
Now that you have experience flying with the Motorized Hook Module, you are ready to explore with additional challenges moving orbit balls with the VEX AIR Drone and VEX AIR Drone Controller. Completing these missions requires physical inspection of the drone from the propellers to the landing feet. The landing feet are important to the stability of the drone during takeoff and landing.
Watch the video below to learn how to:
- Inspect the landing feet for damage
- Replace any worn or damaged landing feet
Mission Prep
Each exploration mission in this lesson focuses on flying with orbit balls while controlling your movement carefully and precisely. For each mission, make sure you:
- Complete a pre-flight check before every mission. Inspect your drone and landing feet for damage before flying.
- The Pre-Flight Checklist will be available in each Mission Log below so you have multiple reminders to complete these safety checks.
- Be sure the Motorized Hook Module is attached to the drone.
- See this article for pre-flight safety reminders and guidance on getting your drone ready for flight.
- Log each flight in your Mission Log. Record what worked, what didn’t, and what you want to improve.
- Practice each mission multiple times. Your goal is not just to complete the task, but to improve your accuracy and control while using the Motorized Hook Module.
- Reset the indoor flight area between attempts. This ensures that other pilots are starting with a consistent setup.
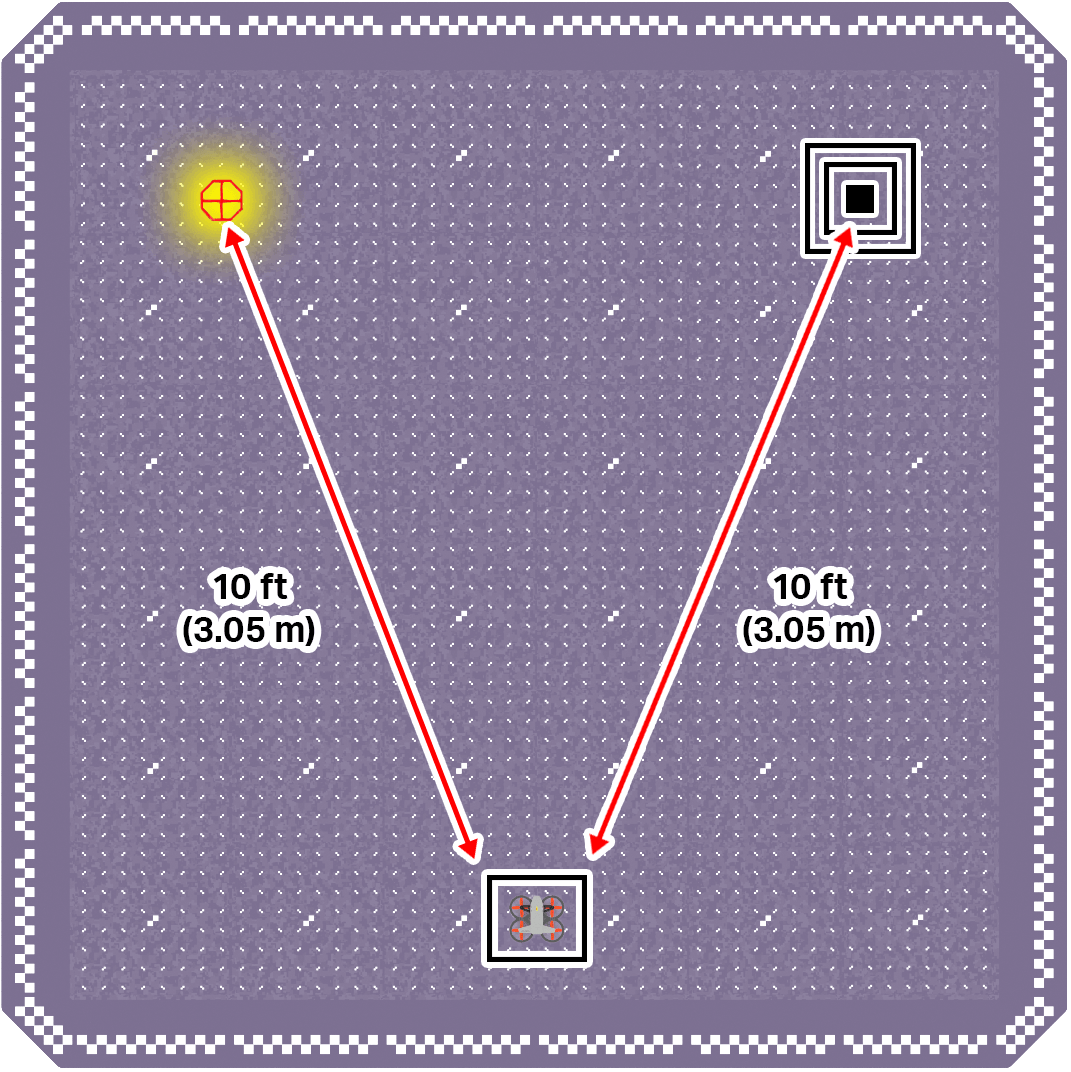
The goal of this mission is to fly the drone to pick up and move an orbit ball from its starting location to the target. Get as close to the middle of your target as you can!
