
관행
지난 섹션에서는 거리 센서를 사용하여 거리를 측정하고, 물체와 그 상대적 크기를 감지하고, 물체의 속도를 보고하는 방법을 알아보았습니다. 거리 센서가 작동하는 방식과 VEXcode EXP를 사용하여 코딩하는 방법을 알아보았습니다. 이 활동에서는 배운 내용을 로봇에 적용하여 버키볼을 찾아 필드 밖으로 밀어내는 코드를 작성합니다.
연습 활동에서는 VEX코드 EXP 프로젝트를 만들어 버키볼을 찾아 필드 밖으로 밀어내는 작업을 합니다. 이때 로봇 자체가 가장자리에서 떨어지지 않도록 주의해야 합니다. 버키볼의 시작 위치가 바뀌어도 로봇이 이 작업을 완료할 수 있도록 프로젝트를 반복합니다. 아래 영상을 시청하여 배운 내용을 적용하여 Push it Off 연습 활동을 완료하는 방법을 알아보세요.
이제 Push it Off 연습 활동을 완료할 차례입니다!
이 애니메이션에서 로봇은 버키볼 방향으로 돌아서서 그것을 향해 달려가서 필드 밖으로 밀어냅니다. 그런 다음 로봇과 버키볼이 재설정되고, 이번에는 버키볼의 위치가 달라집니다. 로봇은 버키볼을 향해 회전하여 필드 밖으로 밀어낸다. 이 애니메이션은 Push it Off 활동을 완료하기 위해 프로젝트를 만드는 방법의 한 가지 예를 보여줍니다.
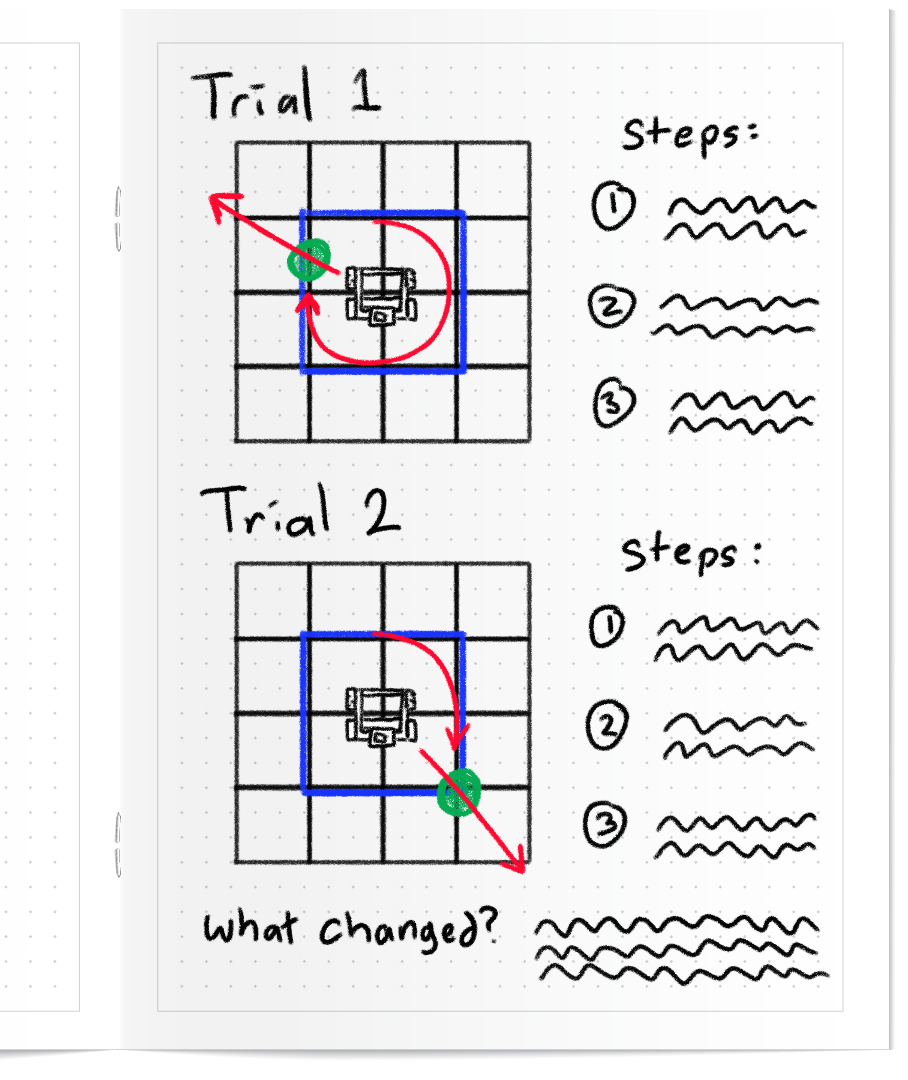
Push it Off 활동을 완료하면 엔지니어링 노트북에 프로젝트와 테스트를 기록하세요.
- 로봇이 활동을 완료하기 위해 어떻게 움직여야 하는지 보여주는 그림을 그려보세요.
- 귀하의 사진을 기반으로 프로젝트를 만드는 데 필요한 단계를 나열하세요.
- 각 반복 후에 변경한 내용을 문서화하세요.
프로젝트 아이디어와 테스트를 기록하는 방법에 대한 예는 왼쪽 이미지를 참조하세요.
경쟁(다음 페이지)에서는 로봇을 코딩하여 감지 및 쓸기 챌린지에서 가능한 한 빨리 4개의 버키볼을 필드 밖으로 떨어뜨리도록 해야 합니다. 도전 과제를 완료하는 방법을 알아보고, 이해도를 확인한 다음, 도전 과제를 위해 연습해 보세요.
이 챌린지의 목표는 로봇이 필드에서 떨어지지 않고 가능한 한 빨리 버키볼 4개를 모두 필드 밖으로 밀어내는 것입니다.
로봇이 감지 및 청소 챌린지를 완료하기 위해 어떻게 움직이는지 보여주는 애니메이션을 시청해 보세요.
이해도 확인
도전을 시작하기 전에 엔지니어링 노트북에 있는 아래 문서의 질문에 답하여 도전의 규칙과 설정을 이해했는지 확인하세요.
문제를 풀고 난 후, 과제를 연습해 보세요.
Sense and Sweep Challenge에 참여하려면 다음 > 선택하세요.