
Souvislosti
Jednotka Červeného robota používá příběh Červené Karkulky jako prostředek k představení kódovacích konceptů sekvence, výběru a iterace – stavebních kamenů algoritmu. Studenti prozkoumají sekvenci v laboratoři 1 kódováním svého malého červeného robota, aby mohli jet do domu babičky pomocí různých sekvencí karet Drive Coder. V laboratoři 2 prozkoumají výběr pomocí karty kodéru „Drive till object“ a očního senzoru, aby robot řídil, dokud není detekován objekt. V laboratoři 3 budou studenti stavět na svých projektech a přidávat podmíněné pomocí karet kodéru „If red“, „Else“ a „End if“. Poté prozkoumají iteraci pomocí karty „Přejít na začátek“ a vytvoří „Algoritmus detekce vlků“.
Co je to algoritmus?
Algoritmy vám umožňují kódovat robota pro autonomní rozhodování v reakci na data z jeho prostředí. Algoritmus je přesná sada pokynů, která používá sekvenci, výběr a iteraci (nebo smyčky), aby umožnila vašemu robotu dokončit náročnější úkoly, i když se prostředí změní.
- Sekvence je pořadí, ve kterém jsou příkazy prováděny, jeden po druhém. Kdykoli studenti kódují robota 123, seřadí karty kodéru ve správném pořadí, aby dosáhli svého cíle.
- Výběr se týká použití dat senzorů k rozhodnutí v rámci projektu. K tomu dochází, když studenti kódují robota 123, aby použil data z očního senzoru, jako to dělají v laboratořích 2 s kartou kodéru „Drive till object“ a v laboratoři 3, když kódují robota, aby provedl různé chování na základě barvy detekovaného objektu.