To set up your indoor flight area, place an orbit ball in the upper left corner. Mark a target zone in the upper right corner. Both should be 10 ft (3.05 m) apart from the takeoff zone in the center of the bottom of the flight area. Use the image below for reference as you set up your flight area.
Record your results in your Mission Log (Google Doc / .docx / .pdf).
- Mark where the orbit ball landed in the target zone for each flight.
- Note strategies you used to help improve your precision and success with the Motorized Hook Module for each flight attempt.
Pro Tip: Use different camera views throughout the mission to ensure you have helpful visual information while flying.
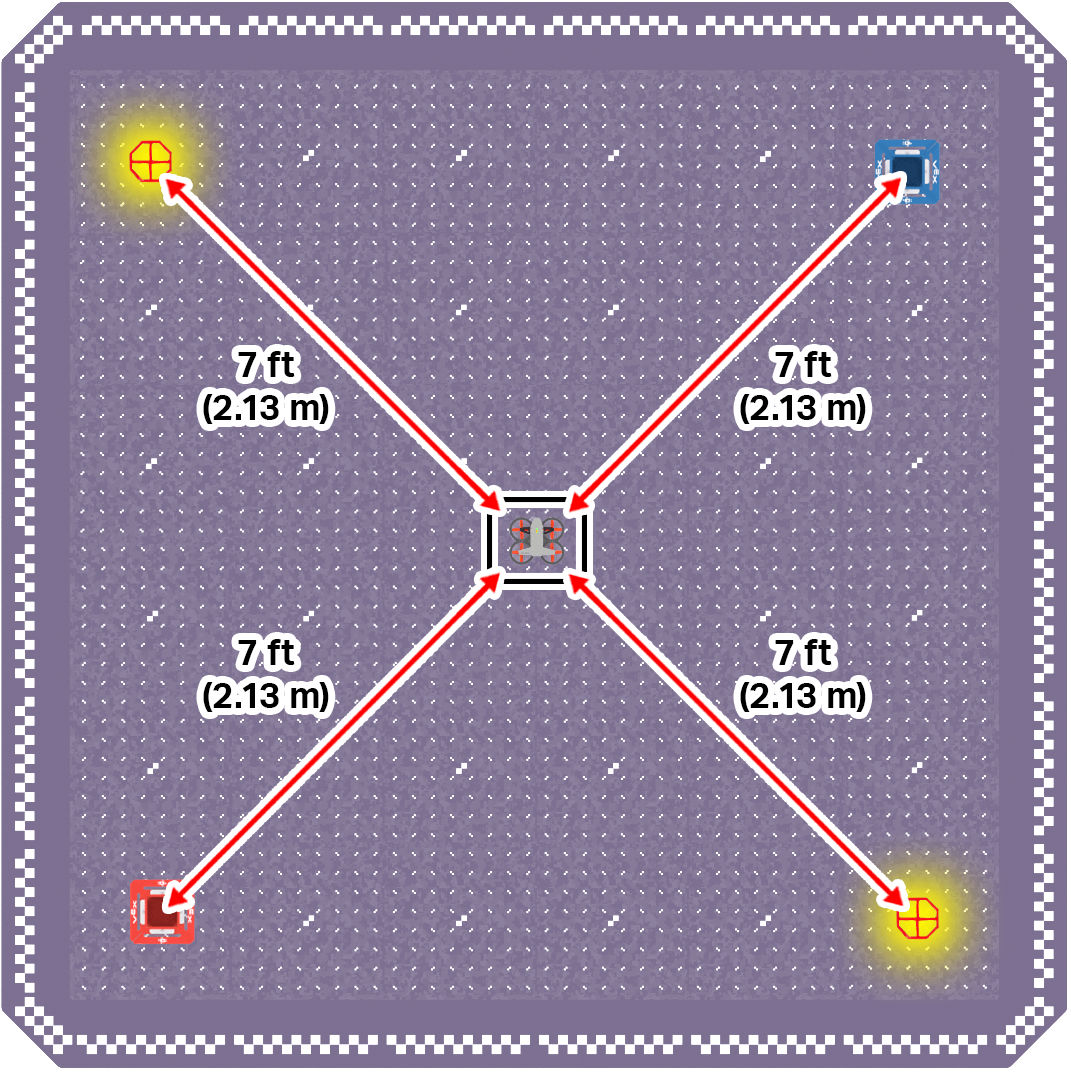
The goal of this mission is to fly the drone to pick up and move orbit balls from their starting locations across the flight area to drop-off zones. Only one object can be delivered to each drop-off zone.
To set up your indoor flight area, place one orbit ball in the upper left corner and one orbit ball in the lower right corner. Mark drop-off zones in the upper right