
Voordat u begint
In deze module leren studenten meer over extra besturingselementen om de virtuele VEX AIR-drone te bewegen met behulp van de pitch- en yaw-besturing op de VEX AIR-dronecontroller. Ze gebruiken de pitch-besturing om vooruit en achteruit te bewegen en de yaw-besturing om de drone naar links en rechts te draaien. Aan het einde van de leseenheid passen de leerlingen wat ze hebben geleerd toe om een vlieguitdaging te voltooien en zo snel mogelijk door alle gele ringen in een ruitvormig pad te vliegen.
Zorg ervoor dat de leerlingen het volgende bij de hand hebben voordat u begint:
- Een opgeladen VEX AIR dronecontroller
- Een USB-C-kabel
- Een computer met toegang tot VEXcode AIR
Leerdoelen:
Deze module is ontworpen om leerlingen kennis te laten maken met de pitch- en yaw-besturing in de VEX AIR-vluchtsimulator, zodat ze de mogelijkheden van het vliegen met de virtuele drone kunnen uitbreiden. Aan het einde van deze module zullen de leerlingen in staat zijn om:
- Stel vast dat de hellingshoek een drone langs de y-as naar voren en naar achteren beweegt.
- Houd er rekening mee dat de gierbeweging een drone zijwaarts rond de z-as laat draaien.
- Beschrijf de bewegingen van een drone in een driedimensionale ruimte met behulp van termen als stampen, gieren en gas geven.
- Demonstreer gecontroleerde voorwaartse, achterwaartse en draaiende bewegingen met behulp van de controller en de simulator.
- Combineer pitch- en yaw-commando's om de drone te besturen en een uitdaging te voltooien.
Afstemming van standaarden
Common Core English Language Arts (CCSS ELA)
- CCSS.ELA-LITERACY.CCRA.L.6 - Verwerf en gebruik nauwkeurig een reeks algemene academische en vakspecifieke woorden en zinsdelen die voldoende zijn voor lezen, schrijven, spreken en luisteren op het niveau dat nodig is voor hoger onderwijs en een carrière; toon zelfstandig kennis van de woordenschat wanneer u een onbekende term tegenkomt die belangrijk is voor begrip of uitdrukking.
- CCSS.ELA-LITERACY.RST.9-10/11-12.3 - Volg nauwkeurig een complexe procedure met meerdere stappen bij het uitvoeren van experimenten, het nemen van metingen of het verrichten van technische taken, waarbij rekening wordt gehouden met speciale gevallen of uitzonderingen zoals beschreven in de tekst.
- CCSS.ELA-LITERACY.RST.9-10/11-12.4 - Bepaal de betekenis van symbolen, sleuteltermen en andere domeinspecifieke woorden en zinsneden zoals die worden gebruikt in een specifieke wetenschappelijke of technische context die relevant is voor de onderwerpen van het betreffende leerjaar.
Internationale Vereniging voor Technologie in het Onderwijs (ISTE)
- Bekwame leerling – 1.1.d – Leerlingen begrijpen fundamentele concepten over hoe technologie werkt, tonen het vermogen om bestaande technologieën effectief te kiezen en te gebruiken, en zijn bedreven in het doordacht verkennen van opkomende technologieën.
- Kennisconstructie – 1.3.d – Leerlingen bouwen kennis op door zich te verdiepen in vraagstukken uit de praktijk en doen ervaring op met het toepassen van hun leerstof in authentieke situaties.
- Wereldwijde samenwerking - 1.7.c - Studenten leveren een constructieve bijdrage aan projectteams door verschillende rollen en verantwoordelijkheden op zich te nemen om effectief samen te werken aan een gemeenschappelijk doel.
Nu je je eerste vluchten in de VEX AIR Flight Simulator hebt voltooid, ben je klaar om meer vliegbesturingselementen te ontdekken. In deze module leer je hoe je de VEX AIR-drone bestuurt om in verschillende richtingen te vliegen met behulp van de pitch- en yaw-besturing. Je oefent met het gebruik van de joysticks op de VEX AIR dronecontroller om door ringen te vliegen. Je leert ook hoe de propellers draaien om die bewegingen te creëren.