- Iterace je opakování chování v projektu. Studenti vytvoří „smyčku“ (nebo iteraci) ve svých projektech, když přidají kartu kodéru „Přejít na začátek“, aby svůj projekt zopakovali, jak to dělají v laboratoři 3.
Sekvence - Jak se v této jednotce používá sekvenování?
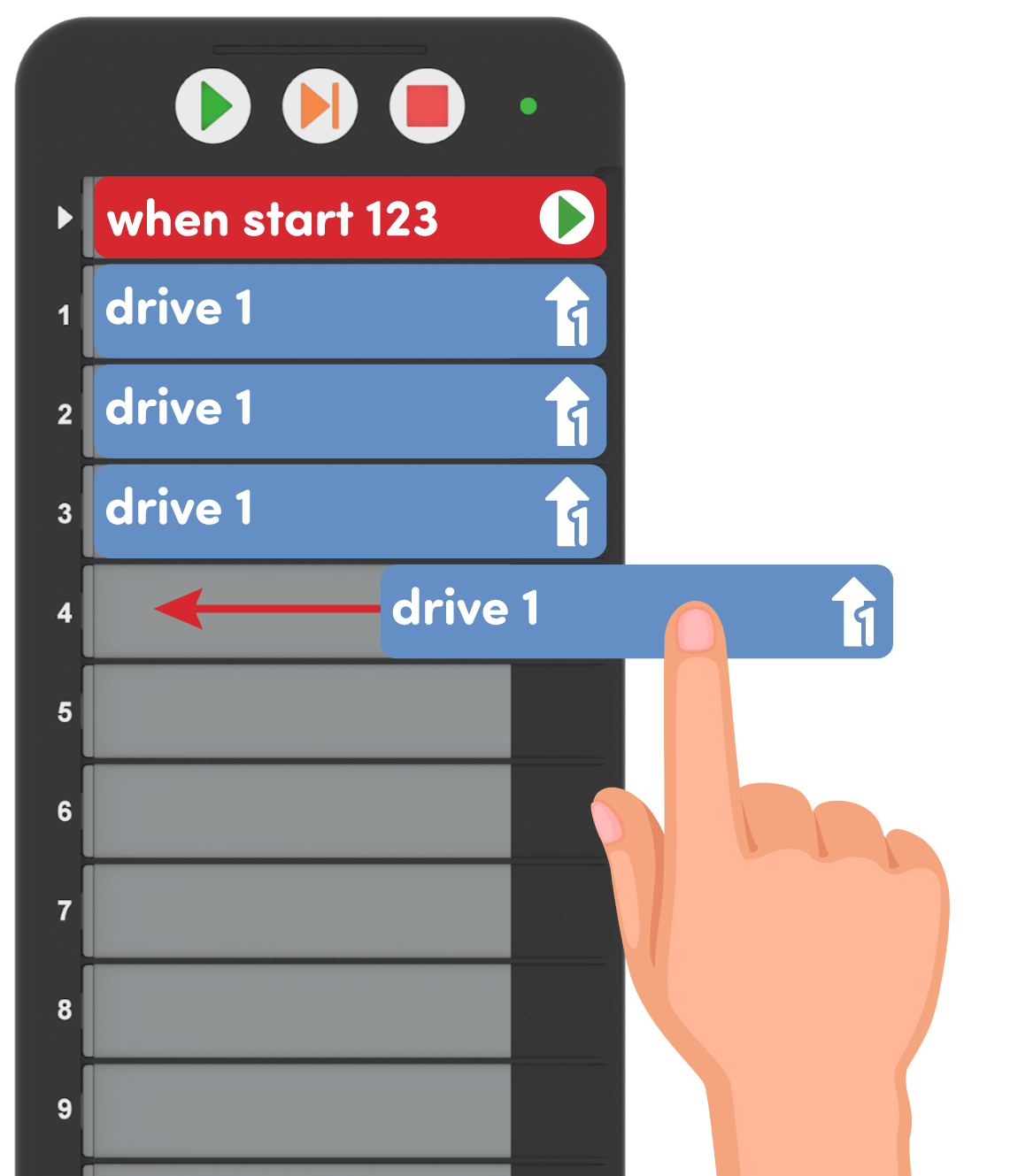
Sekvence je pořadí, ve kterém jsou karty kodéru prováděny v projektu. Karty kodéru začínají vložením karty v horní části kodéru a poté se postupně pohybují dolů.
V této animaci můžete vidět, jak projekt začíná kartou „When start 123“ v horní části kodéru, poté je každá karta kodéru spuštěna v pořadí shora dolů. Robot 123 pohání dopředu čtyři mezery na poli 123. Zelená zvýrazňovací funkce na levé straně kodéru označuje, která jednotlivá karta kodéru je v daném okamžiku spuštěna. To může studentům poskytnout okamžitou zpětnou vazbu k propojení chování robota 123 se specifickými kartami kodéru.
Kroky pro plánování a sekvenování kodérových karet v projektu
-
Nejprve identifikujte cíl - co je třeba udělat? Například od začátku dojeď k babičce.
- Poté rozeberte kroky potřebné k dosažení cíle a identifikujte karty kodéru potřebné k dosažení těchto kroků. Zde budete muset postoupit o čtyři kroky dopředu, abyste se dostali k domu babičky. Toho lze dosáhnout pomocí čtyř karet „Drive 1“.
