
Pozadí
V této kódovací jednotce se studenti seznámí s iterativním procesem návrhu. Studenti prozkoumají, jak vyřešit skutečný problém znečištění oceánů vytvořením rozšíření ze stavebnice VEX GO, které bude sbírat odpadky. Každá lekce v této jednotce končí analýzou silných a slabých stránek dané přístavby a nápady na vylepšení jejího dalšího návrhu.
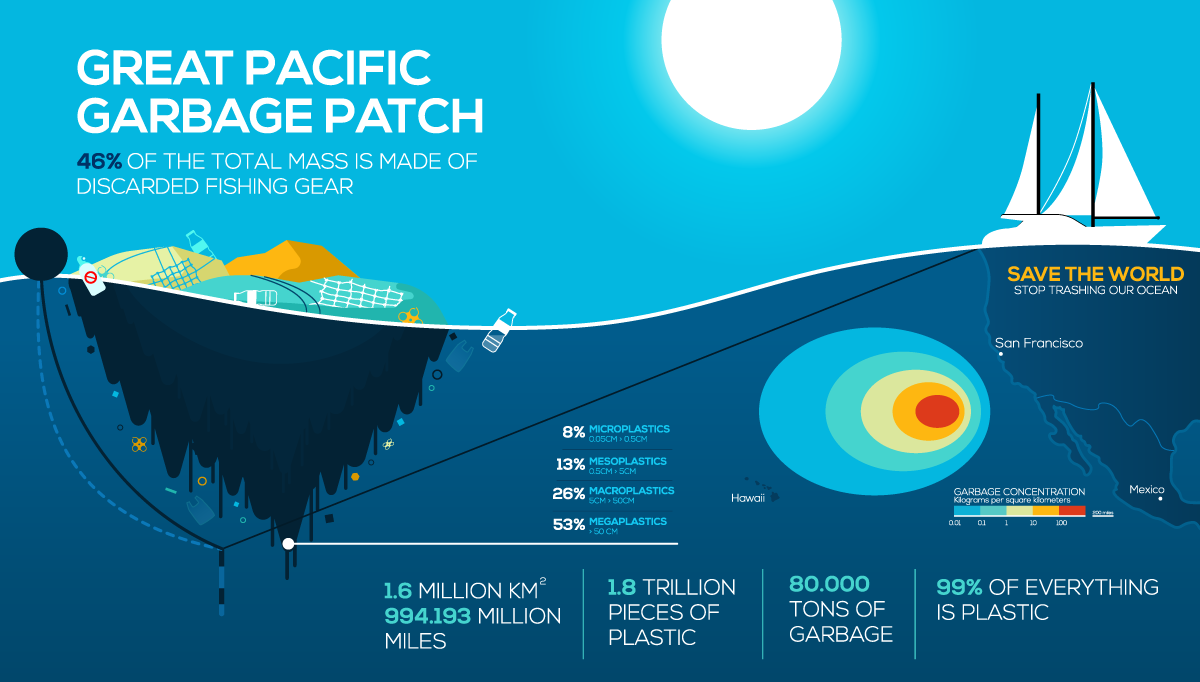
Co je Velká tichomořská odpadková skvrna?
Velká tichomořská odpadková skvrna je masa odpadků, která roste každý den. Tato skvrna se nachází někde v Tichém oceánu mezi Havají a Kalifornií a odhaduje se, že se rozkládá na ploše dvakrát větší než Texas. Odpadky se vznášejí v jedné pevné masě plastu, kovu a dalších materiálů, přičemž za jejich okrajem se vznášejí sypké trosky. V této lekci mají studenti za úkol vytvořit rozšíření pro svého robota z Code Base, které pomůže s úklidem suti z oblasti Velké tichomořské odpadkové skvrny.
Proces inženýrského návrhu
Studenti použijí proces inženýrského návrhu (EDP) k návrhu a výrobě příslušenství pro svého robota s kódovou základnou. EDP je série kroků, které inženýři používají k nalezení řešení problémů. Řešení často zahrnuje návrh produktu, který splňuje určitá kritéria nebo plní určitý úkol.
