
Achtergrond
De Little Red Robot Unit gebruikt het verhaal van Little Red Riding Hood als een voertuig om de coderingsconcepten van volgorde, selectie en iteratie te introduceren – de bouwstenen van een algoritme. Studenten zullen de volgorde in Lab 1 verkennen door hun kleine rode robot te coderen om naar het huis van oma te rijden met behulp van verschillende reeksen Drive Coder-kaarten. In Lab 2 zullen ze de selectie verkennen, door de coderingskaart "Rijden tot object" en de oogsensor te gebruiken om de robot te laten rijden totdat een object wordt gedetecteerd. In Lab 3 bouwen studenten voort op hun projecten om een voorwaardelijk toe te voegen met behulp van de coderingskaarten "If red", "Else" en "End if". Ze zullen vervolgens de iteratie verkennen, met behulp van de "Go to start" -kaart om een ‘Wolf Detecting Algorithm’ te maken.
Wat is een algoritme?
Met algoritmen kun je je robot coderen om autonoom beslissingen te nemen in reactie op gegevens uit zijn omgeving. Een algoritme is een nauwkeurige set instructies die gebruikmaakt van volgorde, selectie en iteratie (of lussen) om je robot in staat te stellen meer uitdagende taken uit te voeren, zelfs als de omgeving verandert.
- Volgorde is de volgorde waarin opdrachten worden uitgevoerd, de een na de ander. Telkens wanneer leerlingen de 123 Robot coderen, rangschikken ze Coder-kaarten in de juiste volgorde om hun doel te bereiken.
- Selectie verwijst naar het gebruik van sensordata om een beslissing te nemen binnen een project. Dit gebeurt wanneer leerlingen de 123-robot coderen om gegevens van de oogsensor te gebruiken, zoals ze doen in Labs 2 met de coderingskaart "Rijden tot object", en in Lab 3 wanneer ze de robot coderen om verschillende gedragingen uit te voeren op basis van de kleur van het gedetecteerde object.