and lower left corners of the flight area. Each one should be 7 ft (2.13 m) apart from the takeoff zone in the center of the flight area. Use the image below for reference as you set up your space.
Record your results in your Mission Log (Google Doc / .docx / .pdf).
- Note your intended path for each flight in your Mission Log. Number each location 1 through 4 in the order you intend to fly to them. You can also use arrows to indicate your intended path.
- Record how well your flight path worked and any strategies or tips you learned about moving orbit balls with precision and efficiency in your reflection.
Pro Tip: The angle of the hook on the module can make picking up an orbit ball difficult. Instead of moving straight down, line up the drone and lower the hook, then use a controlled forward motion to scoop the orbit ball. Keeping your movements smooth and steady will help you line up the hook and successfully pick up the object.
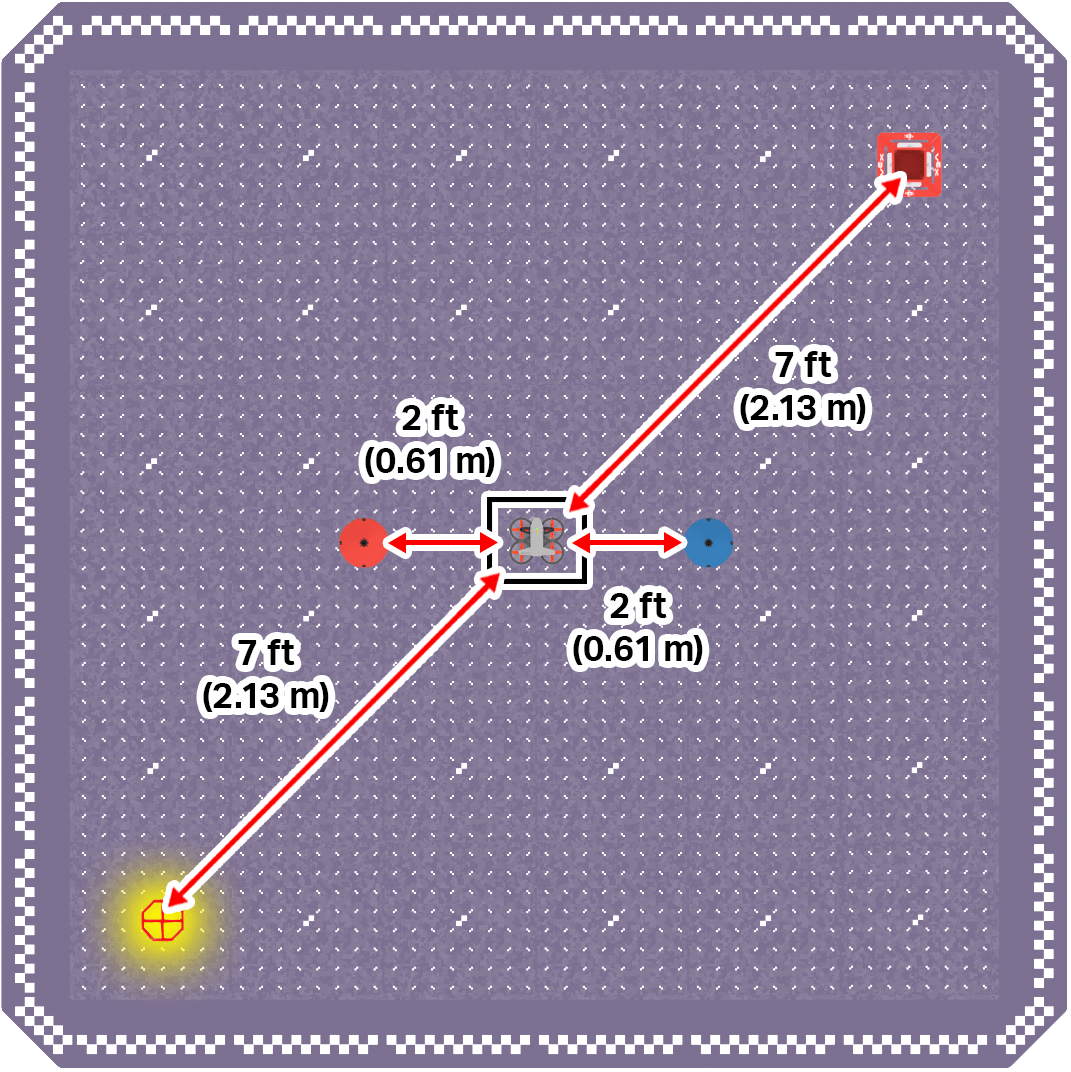
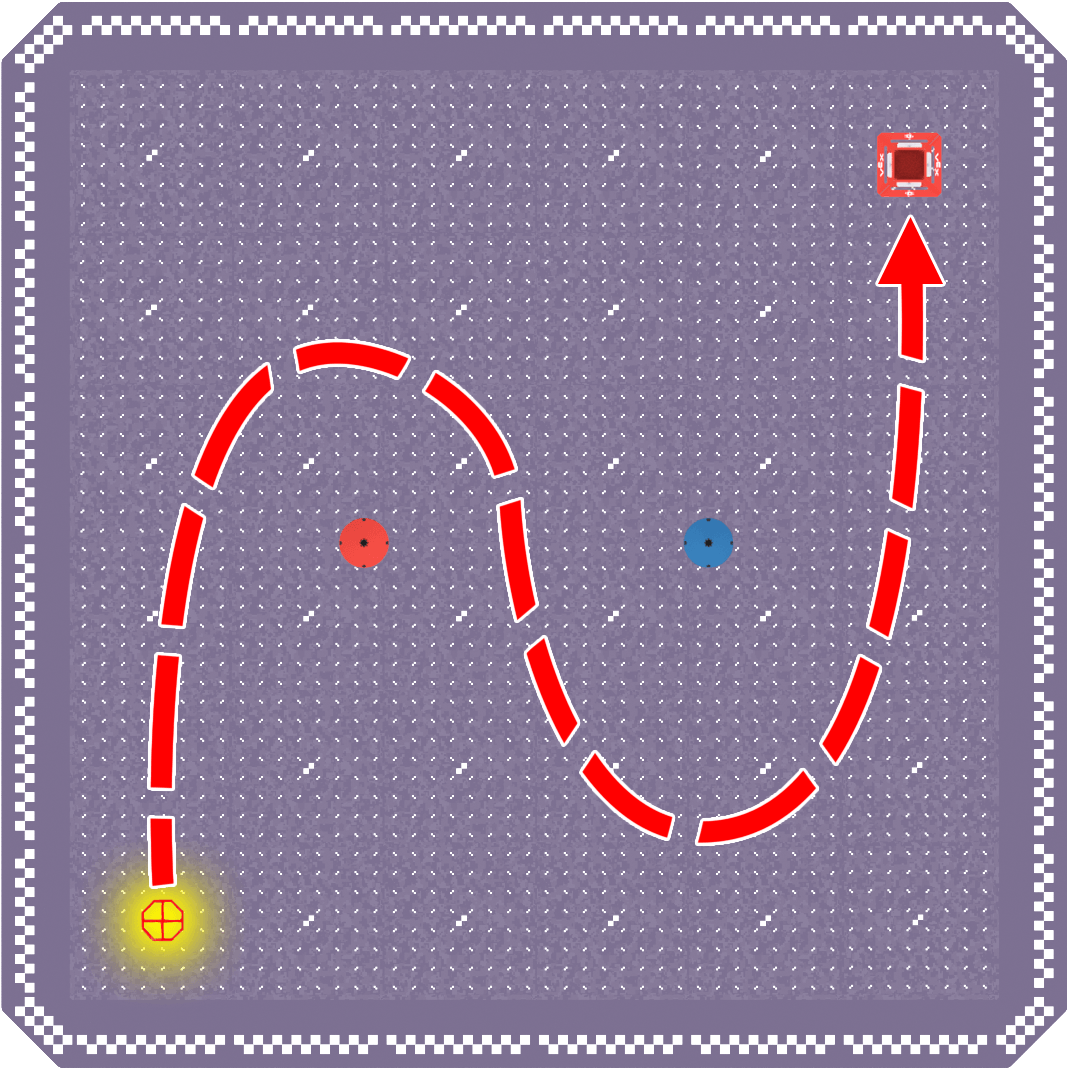
