
Compete
Now that you have practiced using all four driver controls to drive your BaseBot, it is time to complete the Figure Eight Challenge.
In this video, a BaseBot is placed on the left side of the Field with a red and a blue Bucky Ball placed towards the right of the BaseBot on the field. The BaseBot then drives in a figure eight pattern around the Bucky Balls to complete the challenge.
Follow the steps in this document to play the Figure Eight Challenge.
Google Doc / .docx / .pdf
Once you have completed the Figure Eight Challenge, check in with your teacher. Ensure you have documented the results of the challenge in your engineering notebook.
Wrap Up Reflection
Now that you have tested all the Controller configurations and played the Figure Eight Challenge, it is time to reflect on what you have learned and done in this Lesson. Start a new page in your engineering notebook to begin your reflection.
Rate yourself as a novice, apprentice, or expert on each of the following concepts in your engineering notebook. Provide a brief explanation for why you gave yourself that rating for each concept:
- The differences between the four different driver control configurations
- Testing different driver configurations in order to get the fastest time in the challenge
- Collaborating with others during this Lesson
Use this table to help you determine which category you fall under.
| Expert | I feel that I fully understood the concept and could teach this to someone else. |
| Apprentice | I feel that I understood the concept enough to compete in the challenge. |
| Novice | I feel that I did not understand the concept and did not know how to complete the challenge. |
What is Next?
In this Lesson, you practiced driving your robot with the Controller and competed in the Figure Eight Challenge.
In the next Lesson, you will:
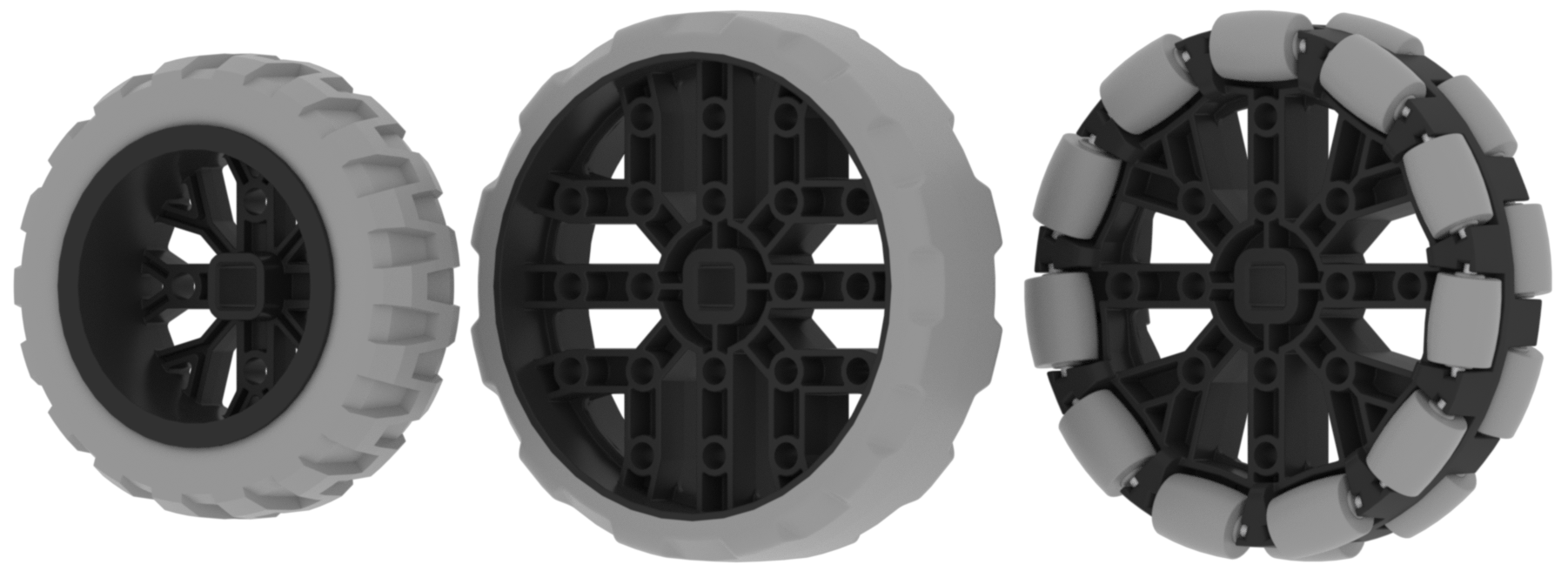
- Learn how to modify the build of your BaseBot by changing the wheels.
- Experiment with different wheels to see how they impact how your robot drives and turns.
- Compete in the Figure Eight Wheel Challenge!
Select < Return to Lessons to go back to the Lesson Overview.
Select Next Lesson > to continue to Lesson 3, and learn how to modify the build of your BaseBot by changing the wheels.