- Iteratie is de herhaling van gedrag in een project. Studenten maken een ‘lus’ (of iteratie) in hun projecten wanneer ze de coderingskaart 'Ga naar start' toevoegen om hun project te herhalen, zoals ze doen in Lab 3.
Sequentie - Hoe wordt sequencing gebruikt in dit apparaat?
Volgorde is de volgorde waarin Coderkaarten in een project worden uitgevoerd. De Coder-kaarten beginnen met de kaart die aan de bovenkant van de Coder is geplaatst en gaan dan één voor één naar beneden.
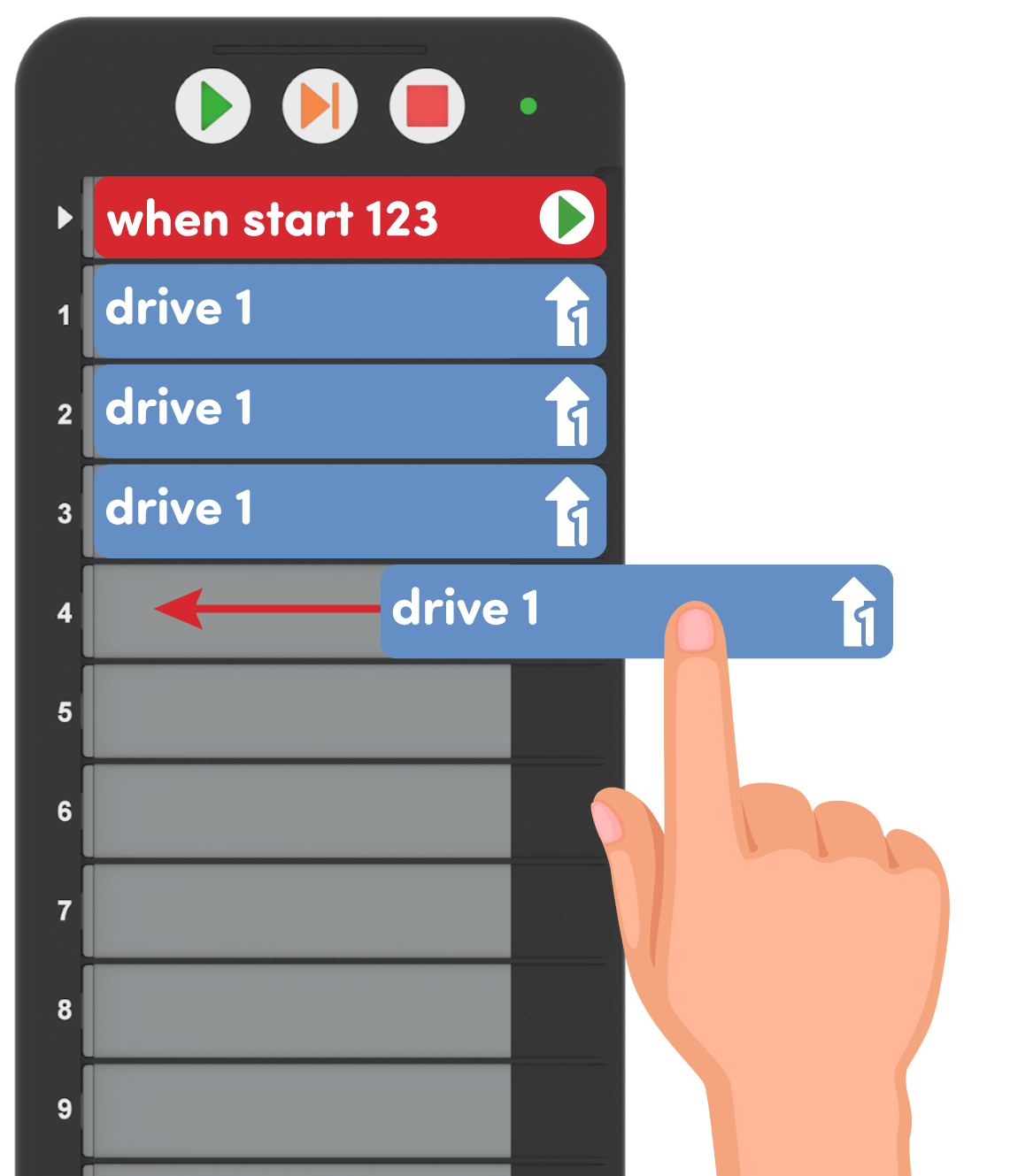
In deze animatie kunt u zien hoe het project begint met de kaart "When start 123" aan de bovenkant van de Coder, waarna elke Coder-kaart van boven naar beneden in volgorde wordt uitgevoerd. De 123 Robot rijdt vier plaatsen vooruit op een 123 Field. De groene markeringsfunctie aan de linkerkant van de coder geeft aan welke individuele coderkaart op dat moment actief is. Dit kan studenten onmiddellijk feedback geven om het gedrag van de 123 Robot te verbinden met specifieke Coder-kaarten.
Stappen voor het plannen en sequencen van Coderkaarten in een project
-
Identificeer eerst het doel - wat moet er gebeuren? Rijd bijvoorbeeld vanaf het begin naar het huis van oma.
- Breek vervolgens de stappen af die nodig zijn om het doel te bereiken en identificeer de coderingskaarten die nodig zijn om deze stappen te bereiken. Hier moet je vier stappen vooruit gaan om het huis van oma te bereiken. Dit kan worden bereikt met vier "Drive 1" -kaarten.