EDP lze rozdělit do následujících kroků: DEFINOVAT → VYVINOUT ŘEŠENÍ → OPTIMALIZOVAT.
- Definování inženýrských problémů zahrnuje co nejjasnější stanovení problému, který má být vyřešen, z hlediska kritérií úspěchu a omezení nebo limitů.
- Navrhování řešení inženýrských problémů začíná generováním řady různých možných řešení a následným vyhodnocením potenciálních řešení, aby se zjistilo, která z nich nejlépe splňují kritéria a omezení problému.
- Optimalizace návrhového řešení zahrnuje proces, ve kterém jsou řešení systematicky testována a zdokonalována a konečný návrh je vylepšen kompromisem mezi méně důležitými prvky a těmi, které jsou důležitější.
EDP má cyklický nebo charakter. Je to proces výroby, testování, analýzy a zdokonalování produktu nebo procesu. Na základě výsledků testování se vytvářejí nové iterace a dále se upravují, dokud není konstrukční tým s výsledky spokojen.
V této lekci studenti použijí EDP k vymyšlení, naplánování a stavbě vozu pro přehlídku. Po počátečním sestavení skupiny otestují a vylepší svůj základní návrh tak, aby splňoval kritéria a omezení návrhu. Jedná se o stejný proces inženýrského návrhu, který je zahrnut v standardech NGSS (Next Generation Science Standards).
Sekvenování
Sekvence je specifické pořadí, ve kterém jsou chování prováděna. Akce nebo událost vede k další seřazené akci v posloupnosti. Sekvence je důležitá, aby studenti mohli správně naprogramovat své roboty.
Aby bylo možné robotovi přesně a přesně sdělit, jak se má pohybovat, je zapotřebí jak dekompozice, tak sekvenování. Zaprvé, problém, například jak se orientovat v bludišti, bude rozložen na menší části a chování. Jakmile jsou tyto vzorce chování identifikovány, je třeba je uspořádat do správné posloupnosti. To je důležité, protože robot se bude pohybovat přesně tak, jak je naprogramován.