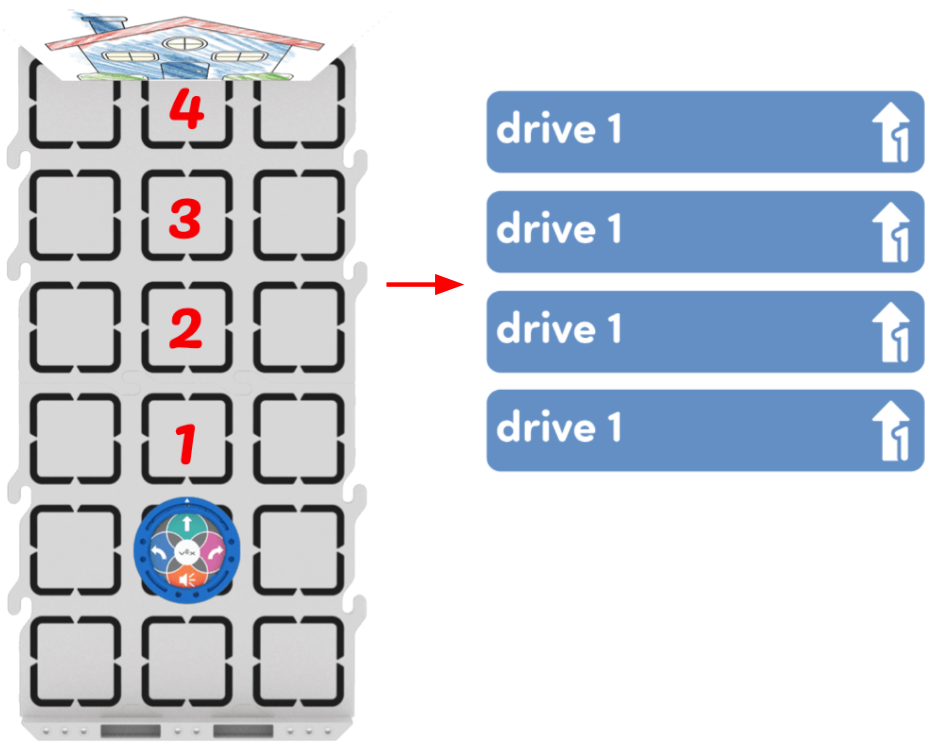
- Dále naplánujte sekvenci projektu rozložením kodérových karet na stůl. Jakmile jste spokojeni s jejich projektovým plánem, vložte karty kodéru do kodéru od shora dolů.
- Vyberte „Start“ pro otestování projektu a zjistěte, zda robot 123 dosáhne cíle uvedeného v prvním kroku.

Pokud chcete změnit svůj projekt, jednoduše vyjměte karty kodéru z kodéru, uspořádejte karty a vložte je zpět do kodéru, abyste aktualizovali svůj projekt.
Výběr - Co je senzor?
Senzor je v podstatě zařízení, které pomáhá robotovi porozumět okolnímu světu. Dělá to shromažďováním a vykazováním údajů o svém prostředí, které pak mohou být použity v projektu k rozhodování robota nebo k provádění určitých chování. Tuto sekvenci lze považovat za smyčku rozhodování Sense → Think → Act.
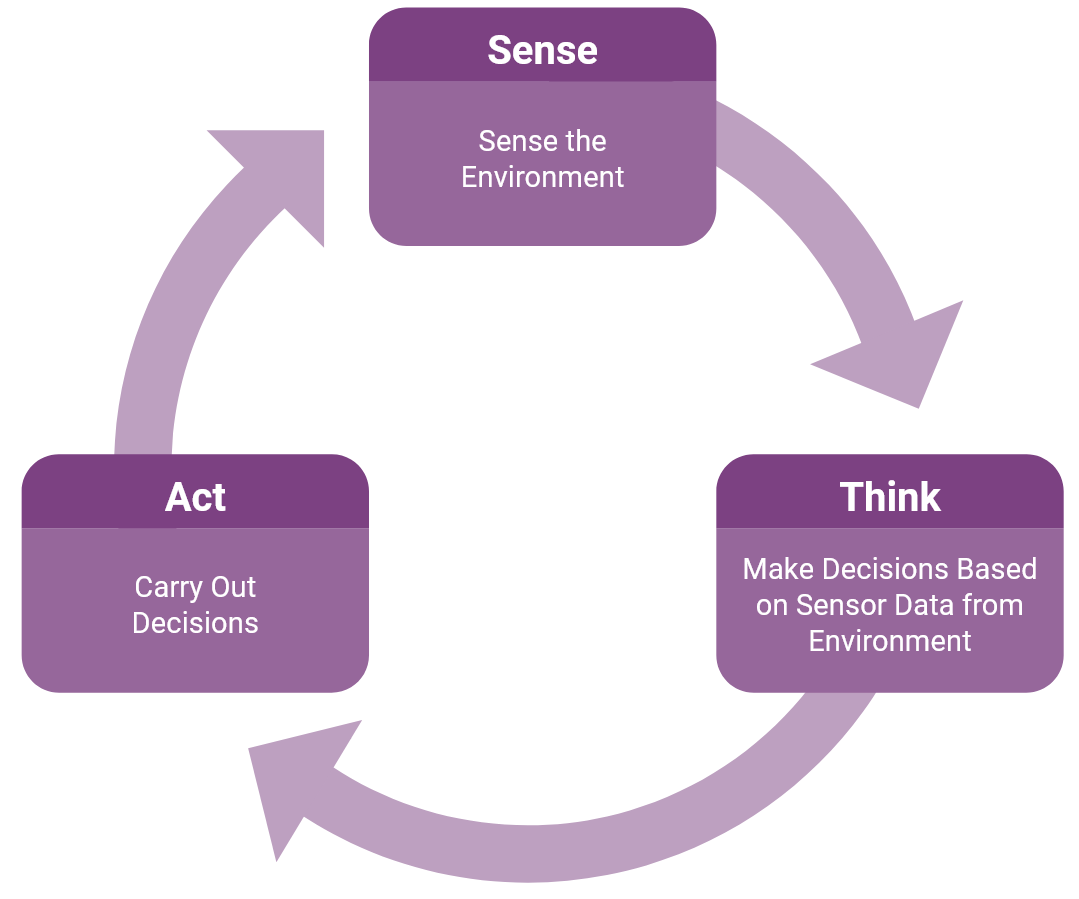
Robot 123 používá senzory ke shromažďování dat ze svého okolí (Sense), rozhodování na základě těchto informací (Think) a přeměně těchto informací na pokyny pro chování (Act).
V této jednotce studenti naprogramují robota 123, aby detekoval vlka na cestě k domu babičky. Studenti projektu vytvoří rozhodovací smyčku Sense → Think → Act, protože oční senzor „detekuje“ přítomnost objektu („vlk“), poté „přemýšlí“ nebo se rozhodne zastavit jízdu, když je objekt detekován, a pak robot 123 bude jednat a přestane se pohybovat vpřed.