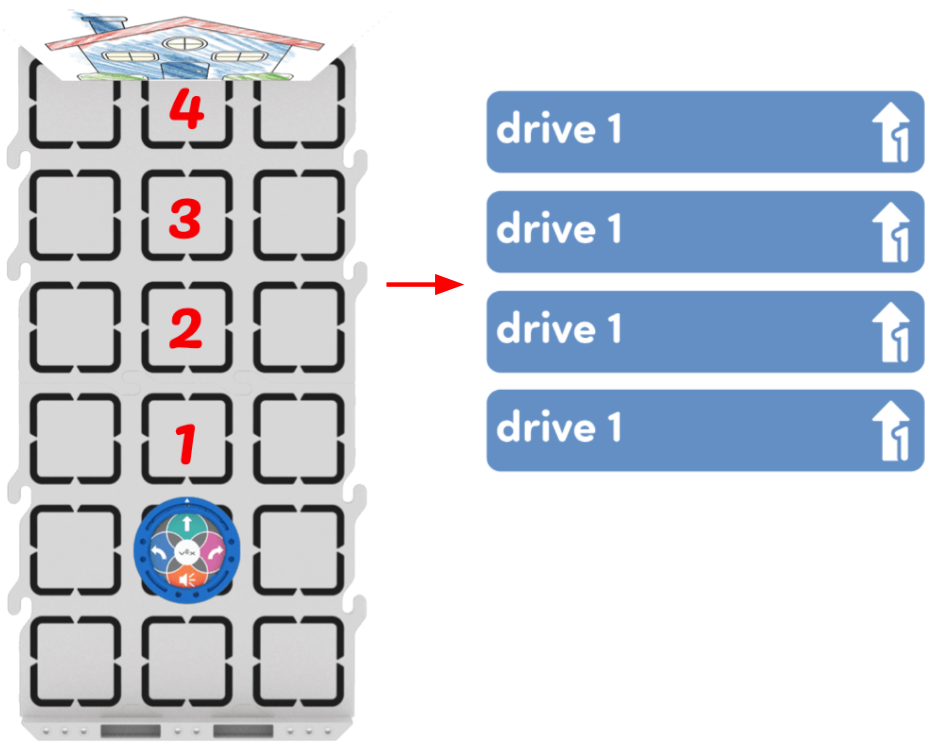
- Plan vervolgens de volgorde van het project door de Coder-kaarten op tafel te leggen. Zodra u tevreden bent met hun projectplan, plaatst u de Coder-kaarten in de Coder, beginnend van bovenaf en naar beneden werkend.
- Selecteer "Start" om het project te testen en te zien of de 123 Robot het doel bereikt dat in de eerste stap is geïdentificeerd.

Als u uw project wilt wijzigen, verwijdert u gewoon de Coder-kaarten uit de Coder, herschikt u de kaarten en plaatst u ze terug in de Coder om uw project bij te werken.
Selectie - Wat is een sensor?
Een sensor is in wezen een apparaat dat een robot helpt om de wereld om hem heen te begrijpen. Het doet dit door gegevens over zijn omgeving te verzamelen en te rapporteren, die vervolgens in een project kunnen worden gebruikt om beslissingen te nemen of bepaald gedrag uit te voeren. Deze reeks kan worden gezien als een Sense → → Think Act-beslissingslus.
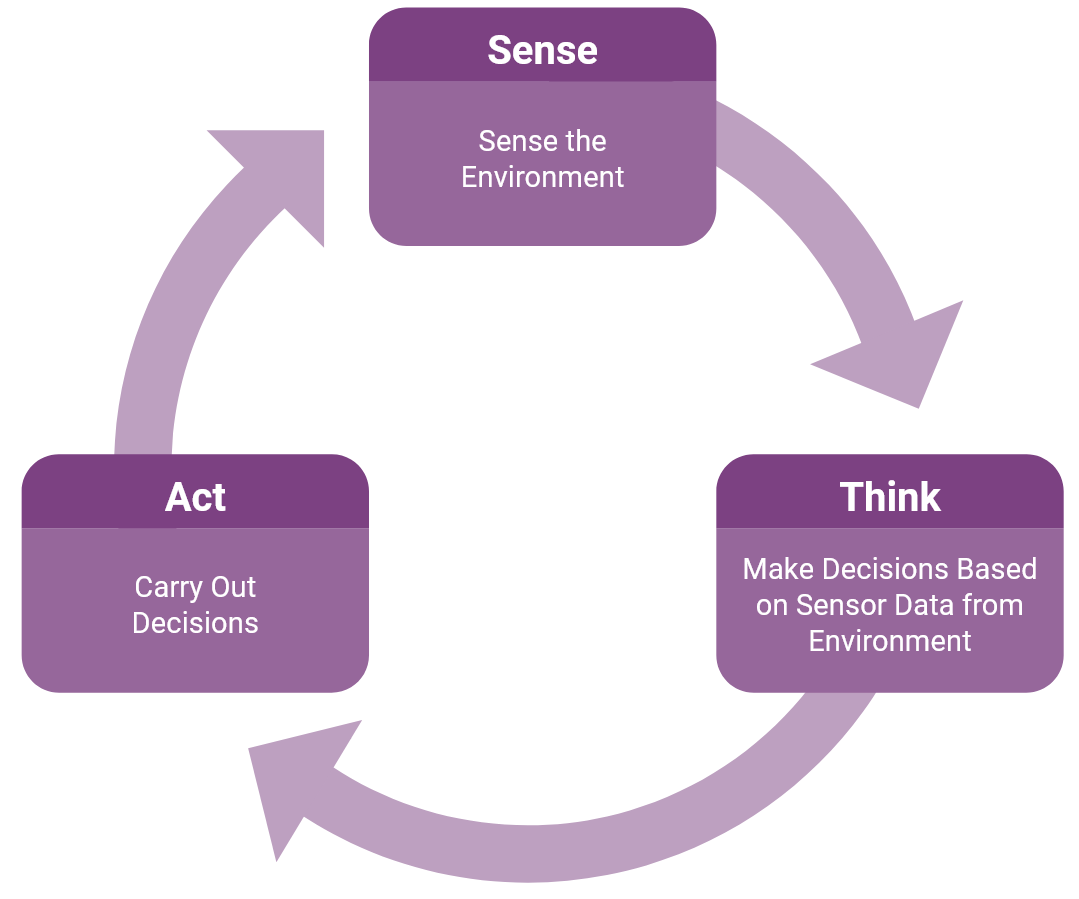
Een 123 Robot gebruikt sensoren om gegevens uit zijn omgeving te verzamelen (Sense), beslissingen te nemen op basis van deze informatie (Think) en die informatie om te zetten in instructies voor gedrag (Act).
In deze eenheid zullen studenten de 123-robot coderen om de wolf op zijn weg naar het huis van grootmoeder te detecteren. De projectstudenten die het maken, voeren de Sense → → Think Act-beslissingslus uit, omdat de oogsensor de aanwezigheid van een object (de "Wolf") zal "voelen", dan zal het "denken" of een beslissing nemen om te stoppen met rijden wanneer het object wordt gedetecteerd, en dan zal de 123 Robot handelen en stoppen met vooruitgaan.
