerek Aktarma Organlarının ne kadar döneceğini ayarlayın. |
 |
[Wait] bloğu, bir projedeki bir sonraki bloğa geçmeden önce belirli bir süre bekler. |
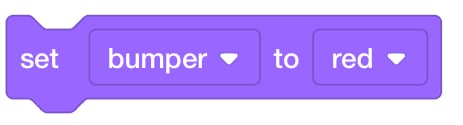 |
[Tampon rengini ayarla] bloğu LED Tamponunun rengini ayarlar. |