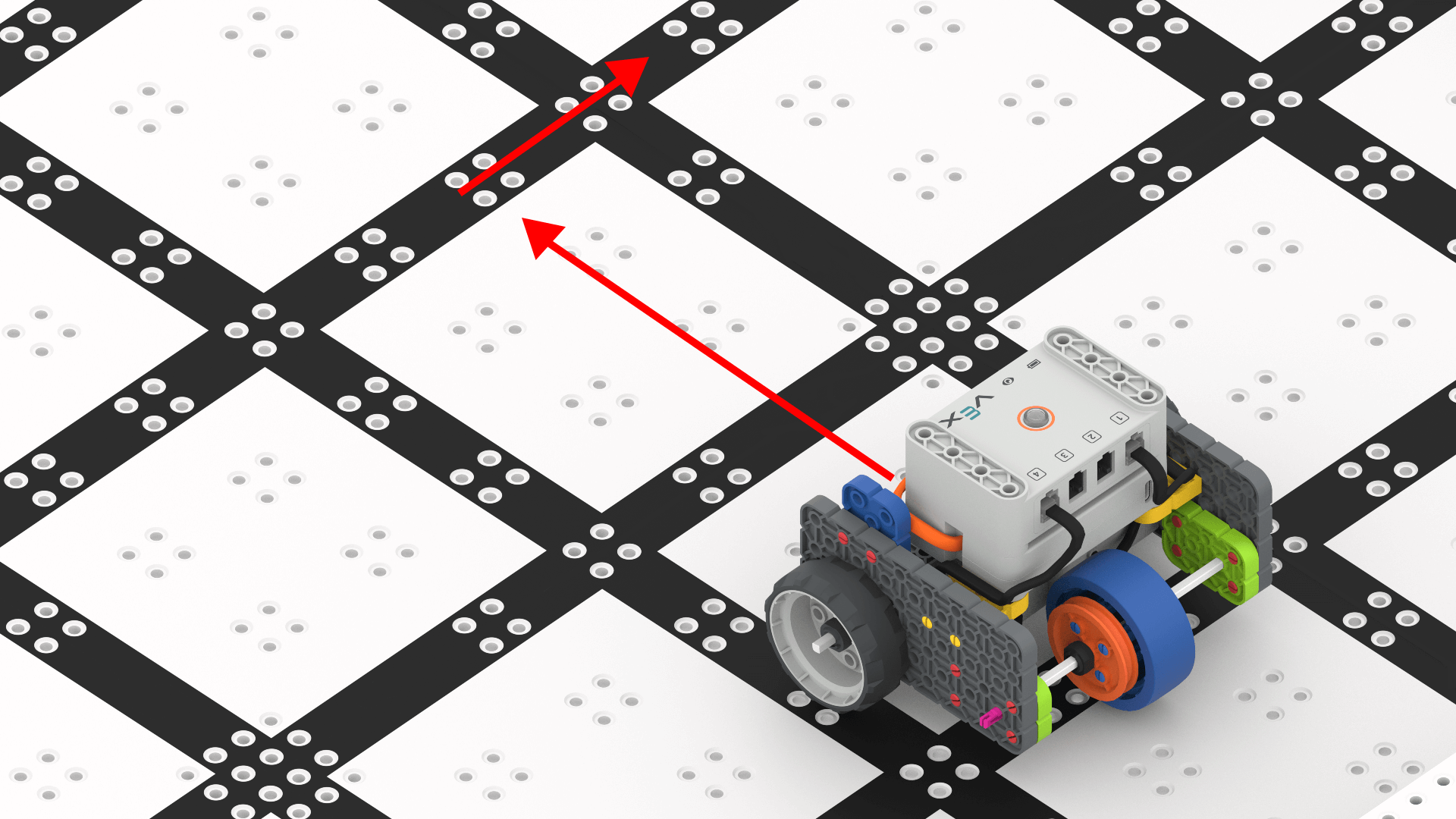
Studenti si naprogramují svou kódovou základnu, aby se mohli pohybovat po oblasti úkolů a sbírat předměty. Budou muset seřadit příkazy ve svém projektu tak, aby se jejich kódová báze pohybovala vpřed, vzad, vlevo a vpravo ve správném pořadí, aby se mohli v dané oblasti orientovat.
- Pohyb vpřed
- Odbočte doprava
- Pohyb vpřed
Rozklad
Dekompozice zahrnuje rozložení složitého problému na chování, které je lépe zvládnutelné a snáze pochopitelné. Rozdělení problému na menší části znamená, že každou část lze podrobněji prozkoumat a snáze vyřešit. Například pokud chce student, aby se jeho robot pohyboval ve čtverci, musel by ho rozdělit na menší příkazy. Pro studenty je důležité si procvičit zdokonalení procesu rozkladu, protože zpočátku nemusí rozdělit příkazy na menší komponenty:
| Pohyb ve čtvercovém rozpisu 1 | Pohyb ve čtvercovém rozpisu 2 | Pohyb ve čtvercovém rozpisu 3 |
|---|---|---|
|
|
|
Co je pseudokód?
Pseudokód je zkrácený zápis pro kódování, který kombinuje verbální a písemné popisy kódu.
Studenti si často mohou najít řešení pomocí „hádání a kontroly“. To však nevede k tomu, že si vybudují koncepční porozumění programovacím konceptům. Psaní pseudokódu pomáhá studentům překonat povrchní znalosti programování a dosáhnout koncepčnějšího porozumění. Pseudokód vyžaduje, aby studenti koncepčně promysleli své programovací řešení, než začnou s programováním. Učitelé by měli se studenty diskutovat o pseudokódu tím, že se jich zeptají:
- Čeho chtějí svým projektem dosáhnout?
- Jak chcete rozdělit záměr nebo cíl projektu do krátkých konkrétních prohlášení?