Wat is de oogsensor?
De Oogsensor op de 123 Robot bevindt zich aan de voorkant, onder de witte pijl. De oogsensor kan worden gebruikt om de aanwezigheid of afwezigheid van een object te detecteren, evenals het kleur- of helderheidsniveau.

In deze eenheid wordt de oogsensor gebruikt om te detecteren wanneer een object (het huis van grootmoeder of de wolf) zich in het pad van de 123-robot bevindt. De positie van de Oogsensor op de 123 Robot betekent dat deze alleen objecten direct ervoor kan detecteren. Houd hier rekening mee wanneer je je 123 Robots en wolven bij je studenten plaatst, zodat de materialen studenten voorbereiden op succes.

Voor meer informatie over het coderen van de Oogsensor met de Coder, zie het artikel Coderen van de VEX 123 Oogsensor met behulp van de Coder VEX-bibliotheek.
Hoe werkt de coderingskaart "Rijden tot object"?
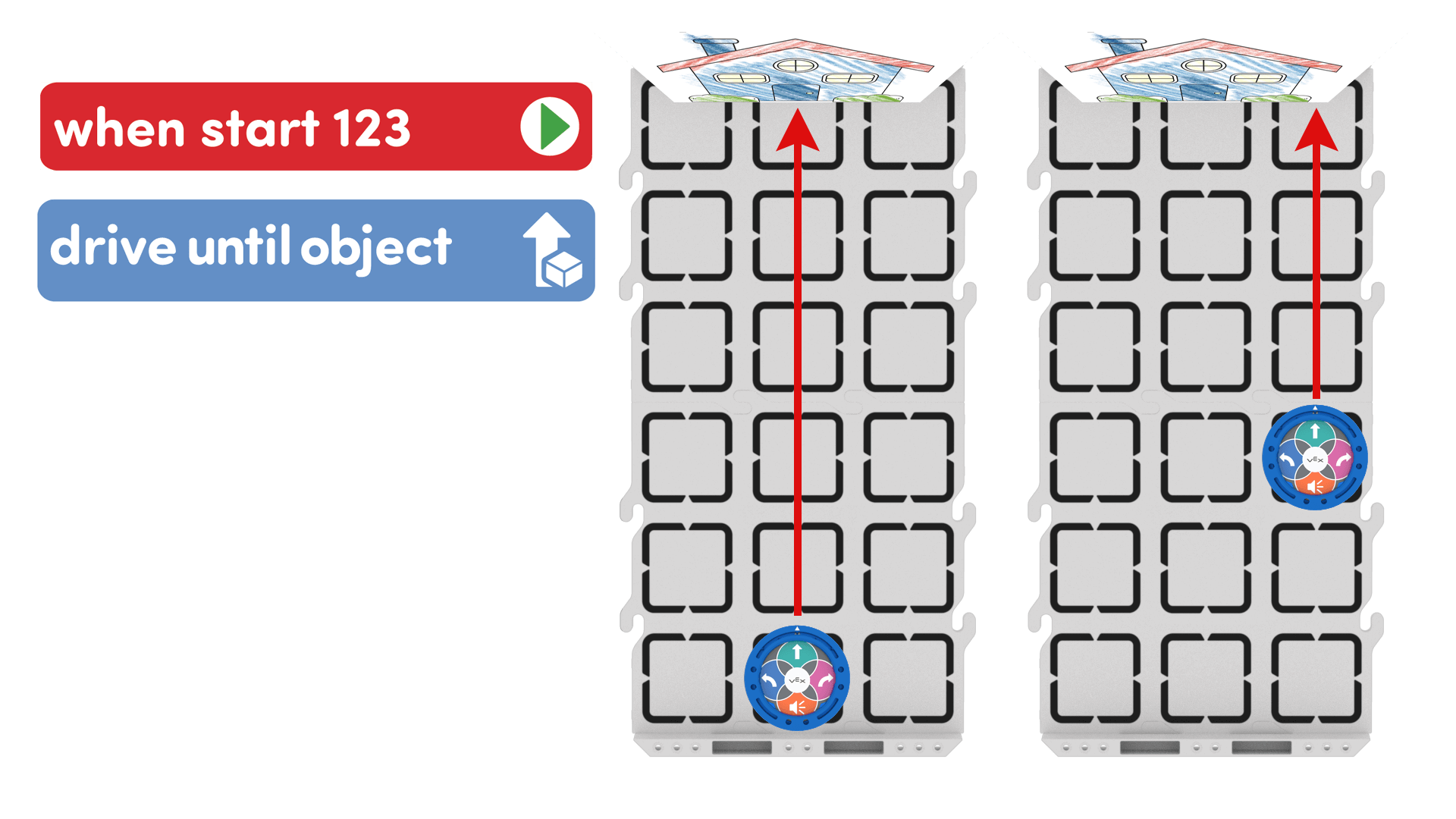
De coderingskaart "Rijden tot object" gebruikt gegevens van de oogsensor om de 123-robot vooruit te laten rijden totdat de oogsensor meldt dat een object wordt gedetecteerd. Wanneer een object wordt gedetecteerd, stopt de 123 Robot met rijden.
![]()
