
Arka plan
Bu kodlama ünitesinde öğrenciler yinelemeli tasarım sürecini keşfedecekler. Öğrenciler, VEX GO Kitinden çöp toplayan bir eklenti oluşturarak okyanus kirliliği gibi gerçek bir sorunu nasıl çözeceklerini keşfedecekler. Bu ünitedeki her ders, uzantı yapısının güçlü ve zayıf yönlerinin analiz edilmesi ve bir sonraki tasarım için iyileştirme fikirlerinin sunulmasıyla sona erer.
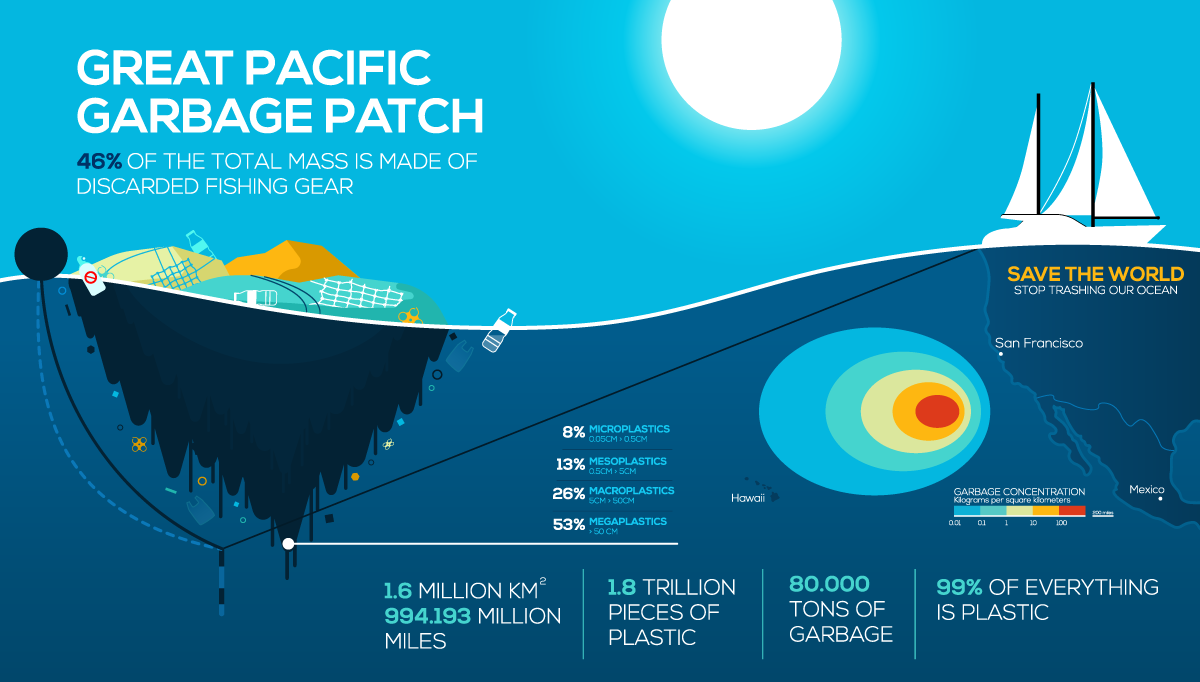
Büyük Pasifik Çöp Lekesi Nedir?
Büyük Pasifik Çöp Alanı her geçen gün büyüyen bir çöp yığınıdır. Pasifik Okyanusu'nda Hawaii ile Kaliforniya arasında bir yerde yüzen bu bölgenin, Teksas'ın iki katı büyüklüğünde bir alanı kapladığı tahmin ediliyor. Çöpler, plastik, metal ve diğer malzemelerden oluşan tek bir katı kütle halinde yüzerken, gevşek döküntüler çevrenin ötesine doğru yüzer. Bu ünitede öğrencilerden, Büyük Pasifik Çöp Alanı'ndaki çevre döküntülerini temizlemeye yardımcı olacak Kod Tabanı robotları için bir uzantı oluşturmaları isteniyor.
Mühendislik Tasarım Süreci
Öğrenciler, Kod Tabanlı robotları için bir eklenti tasarlamak ve oluşturmak amacıyla Mühendislik Tasarım Sürecini (EDP) kullanacaklar. EDP, mühendislerin sorunlara çözüm üretmek için kullandıkları bir dizi adımdır. Çoğu zaman çözüm, belirli kriterleri karşılayan veya belirli bir görevi yerine getiren bir ürün tasarlamaktır.
