
Practice
In the last section, you learned about driver control programs, and selecting a joystick configuration to drive your robot. Now you are going to apply what you have learned to experiment with different driver control configurations to drive around a Buckyball in the quickest time.
Watch the video below to see how you can apply what you have learned to complete the Drive Around a Ball practice Activity.
Now it's your turn to complete the Drive Around a Ball practice activity!
In this video, a BaseBot is placed in the center square at the far left side of the field. A blue Buckyball is placed in the center of the square directly to its right. The BaseBot then drives in a rectangle around the Ball to complete the Drive Around a Ball practice activity.
Follow the steps in this document to learn more about how to complete this activity. Google Doc / .docx / .pdf
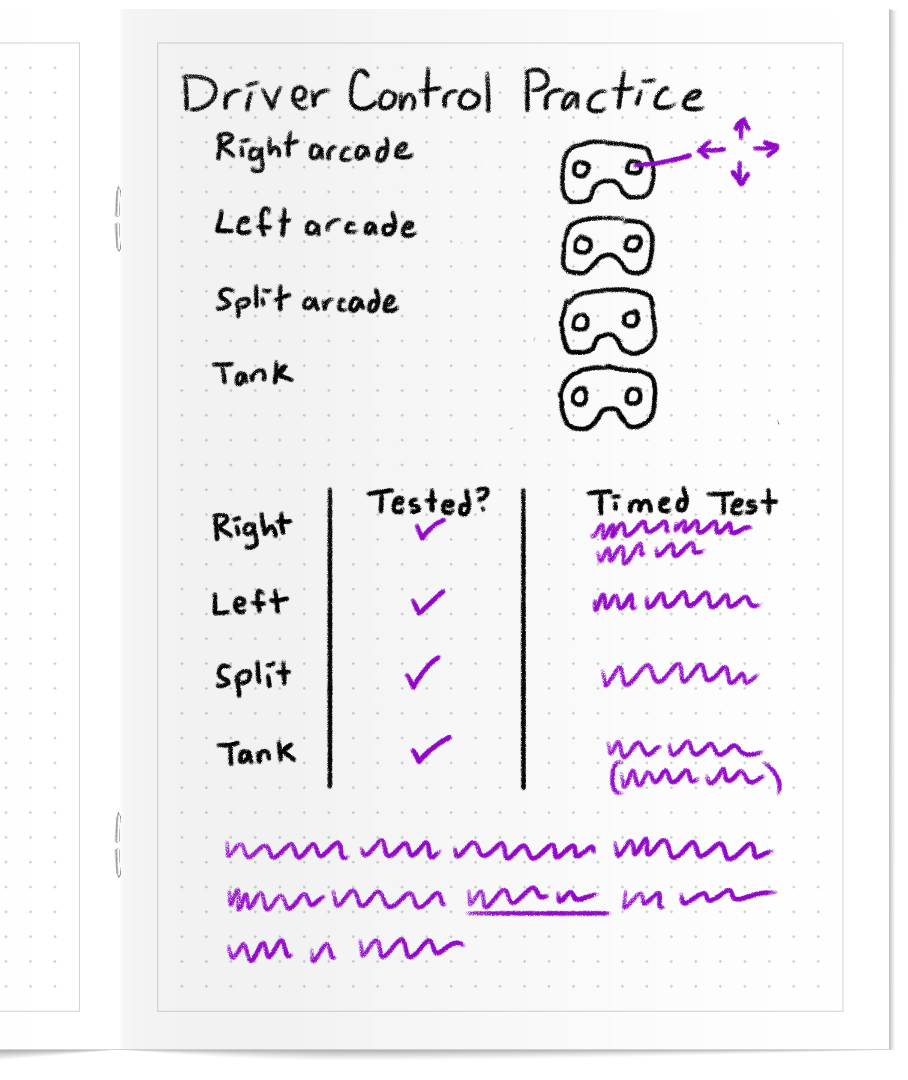
As you complete the Drive Around a Ball practice activity, document your findings in your engineering notebook. Think about which controller configuration you prefer and why as you record these findings.
View this image for an example of how you can record your results.
Now that you have completed the practice activity and chosen your preferred controller configuration, it is time to practice for the Drive a Figure Eight challenge.
Prepare for the Challenge
In Compete (on the next page), you will drive your BaseBot in a figure eight around two Buckyballs and the driver with the fastest time will win. Learn how to compete in the challenge, check your understanding, then practice for the challenge.
In this video, an EXP BaseBot is placed on the left side of the field with a red Buckyball placed in the center of the square directly to its right.A blue Buckyball is placed in the center of the square three squares to the right of the EXP BaseBot. The BaseBot then drives in a figure eight around the Bucky Balls to complete the challenge.
Follow the steps in this document to learn more about how to complete this activity.
Google Doc / .docx / .pdf
Check Your Understanding
Before beginning to play the challenge, ensure that you understand the rules and setup of the challenge by answering the questions in the document below in your engineering notebook.
Check Your Understanding questions Google Doc / .docx / .pdf
After completing the questions, try practicing the challenge.
Select Next > to compete in the challenge.