
Introduction to Robot Behaviors
![]() Teacher Toolbox
-
The Purpose of this Section
Teacher Toolbox
-
The Purpose of this Section
The goal of the Play section is for students to learn to program the Autopilot robot to drive forward and reverse by using the [drive] block. To begin the Play section, students are introduced to programming behaviors. Next, students will do an exploration where they will learn how to program the Autopilot to move forward and reverse. Read this page with students before moving onto the Forward and Reverse exploration. Use the Motivate a Discussion ( Google Doc / .docx / .pdf ) questions to review with students what basic behaviors are and why they are the building blocks to programming a robot.
![]() Teacher Toolbox
-
Robot Behaviors
Teacher Toolbox
-
Robot Behaviors
“Behaviors” are a very convenient way to talk about what the robot is doing, and what it must do. Moving forward, stopping, turning, looking for an obstacle… these are all behaviors.
As students begin the task of programming, they should also begin thinking about the robot’s actions in terms of behaviors. When students program, they should follow these steps:
-
First, they formulate a plan for the robot to perform the desired action.
-
Next, they translate that plan into a program that the robot can follow.
The plan will simply be the sequence of behaviors that the robot needs to follow, and the program will just be those behaviors translated into VEXcode IQ Blocks.
Breaking tasks down into smaller behaviors and then building solutions with those behaviors is a skill that can be applied to many different subjects. This is also an example of Computational Thinking. For more information on Computational Thinking, see here: https://k12cs.org/computational-thinking/
Programming Complexity
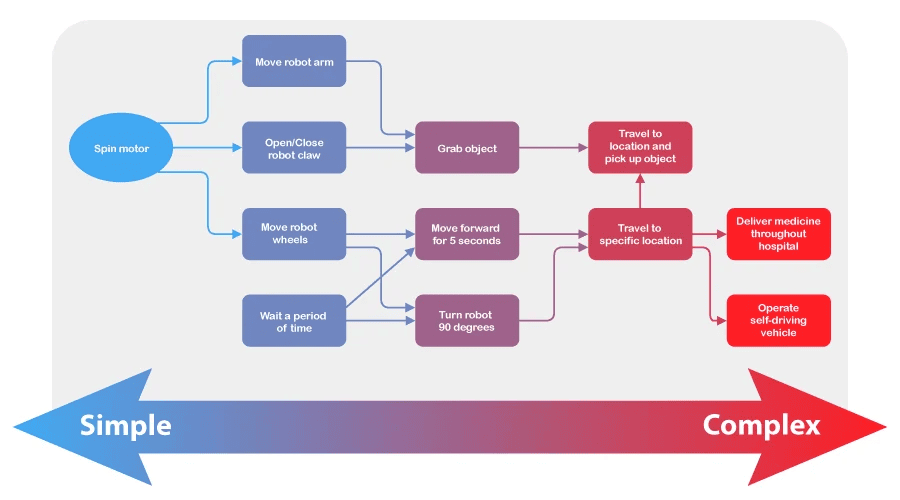
Robots can be designed to perform many different types of tasks. Some of these tasks are very simple, like opening an automatic door. Others are not so simple, like a robot moving around a warehouse to collect items for an order. No matter how complicated the task is, it can be broken down into simpler ones. These tasks are known as behaviors and are the building blocks of robotics programming.
A behavior is a way that a robot acts, and can range from basic to complex, depending on how the robot is built or programmed. A simple mobile robot like the Autopilot only has two motors, so its behaviors will involve turning those motors to accomplish its goals. With more design and coding, you can start from this basic behavior and do more complex behaviors.
![]() Motivate Discussion
-
Basic Driving
Motivate Discussion
-
Basic Driving
Q: Driving forward and reverse are basic behaviors which are important to master. Driving forward and reverse might be the first tasks you learn when you drive a car. Why do you think it’s important to learn these behaviors first?
A: Students could answer with a variety of responses, but the idea is that basic behaviors are important to learn first before more difficult behaviors are attempted. You can compare it to learning basic math addition and subtraction facts first before learning how to borrow and carry when adding larger numbers.
Q: List the types of units you may want to use to measure your robot's driven distance, either forward or in reverse. Note: any type of unit is acceptable!
A: Students could answer with any units of measurements they are familiar with such as inches, centimeters, feet, or meters. Students could also answer with units such as the length of a desk, a notebook, or the classroom.
![]() Extend Your Learning
-
Comparing Units of Measure
Extend Your Learning
-
Comparing Units of Measure
Here’s an example of an extra math activity. On the board, write all the units of measurement students respond with on the board. Ask students to then order the units on the board from smallest to largest. For example, think about an inch is larger than a centimeter but a foot is smaller than a desk. This example shows the importance of measurement relationships. Through these examples, students can make better estimations and judgements on distances later in this lab.