EDP aşağıdaki adımlara ayrılabilir: TANIMLA → ÇÖZÜMLER GELİŞTİR → OPTİMİZE ET.
- Mühendislik problemlerini tanımlamak çözülecek problemi başarı kriterleri, kısıtlamalar veya limitler açısından mümkün olduğunca açık bir şekilde ortaya koymayı içerir.
- Mühendislik problemlerine çözüm tasarlamak , önce bir dizi farklı olası çözüm üretmekle başlar, ardından potansiyel çözümleri değerlendirerek hangilerinin problemin kriterlerini ve kısıtlamalarını en iyi karşıladığını görmek gerekir.
- Tasarım çözümünün optimize edilmesi çözümlerin sistematik olarak test edilip iyileştirildiği ve nihai tasarımın daha az önemli özelliklerin daha önemli olanlarla takas edilmesiyle iyileştirildiği bir süreci içerir.
EDP doğası gereği döngüsel veya yinelemeli . Bir ürünü veya süreci yapma, test etme, analiz etme ve iyileştirme sürecidir. Test sonuçlarına göre yeni yinelemeler oluşturulur ve tasarım ekibi sonuçlardan memnun kalana kadar değiştirilmeye devam edilir.
Bu Ünitede öğrenciler, bir geçit töreni aracı hayal etmek, planlamak ve inşa etmek için EDP'yi kullanacaklar. İlk yapının oluşturulmasının ardından gruplar, tasarım kriterlerini ve kısıtlamaları karşılamak için temel tasarımlarını test edecek ve iyileştirecekler. Bu, Yeni Nesil Bilim Standartları (NGSS) tarafından kapsanan Mühendislik Tasarım Sürecinin aynısıdır.
Dizileme
Sıra , davranışların gerçekleştirildiği belirli sıradır. Bir eylem veya olay, bir dizideki bir sonraki sıralı eyleme yol açar. Öğrencilerin robotlarını doğru bir şekilde kodlayabilmeleri için sıralama önemlidir.
Bir robota tam ve kesin bir şekilde nasıl hareket edeceğini söyleyebilmek için hem ayrıştırmaya hem de sıralamaya ihtiyaç vardır. Öncelikle labirentte nasıl hareket edileceği gibi problemler daha küçük parçalara ve davranışlara ayrıştırılacak. Daha sonra bu davranışlar belirlendikten sonra bunların doğru sıraya konulması gerekir. Bu önemlidir, çünkü robot yalnızca kodlandığı şekilde hareket edecektir.
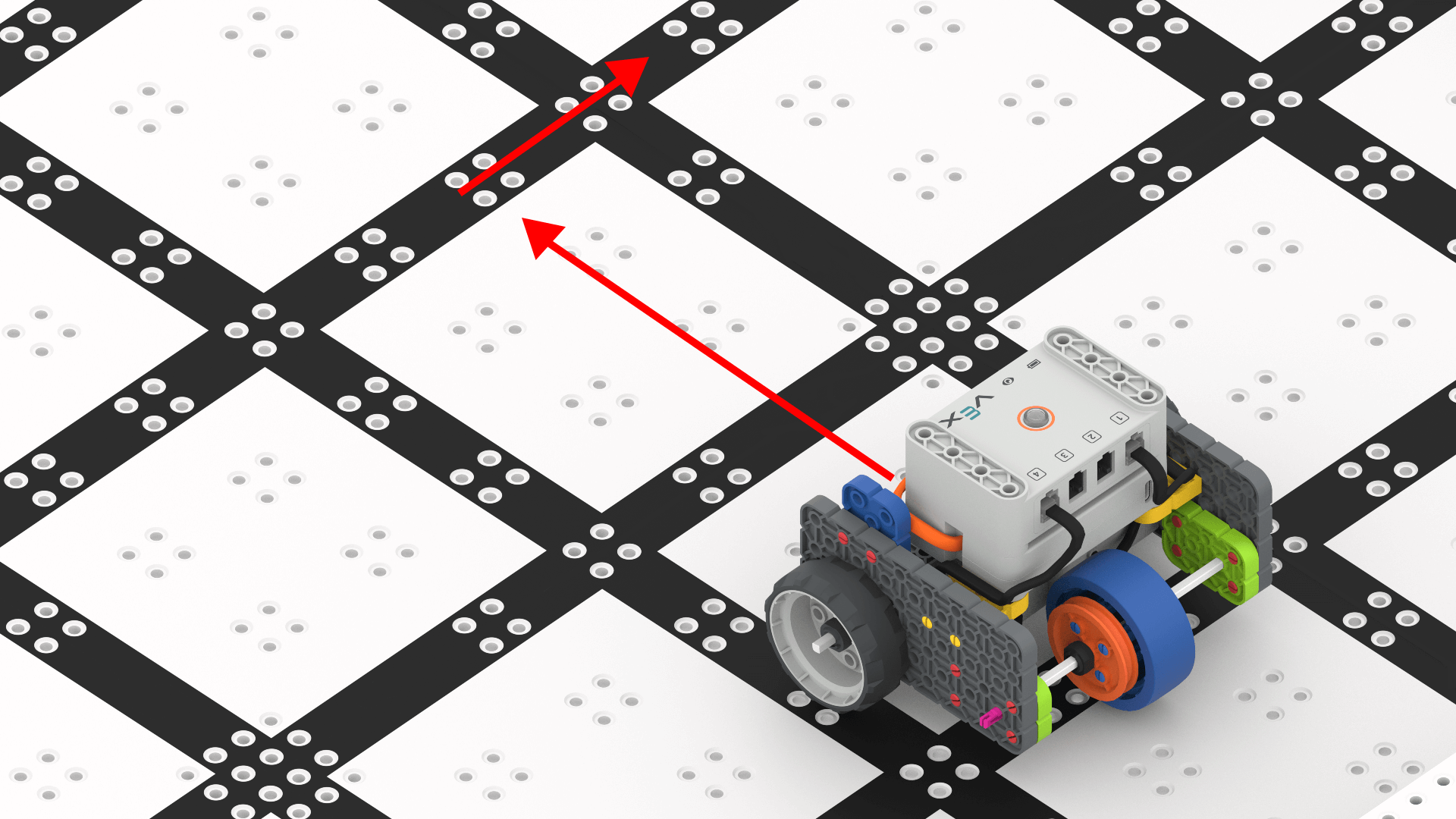