Dit is handig in een project wanneer de exacte locatie van een object of obstakel onbekend is of niet kan worden gepland. In deze eenheid zullen studenten eerst de coderingskaart "Rijden tot object" gebruiken om te zien dat de 123-robot met hetzelfde project met succes naar het huis van oma kan rijden, ongeacht waar het zijn reis begint.
Hoe werken de coderingskaarten "If red", "Else" en "End if" samen?
Deze coderingskaarten kunnen worden gebruikt om een project te maken waarbij de robot oogsensorgegevens over de gedetecteerde kleur gebruikt om een beslissing te nemen en verschillende gedragingen uitvoert op basis van de gedetecteerde kleur.
In Lab 3 zullen studenten de kleur van het gedetecteerde object gebruiken om de 123 Robot te coderen om de rode Wolf weg te jagen of aan te bellen bij oma's huis. Dit is gestructureerd met behulp van de coderingskaarten "If red", "Else" en "End if". Deze kaarten werken samen om een voorwaardelijke verklaring te vormen. Een voorwaardelijke verklaring wordt gebruikt om een bepaalde reeks instructies uit te voeren als aan de voorwaarde is voldaan (rapportage WAAR), en een andere reeks instructies als aan de voorwaarde NIET is voldaan (rapportage ONWAAR), waardoor de projectstroom wordt ‘vertakt’. Slechts één tak van de voorwaardelijke verklaring wordt uitgevoerd wanneer het project wordt uitgevoerd, waardoor de robot een beslissing moet nemen. In Lab 3 is de toestand die wordt gecontroleerd de toestand van rood ("Indien rood" coderingskaart). Het gedetecteerde object wordt gerapporteerd als rood (WAAR) of gerapporteerd als niet rood (ONWAAR).