Co je to oční senzor?
Oční senzor na robotu 123 je umístěn na přední straně pod bílou šipkou. Oční senzor lze použít k detekci přítomnosti nebo nepřítomnosti objektu, stejně jako jeho barvy nebo úrovně jasu.

V této jednotce bude oční senzor použit k detekci, kdy je objekt (babiččin dům nebo vlk) přítomen v cestě robota 123. Poloha očního senzoru na robotu 123 znamená, že může detekovat pouze objekty přímo před ním. Mějte to na paměti, když umisťujete svých 123 robotů a vlků se svými studenty tak, aby materiály připravovaly studenty na úspěch.

Další informace o tom, jak kódovat oční senzor s kodérem, naleznete v článku Kódování očního senzoru VEX 123 pomocí knihovny Coder VEX.
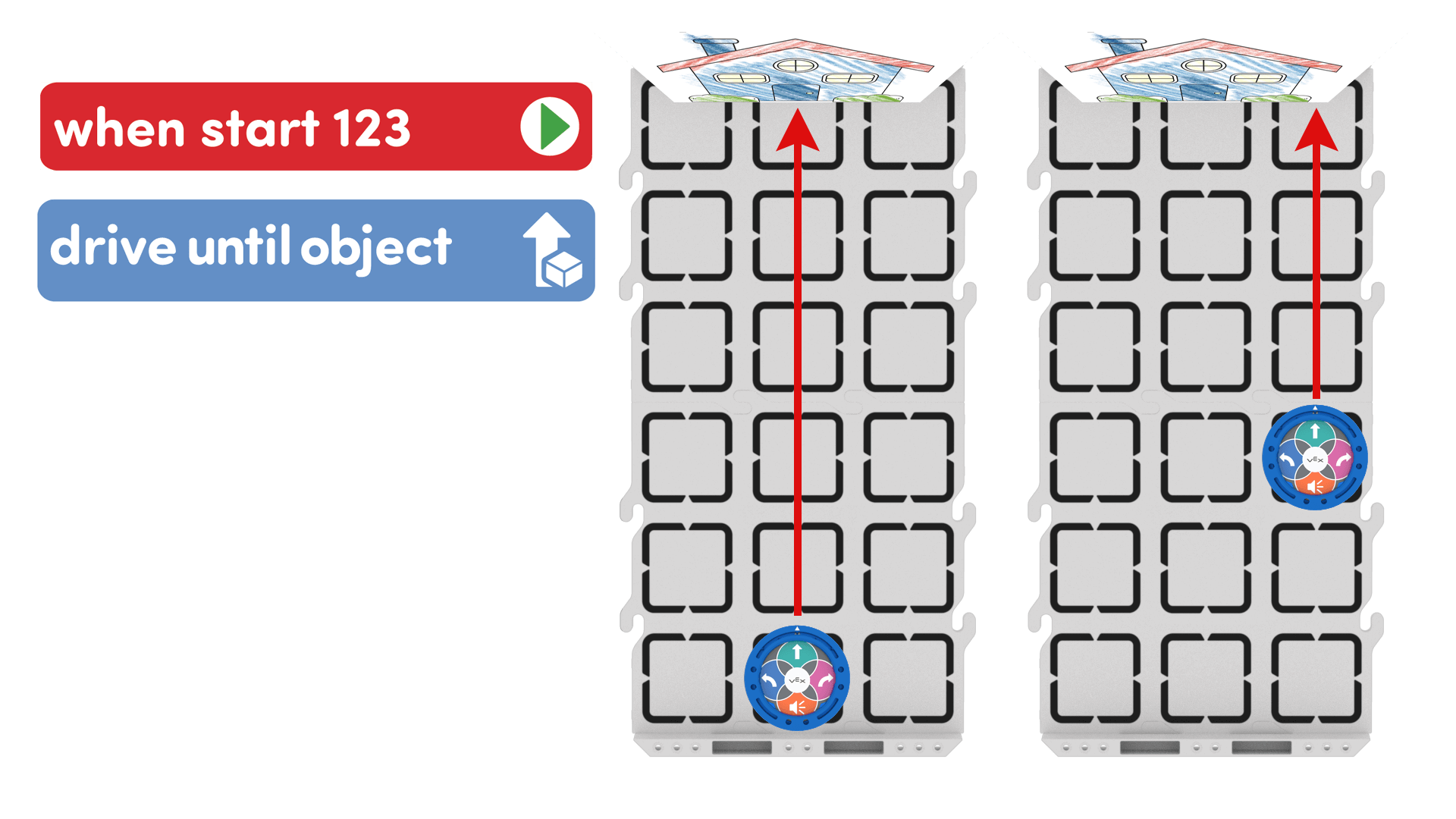
Jak funguje karta kodéru „Drive until object“?
Karta kodéru „Drive until object“ používá data z očního senzoru k tomu, aby se robotický pohon 123 pohyboval vpřed, dokud oční senzor nehlásí, že je detekován objekt. Když je detekován objekt, robot 123 přestane řídit.
![]()