Öğrenciler, meydan okuma alanında hareket etmek ve nesneleri toplamak için Kod Tabanlarını kodlayacaklar. Zorluk alanında gezinmek için Kod Tabanlarının doğru sırayla ileri, geri, sola ve sağa hareket etmesini sağlamak amacıyla projelerindeki komutları sıralamaları gerekecektir.
- İleriye doğru hareket et
- Sağa dönün
- İleriye doğru hareket et
Ayrışma
Ayrıştırma karmaşık bir sorunu daha yönetilebilir ve anlaşılması daha kolay davranışlara ayırmayı içerir. Sorunu daha küçük parçalara bölmek, her bir parçanın daha detaylı incelenebilmesi ve daha kolay çözülebilmesi anlamına gelir. Örneğin, bir öğrenci robotunun kare şeklinde hareket etmesini istiyorsa, bunu daha küçük komutlara bölmesi gerekecektir. Öğrencilerin parçalama sürecini geliştirmeleri önemlidir, çünkü ilk başta komutları daha küçük bileşenlere ayırmayabilirler:
| Kare dökümünde hareket et 1 | Kare dökümüyle hareket et 2 | Karesel bir dağılımla hareket et 3 |
|---|---|---|
|
|
|
Pseudocode Nedir?
Sahte kod, kodun sözlü ve yazılı açıklamalarını birleştiren bir kodlama kısaltmasıdır.
Öğrenciler çoğu zaman bir çözüme ulaşmak için "tahmin ve kontrol" yolunu kullanabilirler. Ancak bu, onların programlama kavramlarına ilişkin kavramsal bir anlayış geliştirmeleriyle sonuçlanmıyor. Sahte kod yazımı, öğrencilerin programlamaya ilişkin yüzeysel bir anlayıştan daha kavramsal bir anlayışa geçmelerine yardımcı olur. Sahte kod, öğrencilerin programlamaya başlamadan önce programlama çözümleri hakkında kavramsal olarak düşünmelerini gerektirir. Öğretmenler, öğrencilere şu soruları sorarak sözde kodu öğrencilerle tartışmalıdır:
- Projelerinin neyi başarmasını istiyorlar?
- Projenin amacını veya hedefini kısa ve net ifadelere nasıl böleceksiniz?
Bu örnekte, öğrencilerden robotun ileri hareket etmesini, bir duvarı algılamasını, sağa dönmesini ve ardından tekrar ileri hareket etmesini isteyen bir sözde kod oluşturmaları istenseydi, bu kod şu şekilde olurdu:
- Robotu duvardan 50 mm uzaklaşana kadar ileri doğru sürün
- Robotu durdur
- Robotu 90 derece döndürün
- Robotu durdur
- 600 mm ileri sürüş
Bir sözde kod oluşturulduktan sonra, öğrenciler robotun sözde kodunun her adımını nasıl başarıyla tamamlayacağını öğretmek için programlama kodunu oluşturacaklar.
