
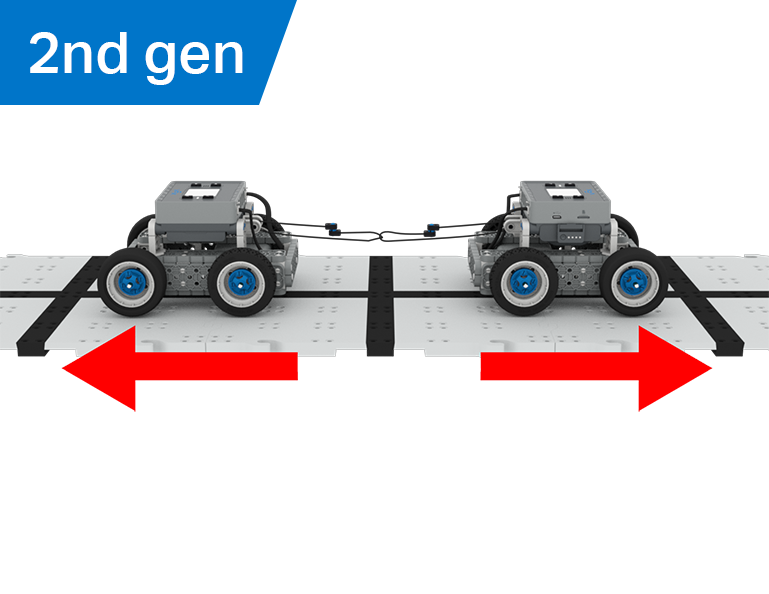
ชักเย่อ
6 บทเรียน
ในบทนี้ คุณจะได้สำรวจว่าความได้เปรียบเชิงกลและจุดศูนย์กลางมวลส่งผลต่อความสามารถของ เบสบอท ในการดึงวัตถุอย่างไร และออกแบบหุ่นยนต์ที่ดีที่สุดสำหรับเกม ชักเย่อ!
เยี่ยมชมพอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียนชักเย่อ

บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Tug of War และสร้าง BaseBot
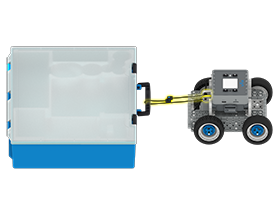
บทที่ 2: การดึงวัตถุด้วย BaseBot
ในบทเรียนนี้คุณจะออกแบบการยึดเชือกเพื่อฝึกการดึงวัตถุด้วย BaseBot ของคุณ จากนั้นคุณจะได้แข่งขันในการท้าทาย Robot Tractor Pull

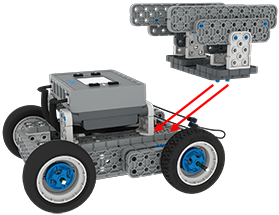
บทที่ 3: การใช้ขบวนเกียร์
ในบทเรียนนี้คุณจะเพิ่มรถไฟเกียร์ลงใน BaseBot ของคุณเพื่อสำรวจว่าการกำหนดค่าเกียร์ที่แตกต่างกันมีผลต่อความสามารถในการดึงวัตถุของหุ่นยนต์ของคุณอย่างไร จากนั้นคุณจะได้แข่งขันในการท้าทาย Gear Train Tractor Pull
บทเรียนที่ 4: การเพิ่มมวล
ในบทเรียนนี้คุณจะเพิ่มมวลลงใน BaseBot ของคุณเพื่อสำรวจว่าการเปลี่ยนศูนย์กลางของมวลมีผลต่อความสามารถในการดึงวัตถุของหุ่นยนต์ของคุณอย่างไร จากนั้นคุณจะได้แข่งขันในการท้าทาย Tug of War
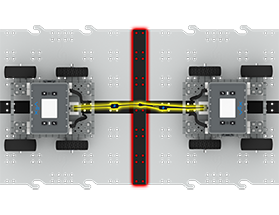
บทที่ 5: การแข่งขันชักเย่อ
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Tug of War!

บทที่ 6: บทสรุป
ในบทเรียนนี้ คุณจะได้สะท้อนถึงการเรียนรู้ของคุณในหน่วยนี้ และระบุความเชื่อมโยงระหว่างสิ่งที่คุณได้ทำกับอาชีพ STEM