To je užitečné v případě projektu, kdy přesná poloha objektu nebo překážky není známa nebo ji nelze naplánovat. V této jednotce studenti nejprve použijí kartu kodéru „Drive till object“, aby zjistili, že robot 123 může úspěšně přijet do domu babičky se stejným projektem bez ohledu na to, kde začíná svou cestu.
Jak fungují karty kodéru „Pokud červená“, „Jiný“ a „Konec, pokud“ dohromady?
Tyto kodérové karty lze použít k vytvoření projektu, kde robot používá data o detekované barvě pro rozhodnutí a provádí různé chování na základě detekované barvy.
V laboratoři 3 studenti použijí barvu detekovaného objektu ke kódování robota 123, aby vystrašili červeného vlka nebo zazvonili u dveří babiččina domu. Ta je strukturována pomocí karet kodéru „If red“, „Else“ a „End if“. Tyto karty společně vytvářejí podmíněný výrok. Podmíněný příkaz se používá k provedení konkrétní sekvence pokynů, pokud je podmínka splněna (reporting TRUE), a další sada pokynů, pokud podmínka splněna NENÍ (reporting FALSE), čímž se „rozvětví“ tok projektu. Při spuštění projektu bude provedena pouze jedna větev podmíněného příkazu, což způsobí, že se robot rozhodne. V laboratoři 3 je podmínkou, která se kontroluje, podmínka, že je červená (karta kodéru „If red“). Zjištěný objekt bude buď hlášen jako červený (TRUE), nebo jako nečervený (FALSE).