The goal of this mission is to pick up and move one orbit ball across the flight area in a zigzag path, and drop it in the drop-off zone.
Use the image below for reference as you set up your indoor flight area:
- Place one orbit ball in the lower left corner. The orbit ball should be 7 ft (2.13 m) apart from the takeoff zone in the center of the flight area.
- Mark a drop-off zone in the upper right corner. The drop-off zone should be 7 ft (2.13 m) apart from the drone.
- Mark two “obstacles” in the center of the flight area that you will fly around. Each one should be 2 ft (0.61 m) apart from the drone.
Record your results in your Mission Log (Google Doc / .docx / .pdf).
- Note things like how you knew when to change direction on the zigzag path, how the drone moved with an object attached, and tools you used to improve your movements.
Pro Tip: This mission is meant to simulate more complex movements, so be sure you are flying around each marked obstacle location. Reference the image in the Mission Objectives section if you need help remembering where the drone should fly to complete the mission.
Wrap-Up Discussion
Now that you have flown all three missions and logged your practice flights, pause and reflect on your progress. Throughout this course, you have learned how to safely operate a physical drone, perform basic maintenance, and use different modules to interact with objects in your environment. Consider how your skills have developed from your first flight to now, then discuss the following questions as a class.
- How have you improved as a drone pilot throughout this course? What are you able to do now that you were not able to do at the beginning?
- How has flying a physical drone compared to using the VEX AIR Virtual Flight Simulator? What skills transferred, and what felt different?
- How did flying the drone change when using each module (Passive, Magnet, and Motorized Hook)? For example, how was picking up objects different with each one? Which did you find most challenging or most effective? Why?
- Why is it important to inspect and maintain your drone, including checking propellers and landing feet? How does this impact your success during missions?
Select Return to Units > to move to the next unit.