De afbeelding hierboven toont het besluitvormingsproces en hoe de vertakking werkt met het project. De "End if" wordt gebruikt om de voorwaardelijke verklaring te beëindigen en geeft aan dat het besluitvormingsgedeelte van het project voltooid is - dit is het einde van het if-besluitvormingsproces. Eventuele opdrachten die na deze kaart worden toegevoegd, worden voltooid nadat de beslissing is genomen.

Deze animatie toont het project uit Lab 3. Kijk naar de markering op de Coder om te zien hoe de projectstroom beweegt als de beslissing wordt genomen.
Iteratie - Hoe werkt de coderingskaart "Ga naar start"?
De "Ga naar start" -coderkaart creëert een eeuwige lus, waardoor het project terugkeert naar de "Wanneer start 123" -coderkaart en het gedrag voor altijd achter elkaar herhaalt, totdat het project wordt gestopt.
Dit is handig in een project om ervoor te zorgen dat de robot voortdurend hetzelfde gedrag herhaalt of steeds dezelfde beslissing neemt. In Lab 3 wordt de coderingskaart "Ga naar start" geplaatst nadat het object is gedetecteerd en de beslissing is genomen. Dit herhaalt die besluitvorming keer op keer, waardoor het project en het algoritme ontstaan.
Strategieën voor lesgeven met de coder in deze eenheid
De Coder biedt studenten en docenten de mogelijkheid om tijdens de activiteiten van een Lab gemakkelijk en tastbaar met code om te gaan en deze te delen.
Ondersteunende pre of vroege lezers — Coderingskaarten zijn ontworpen om pre-readers of vroege lezers te ondersteunen, met behulp van pictogrammen om de woorden van de kaart zelf weer te geven, zodat studenten de afbeeldingen in wezen kunnen lezen als ze de woorden nog niet kunnen lezen. Moedig studenten aan om deze pictogramafbeeldingen te gebruiken om hen te helpen bij het bouwen van hun projecten. Versterk dit door te verwijzen naar de afbeeldingen op de Coder-kaarten wanneer je ze met studenten benoemt, zoals "De When start 123 Coder-kaart, degene met de groene pijl, gaat altijd eerst."

Controleer en deel code eenvoudig — Zodra Coder-kaarten in de Coder zijn geladen, kunnen studenten hun Coder omhoog houden om hun code te tonen, net zoals ze een whiteboard met een wiskundige oplossing erop omhoog zouden houden. Gebruik deze strategie tijdens groepsinstructie, als een middel om de nauwkeurigheid van studenten te controleren voordat ze aan hun projecten beginnen. U kunt snel en eenvoudig zien of de juiste coderingskaarten worden gebruikt, of ze in de juiste volgorde zijn geplaatst en of ze niet ondersteboven of achterover liggen. Kijk bij het inchecken met groepen om de onafhankelijke activiteit te vergemakkelijken naar de Coders- en Coder-kaarten om de voortgang te controleren.
Welke coderingskaarten heb je nodig?
Coderkaarten vertegenwoordigen 123 Robotcommando's die in de Coder worden geplaatst en worden gebruikt om de 123 Robot te coderen. Hieronder vindt u een lijst met de belangrijkste coderingskaarten die tijdens dit apparaat worden gebruikt. Zie het gedeelte Omgevingsinstellingen van de Samenvatting in elk Lab voor meer gedetailleerde informatie over het organiseren en distribueren van Coder-kaarten aan uw studenten.