Výše uvedený obrázek ukazuje rozhodovací proces a jak větvení pracuje s projektem. "End if" se používá k ukončení podmíněného prohlášení a signalizuje, že rozhodovací část projektu je dokončena - to je konec rozhodovacího procesu if. Jakékoli příkazy přidané po této kartě budou dokončeny po provedení rozhodnutí.

Tato animace zobrazuje projekt z laboratoře 3. Podívejte se na zvýraznění na kodéru, abyste zjistili, jak se tok projektu pohybuje při rozhodování.
Iterace - Jak funguje karta kodéru „Přejít na začátek“?
Karta kodéru „Přejít na začátek“ vytvoří věčnou smyčku, což způsobí, že se projekt vrátí na kartu kodéru „Při spuštění 123“ a opakuje chování v pořadí navždy, dokud se projekt nezastaví.
To je užitečné v projektu, který způsobuje, že robot neustále opakuje stejné chování nebo dělá stejné rozhodnutí znovu a znovu. V laboratoři 3 je po detekci objektu a rozhodnutí umístěna karta kodéru „Přejít na začátek“. Tím se toto rozhodování opakuje znovu a znovu, čímž se vytváří projekt a algoritmus.
Strategie pro výuku s kodérem v této jednotce
Kodér nabízí studentům a učitelům příležitost snadno a hmatatelně se zapojit a sdílet kód během činností laboratoře.
Podpora předčtenářů nebo raných čtenářů — Karty kodéru jsou navrženy tak, aby podporovaly předčtenáře nebo rané čtenáře, pomocí ikon, které představují slova samotné karty, takže studenti mohou v podstatě číst obrázky, pokud ještě nemohou číst slova. Povzbuzujte studenty, aby používali tyto obrázky ikon, které jim pomohou při práci na jejich projektech. Posilte to odkazem na obrázky na kartách Coder, když je pojmenováváte se studenty, jako například „Karta When start 123 Coder, ta se zelenou šipkou, jde vždy první.“

Snadná kontrola a sdílení kódu — Jakmile jsou karty kodéru vloženy do kodéru, studenti mohou zvednout svůj kodér, aby ukázali svůj kód, stejně jako by drželi tabuli s matematickým řešením. Tuto strategii používejte během skupinové výuky jako prostředek ke kontrole přesnosti studentů před zahájením jejich projektů. Můžete rychle a snadno zjistit, zda jsou použity správné karty kodéru, zda jsou vloženy ve správném pořadí, a ujistěte se, že nejsou vzhůru nohama nebo dozadu. Při kontrole se skupinami, abyste usnadnili nezávislou aktivitu, se podívejte na kodéry a karty kodérů, abyste zkontrolovali pokrok.
Další informace o používání kodéru jako výukového nástroje naleznete v tomto článku v knihovně VEX.
Jaké kodérové karty potřebujete?
Karty kodéru představují 123 příkazů robota, které jsou vloženy do kodéru a použity ke kódování robota 123. Níže je uveden seznam hlavních kodérových karet použitých během této jednotky. Podrobnější informace o organizaci a distribuci karet kodéru studentům naleznete v části Nastavení prostředí v souhrnu v každé laboratoři.