V tomto příkladu, pokud by studenti měli vytvořit pseudokód, který by robota upravil tak, aby se pohyboval vpřed, detekoval zeď, otočil doprava a poté se znovu pohyboval vpřed, vypadal by takto:
- Posuňte robota dopředu, dokud nebude 50 mm od zdi
- Zastavte robota
- Otočte robota o 90 stupňů
- Zastavte robota
- Pohon vpřed 600 mm
Jakmile je vytvořen pseudokód, studenti následně vytvoří programovací kód, který robota instruuje, jak úspěšně dokončit každý krok pseudokódu.
Co je to chování robotů?
„Chování“ je velmi pohodlný způsob, jak hovořit o tom, co robot dělá a co musí dělat. Pohyb vpřed, zastavení, otáčení, hledání překážky – to vše jsou projevy chování.
Jakmile studenti začnou s kódováním, měli by také začít přemýšlet o chování robota. Při programování by studenti měli postupovat podle těchto kroků:
- Vytvořte plán, jak robot provede požadovanou akci.
- Identifikujte chování v rámci plánu a snažte se toto chování co nejvíce omezit.
- Převeďte tento plán do projektu, který může robot sledovat.
Plán bude jednoduše posloupností chování, které musí robot dodržovat, a projekt bude pouze toto chování přeložené do VEXcode GO.
Rozdělení úkolů na menší části chování a následné vytváření řešení s využitím těchto chování je dovednost, kterou lze uplatnit v mnoha různých oblastech.
Co je VEXcode GO?
VEXcode GO je kódovací prostředí, které se používá ke komunikaci s roboty VEX GO. Studenti používají rozhraní drag and drop k vytváření projektů VEXcode GO, které ovládají akce jejich robotů. Účel každého bloku lze identifikovat pomocí vizuálních podnětů, jako je jeho tvar , barva a označení.
V této jednotce budou použity následující bloky GO z VEXcode:
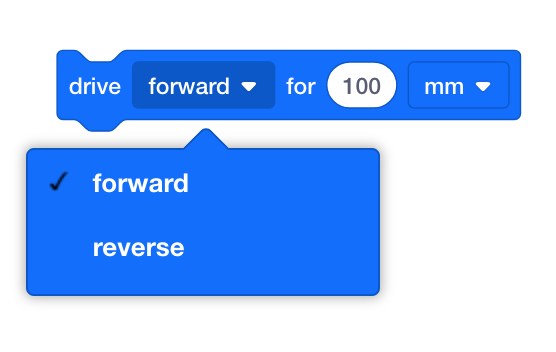
[Jezdit po dobu] - pohybuje hnacím ústrojím vpřed nebo vzad o danou vzdálenost. Zvolte směr, kterým se bude hnací ústrojí pohybovat, a nastavte, o kolik se bude pohybovat, zadáním hodnoty do oválu.
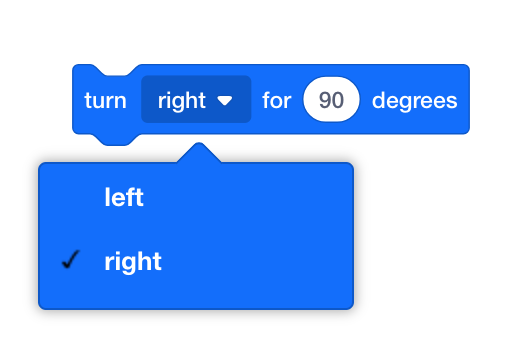
[Otočit o] - otočí hnací ústrojí doleva nebo doprava o daný počet stupňů. Zvolte směr otáčení hnacího ústrojí a nastavte, o kolik se bude pohybovat, zadáním počtu stupňů do oválu.
[Komentář] - umožňuje programátorům psát informace, které pomohou popsat jejich projekt. Komentáře nemění projekt ani bloky, které ho obklopují.

Chcete-li začít používat VEXcode GO ve své třídě, stáhněte si aplikaci VEX Classroom do zařízení učitele a poté postupujte podle kroků v článku Používání aplikace VEX Classroom , kde se dozvíte, jak aktualizovat firmware GO Brain, přejmenovat a vyhledat GO Brains a sledovat baterie GO Brains ve vaší třídě. For more information about VEXcode GO, visit the VEXcode GO section of the VEX Library.