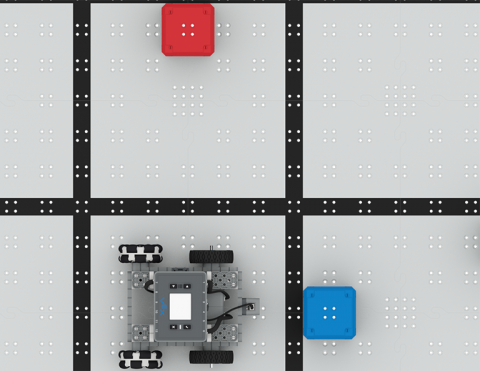
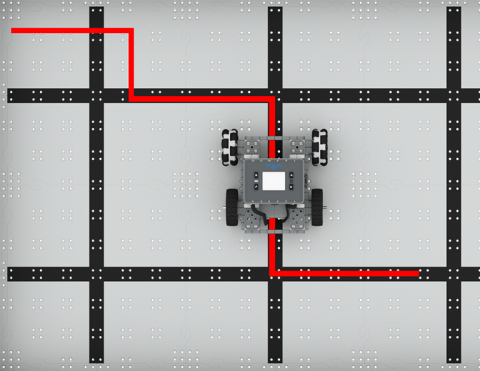
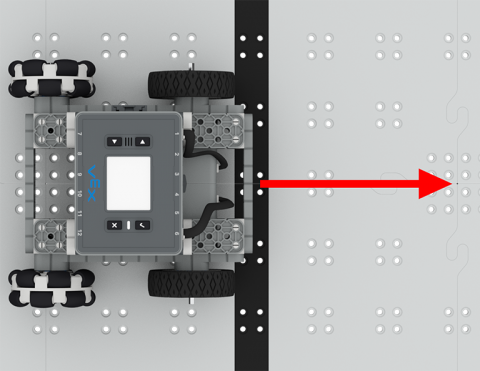
Užkoduokite „BaseBot“, kad galėtumėte keliauti į skirtingas vietas!
Activity Link
https://docs.google.com/document/d/10fHZNmlqW6cxcfjbBQoLwkax64teiVCMMPNSJ4EUlUM/edit?usp=sharing
Activity Image
Nuotrauka

VEX Platform
Subject
Builds
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Stop and Go.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Stop and Go.docx