
Practice
In the last section, you learned how to use the Distance Sensor to measure distance, to detect objects and their relative size, and to report object velocity. You learned how the Distance Sensor works, and how to code it using VEXcode EXP. In this activity, you will apply what you've learned to code your robot to locate a Buckyball and push it off the Field.
In the practice activity, you will create a VEXcode EXP project to locate a Buckyball and push it off the Field, making sure that the robot itself does not fall off the edge. You will iterate on your project to ensure the robot can complete this task even if the Buckyball's starting position is changed. Watch the video below to see how you can apply what you have learned to complete the Push it Off practice activity.
Now it's your turn to complete the Push it Off Practice Activity!
In this animation, the robot turns in the direction of the Buckyball, drives towards it, and pushes it off the Field. Then the robot and Buckyball are reset, with the Buckyball in a different position this time. The robot rotates towards the Buckyball and pushes it off the Field. This animation shows one example of how a project can be created to complete the Push it Off activity.
Use this document as a reference to complete the practice activity.
As you complete the Push it Off activity, document your projects and tests in your engineering notebook.
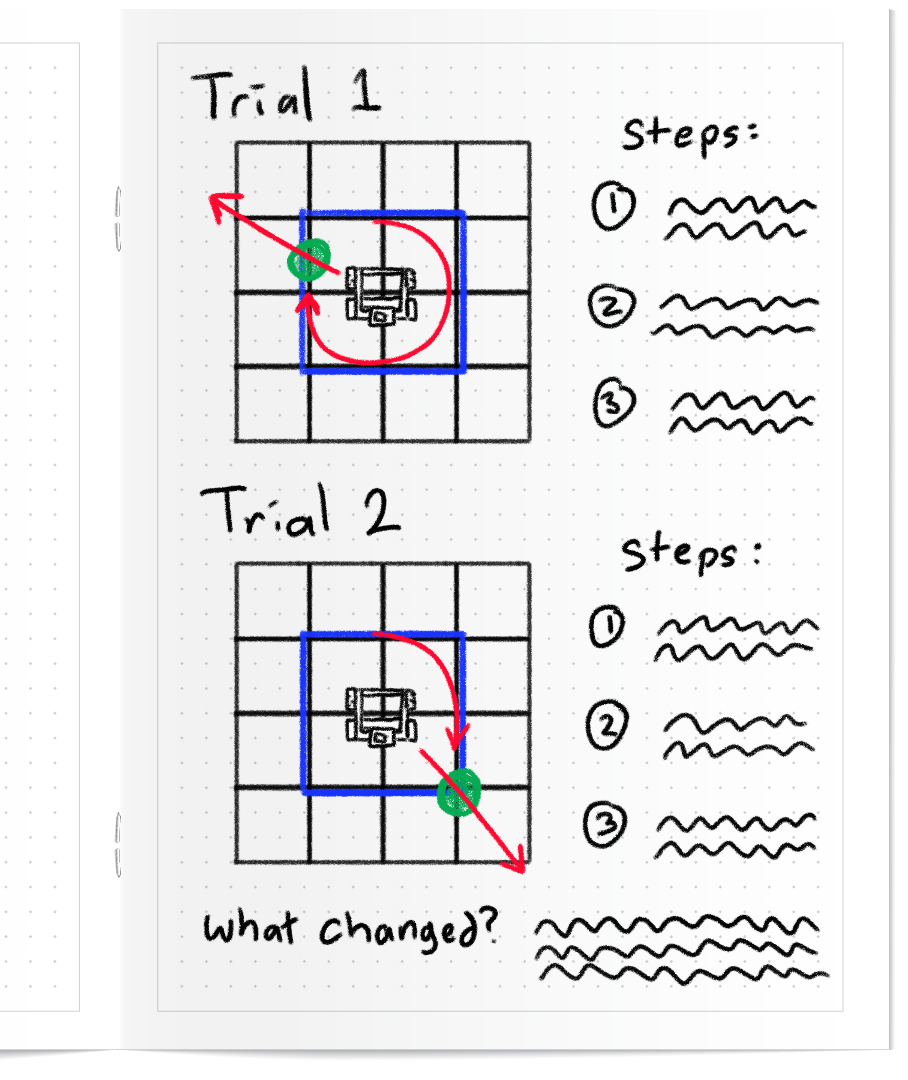
- Draw a picture to show how your robot should move to complete the activity
- List the steps needed to create a project based on your picture
- Document the changes you make after each iteration
See the image on the left for an example of how you can record your project ideas and tests.
In Compete (on the next page), you will code your robot to knock four Buckyballs off the Field as quickly as possible in the Sense and Sweep Challenge. Learn how to complete the challenge, check your understanding, then practice for the challenge.
The goal of this challenge is to have your robot push all four Buckyballs off the Field as quickly as possible, without falling off the Field.
Watch this animation to see an example of how your robot could move to complete the Sense and Sweep Challenge.
Follow the steps in this document to learn more about how to complete this challenge.
Check Your Understanding
Before beginning the challenge, ensure that you understand the rules and setup of the challenge by answering the questions in the document below in your engineering notebook.
Check Your Understanding questions >
After completing the questions, try practicing the challenge.
Select Next > to compete in the Sense and Sweep Challenge.