| Karta kodéru | Chování | Příklad |
|---|---|---|
 |
Spustí projekt po stisknutí tlačítka „Start“ na kodéru. | |
 |
123 Robot pojede dopředu o 1 délku robota. To se rovná 1 čtverci na poli 123. |  |
 |
123 Robot bude pohánět dopředu 2 délky robota. To se rovná 2 čtvercům na poli 123. |  |
 |
123 Robot posune dopředu 4 délky robota. To se rovná 4 čtvercům na poli 123. |  |
 |
123 Robot pojede dopředu, dokud oční senzor nezjistí objekt. |  |
 |
Používá oční senzor ke kontrole, zda je detekována červená barva. | |
 |
Používá se společně s kartou kodéru „If“. Karta kodéru „Else“ spustí karty kodéru pod „Else“, pokud není splněna podmínka karty kodéru „If“. | |
 |
Ukončí sekvenci 'If' a 'Else' kodérových karet | |
 |
Kodér se vrátí zpět na kartu kodéru „Při spuštění 123“ a bude pokračovat v běhu projektu. |
Nabídněte studentům další kodérské karty z kategorií Vzhledy nebo Zvuky, aby rozšířili své projekty a odehnali vlka ve hře část 2 laboratoře 2. Úplný seznam karet kodéru a jejich chování naleznete v článku VEX Coder Card Reference Guide VEX Library.
Řešení problémů s očním senzorem v laboratoři 3
Pokud váš projekt v laboratoři 3 neprobíhá podle plánu, problém může spočívat ve způsobu, jakým oční senzor detekuje objekty a jejich barvy ve vaší třídě. Před řešením problémů s očním senzorem může být užitečné trochu porozumět tomu, jak funguje, pokud jde o detekci barev.
Oční senzor detekuje „hodnotu odstínu“, která se zarovnává s barvou, nikoli konkrétně s „barvou“. Existuje mnoho odstínů červené, modré a zelené a každý má svou vlastní hodnotu odstínu. Barvy, které jsou hlášeny jako detekované senzorem, jsou ve skutečnosti rozsahy hodnoty odstínu, které korelují s „červenou“, „modrou“ nebo „zelenou“. Oční senzor detekuje hodnotu odstínu objektu před ním, a pokud tato hodnota spadá do rozsahu zarovnaného na „červenou“, „modrou“ nebo „zelenou“, pak je barva vykázána jako taková.
Existuje několik strategií řešení problémů, které můžete také zkusit, aby projekt fungoval tak, jak bylo zamýšleno.
- Nastavte okolní světlo - Oční senzor na robotu 123 je citlivý na světlo. Pokud je okolní světlo v místnosti tmavé nebo vyzařuje žlutý odstín, může to ovlivnit barevné hodnoty očního senzoru. Zkuste přesunout nastavení do světlejšího prostoru ve třídě nebo rozsvítit další světla, abyste zjistili, zda to robotovi pomůže rozpoznat barvy přesněji.
- Otestujte detekci barev pomocí jiného robota 123 - Hodnoty „červená“, „zelená“ a „modrá“, které detekuje senzor očí, jsou zarovnány s hodnotami červeného, zeleného a modrého odstínu 123 robotů. Nahraďte červeného vlka červeným robotem 123 a spusťte projekt. Pokud projekt nyní běží podle plánu, ujistěte se, že barva Vlka je stejná nebo podobná červenému odstínu robota 123.
- Otestujte detekci barev pomocí aplikace Učebna - Se zapnutým robotem 123 otevřete aplikaci Učebna, vyberte robota, kterého testujete, a vyberte „Zobrazit informace o zařízení“. Při otevřených informacích o zařízení je prvním senzorem zobrazujícím data oční senzor. Oční senzor hlásí barvu, kterou senzor detekuje (červená, modrá, zelená nebo N/A), a hodnotu odstínu detekuje ve stupních. Umístěte robota 123 před červeného vlka a podívejte se, jaká barva a hodnota odstínu jsou hlášeny v aplikaci Učebna.
- Pokud hlášená barva není „červená“, nejprve vyměňte červeného vlka za červeného robota 123 a zjistěte, zda robot hlásí červenou barvu. Pokud ano, upravte barvu červeného vlka tak, aby lépe odpovídala červenému robotu, a použijte údaje z aplikace Učebna, které vám v tomto procesu pomohou.
- Můžete také zkusit upravit okolní osvětlení ve třídě, abyste zjistili, zda to také pomůže přesnějšímu čtení barev.
- Další informace naleznete v článku Řešení potíží s robotem 123 v aplikaci Učebna.
- Další kroky a informace k řešení potíží naleznete v článku Řešení potíží se senzory VEX 123.