| Coderingskaart | Gedrag | Voorbeeld |
|---|---|---|
 |
Start het project wanneer de knop ‘Start’ op de Coder wordt ingedrukt. | |
 |
123 Robot rijdt 1 robotlengte vooruit. Dit is gelijk aan 1 vakje op het 123 Veld. |  |
 |
123 Robot rijdt 2 robotlengtes vooruit. Dit is gelijk aan 2 vierkanten op het veld 123. |  |
 |
123 Robot rijdt 4 robotlengtes vooruit. Dit is gelijk aan 4 vierkanten op het veld 123. |  |
 |
123 De robot rijdt naar voren totdat de oogsensor een object detecteert. |  |
 |
Gebruikt de oogsensor om te controleren of de kleur rood wordt gedetecteerd. | |
 |
Gebruikt in combinatie met een 'If' -coderkaart. De 'Else' Coder-kaart zal Coder-kaarten uitvoeren onder de 'Else' als niet wordt voldaan aan de voorwaarde van de 'If' Coder-kaart. | |
 |
Beëindigt een reeks 'If' - en 'Else' -coderkaarten | |
 |
De Coder zal teruggaan naar de 'When start 123' Coder-kaart en doorgaan met het uitvoeren van het project. |
Bied studenten extra Coder-kaarten uit de categorieën Looks of Sounds om hun projecten uit te breiden om de Wolf weg te jagen in Play Part 2 van Lab 2. Voor een volledige lijst van coderkaarten en hun gedrag, zie het VEX Coder Card Reference Guide VEX Library-artikel.
Problemen met de oogsensor in lab 3 oplossen
Als uw project in Lab 3 niet loopt zoals bedoeld, kan het probleem liggen aan de manier waarop de oogsensor objecten en hun kleuren in uw klas detecteert. Voordat u problemen met de oogsensor oplost, kan het nuttig zijn om een beetje te begrijpen hoe het werkt als het gaat om kleurdetectie.
De oogsensor detecteert een 'tintwaarde' die op een kleur is afgestemd, niet specifiek een 'kleur'. Er zijn veel tinten rood, blauw en groen en elk heeft zijn eigen tintwaarde. De kleuren die worden gerapporteerd als gedetecteerd door de sensor, zijn eigenlijk reeksen van tintwaarden die correleren met 'rood', 'blauw' of 'groen'. De oogsensor detecteert de tintwaarde van het object ervoor, en als die waarde binnen het bereik valt dat is uitgelijnd op 'rood', 'blauw' of 'groen', dan wordt de kleur als zodanig gerapporteerd.
Er zijn verschillende strategieën voor probleemoplossing die u ook kunt proberen om het project te laten werken zoals bedoeld.
- Pas het omgevingslicht aan - De oogsensor op de 123 Robot is lichtgevoelig. Als het omgevingslicht in de kamer donker is of een gele tint heeft, zoals florescentielampen, kan dit de kleuraflezingen van de oogsensor beïnvloeden. Probeer je opstelling naar een helderdere ruimte in het klaslokaal te verplaatsen of schakel extra lichten in om te zien of dat de robot helpt om de kleuren nauwkeuriger te detecteren.
- Test de kleurdetectie met een andere 123 Robot - De 'rode', 'groene' en 'blauwe' waarden die door de Oogsensor worden gedetecteerd, zijn uitgelijnd met de rode, groene en blauwe tintwaarden van de 123 Robots. Vervang de rode Wolf door een rode 123 Robot en voer het project uit. Als het project nu loopt zoals bedoeld, zorg er dan voor dat de kleur van de Wolf dezelfde is, of een vergelijkbare tint als het rood van de 123 Robot.
- Test de kleurdetectie met behulp van de Klaslokaal-app - Open met de 123 Robot aan de Klaslokaal-app de Klaslokaal-app, selecteer de robot die u test en selecteer 'Toon apparaatinformatie'. Met de apparaatinformatie open, is de eerste sensor die gegevens toont de oogsensor. De oogsensor meldt de kleur die de sensor detecteert (rood, blauw, groen of n.v.t.) en de tintwaarde wordt gedetecteerd in graden. Plaats de 123 Robot voor de rode Wolf en kijk welke kleur en tintwaarde worden gerapporteerd in de Klaslokaal-app.
- Als de gerapporteerde kleur niet 'rood' is, vervang dan eerst de rode Wolf door een rode 123 Robot en kijk of de robot rood meldt. Als dat het geval is, pas dan de kleur van de rode Wolf aan om beter bij de rode robot te passen en gebruik de Klaslokaal App-metingen om je bij dit proces te helpen.
- Je kunt ook proberen de omgevingsverlichting in het klaslokaal aan te passen, om te zien of dat ook helpt om je kleuraflezingen nauwkeuriger te maken.
- Bekijk het artikel De Klaslokaal-app gebruiken om problemen met uw 123 Robot op te lossen voor meer informatie.
- Bekijk het artikel Problemen oplossen VEX 123-sensoren voor aanvullende stappen en informatie voor het oplossen van problemen.