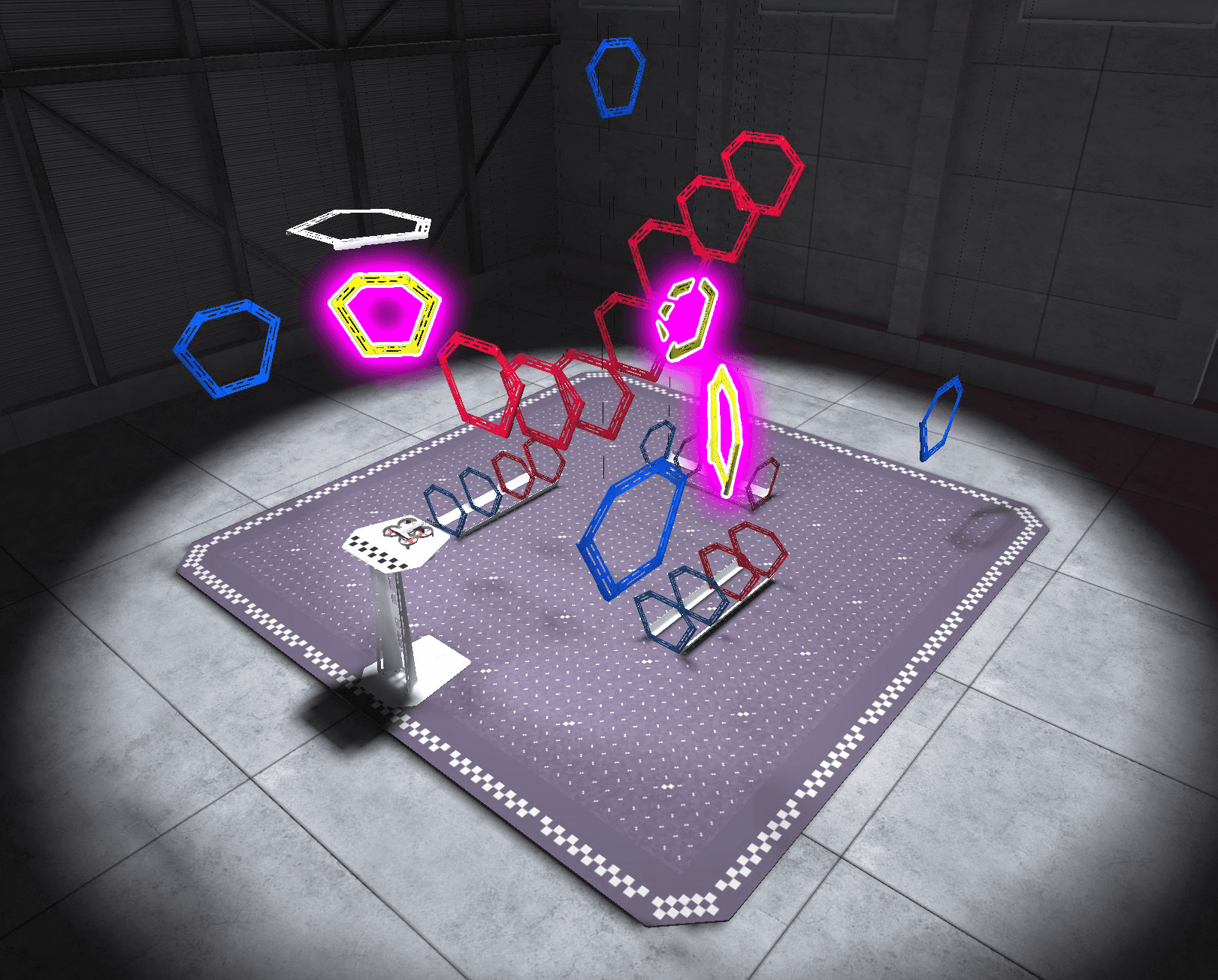
Aan het einde van deze module ben je klaar voor een mini-uitdaging waarbij je zo snel mogelijk door alle gele ringen in een ruitvormig pad vliegt!
Vocabulaire
De onderstaande kernbegrippen zullen u helpen bij het uitbreiden van uw vliegbesturing. De woordenlijst is bedoeld als naslagwerk voor belangrijke termen die u mogelijk niet kent.
- Pitch - De regelaar waarmee je de draaisnelheid van de voorste of achterste propellers aanpast om een drone vooruit of achteruit te laten bewegen.
- Yaw - De besturing die de draaisnelheid van tegenoverliggende propellerparen verandert om een drone naar links of rechts te laten draaien, terwijl de drone op dezelfde positie in de lucht blijft.
- Cartesiaans coördinatensysteem - Een rastergebaseerd systeem dat wordt gebruikt om locaties in de ruimte te bepalen met behulp van coördinaten (x, y, z) om de precieze posities van punten of objecten te beschrijven.
De onderstaande kernbegrippen zullen u helpen bij het uitbreiden van uw vliegbesturing. De woordenlijst is bedoeld als naslagwerk voor belangrijke termen die u mogelijk niet kent.
- Pitch - De regelaar waarmee je de draaisnelheid van de voorste of achterste propellers aanpast om een drone vooruit of achteruit te laten bewegen.
- Yaw - De besturing die de draaisnelheid van tegenoverliggende propellerparen verandert om een drone naar links of rechts te laten draaien, terwijl de drone op dezelfde positie in de lucht blijft.
- Cartesiaans coördinatensysteem - Een rastergebaseerd systeem dat wordt gebruikt om locaties in de ruimte te bepalen met behulp van coördinaten (x, y, z) om de precieze posities van punten of objecten te beschrijven.
Gebruik termen als pitch en yaw in je eigen spraak wanneer je de bewegingen en besturing van de drone beschrijft tijdens deze les. Help leerlingen de terminologie te koppelen aan de fysieke bewegingen van de drone door vragen te stellen over hoe de drone kantelt wanneer hij voorwaarts of achterwaarts beweegt. Door deze termen regelmatig in de juiste context te gebruiken, kunnen leerlingen de betekenis ervan beter begrijpen en de woordenschat koppelen aan het daadwerkelijke gedrag van drones.
Selecteer Volgende > om naar de volgende les te gaan.