Robot Davranışları Nelerdir?
"Davranışlar" robotun ne yaptığını ve ne yapması gerektiğini anlatmanın çok kullanışlı bir yoludur. İleriye doğru hareket etmek, durmak, dönmek, bir engeli aramak; bunların hepsi birer davranıştır.
Öğrenciler kodlama görevine başladıklarında robotun davranışlarını da düşünmeye başlamalıdırlar. Öğrenciler kod yazarken şu adımları izlemelidir:
- Robotun istenilen eylemi gerçekleştirmesi için bir plan oluşturun.
- Plan içindeki davranışları belirleyin ve davranışları mümkün olduğunca küçük tutmaya çalışın.
- Bu planı robotun takip edebileceği bir projeye dönüştürün.
Plan, robotun izlemesi gereken davranış dizisi olacak ve proje de bu davranışların VEXcode GO'ya çevrilmiş hali olacak.
Görevleri daha küçük davranışlara bölmek ve daha sonra bu davranışlarla çözümler oluşturmak birçok farklı konuya uygulanabilen bir beceridir.
VEXcode GO nedir?
VEXcode GO, VEX GO robotlarıyla iletişim kurmak için kullanılan bir kodlama ortamıdır. Öğrenciler, robotlarının hareketlerini kontrol eden VEXcode GO projeleri oluşturmak için sürükle ve bırak arayüzünü kullanırlar. Her bloğun amacı, ,ve etiketi gibi görsel ipuçları kullanılarak belirlenebilir.
Bu Ünitede aşağıdaki VEXcode GO blokları kullanılacaktır:
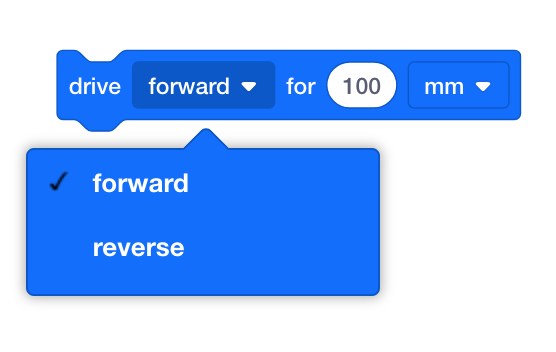
[Sürüş] - Aktarma Organlarını belirli bir mesafe boyunca ileri veya geri hareket ettirir. Aktarma Organlarının hangi yöne hareket edeceğini seçin ve oval alana bir değer girerek ne kadar uzağa hareket edeceğini ayarlayın.
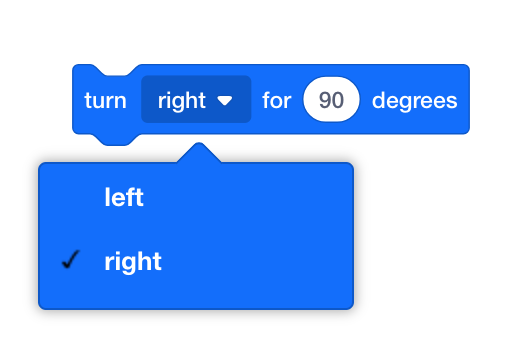
[Döndür] - Aktarma Organlarını belirli bir derece kadar sola veya sağa döndürür. Aktarma Organlarının döneceği yönü seçin ve oval alana bir dizi derece girerek ne kadar hareket edeceğini ayarlayın.
[Yorum] - programcıların projelerini tanımlamalarına yardımcı olacak bilgiler yazmalarına olanak tanır. Yorumlar projeyi veya onu çevreleyen blokları değiştirmez.

Sınıfınızda VEXcode GO kullanmaya başlamak için, VEX Classroom Uygulamasını bir öğretmenin cihazına indirin, ardından VEX Classroom Uygulamasını Kullanma makalesindeki adımları izleyerek GO Brain aygıt yazılımını nasıl güncelleyeceğinizi, GO Brain'leri nasıl yeniden adlandıracağınızı ve konumlandıracağınızı ve sınıfınızdaki GO Brain Pillerini nasıl izleyeceğinizi öğrenin. VEXcode GO hakkında daha fazla bilgi için VEX Kütüphanesi'nin VEXcode GO bölümü ziyaret edin.