Повний обсяг
4 Уроки
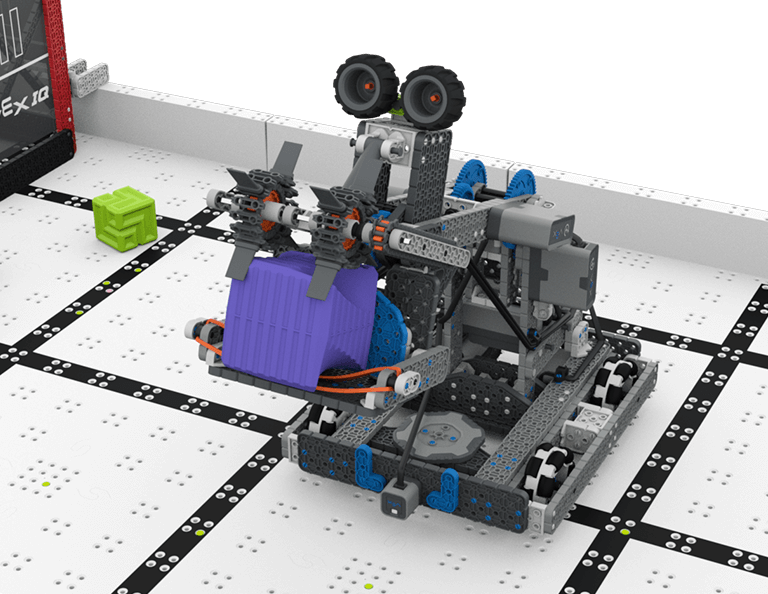
У цьому підрозділі ви створите Byte, HeroBot для гри VIQRC Full Volume 2023-2024 і навчитеся забивати. Протягом цього розділу ви дізнаєтеся про водіння Byte і про те, як почати кодувати Byte для автономного пересування, щоб ви могли взяти участь у Robot Skills Challenge під час сезону змагань.
*Потрібен IQ (2nd gen) Competition Kit
Відвідайте Портал для вчителів, щоб отримати допоміжні матеріали для вчителів і відео про зміст і полегшення повних уроків.
Lesson 1: Building and Driving Byte
In this Lesson you will build Byte, the HeroBot for the 2023-2024 Full Volume game and learn how to drive it with the IQ Controller.
Lesson 2: Driving Skills
In this Lesson, you will learn about the Full Volume Competition so that you can compete in a Driving Skills Match.
Lesson 3: Autonomous Coding Skills
In this Lesson, you will learn how to code the drivetrain, intake, and arm of Byte so that you can compete in an Autonomous Coding Skills Match.
Lesson 4: Sensors on Byte
In this Lesson, you will learn about the sensors that are a part of Byte. Then you will apply your skills from the previous Lessons and participate in a Robot Skills Challenge.

Вгору і знову
6 Уроки
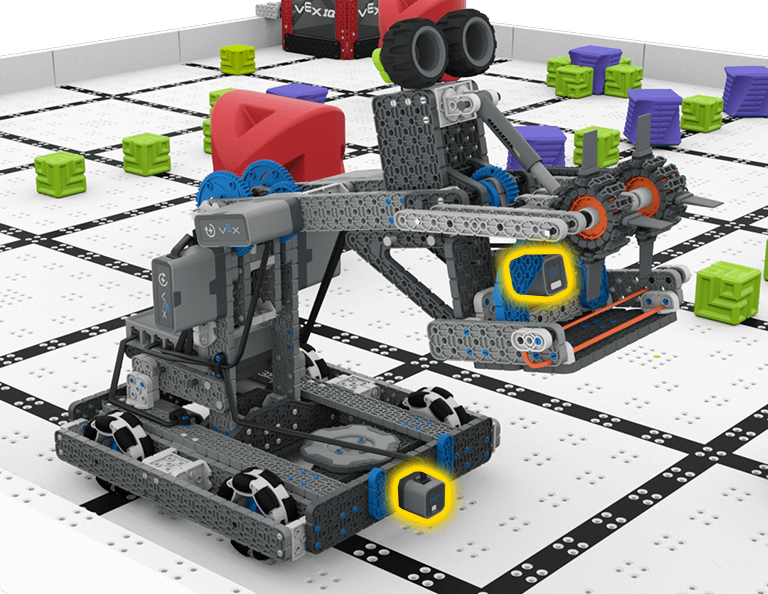
У цьому розділі ви дізнаєтесь, як створити Clawbot, щоб збирати, підбирати та переміщувати кубики з одного боку поля на інший у змаганні Up and Over!
Відвідайте портал для вчителів, щоб отримати допоміжні матеріали для вчителів і відео про зміст і фасилітацію уроків Up and Over.

Lesson 1: Introduction
In this Lesson, you will be introduced to the Up and Over competition, set up the Battery and Controller, get ready to code, and build the Clawbot.
Lesson 2: Claw Design
In this Lesson, you will learn what a claw is, how an effective claw works, and how scouting can benefit your team's designs and strategy. Then, you will apply what you have learned in the Grab and Go challenge.
Lesson 3: Arm Designs
In this Lesson, you will learn about different elements of robotic arms, how they work, and what makes an effective arm design, in order to stack as many cubes as you can within a minute in the Stacked Up challenge.
Lesson 4: Motor Groups
In this Lesson, you will learn what motor groups are, how they can be helpful, and how to configure motor groups in VEXcode IQ in order to iterate on your robot to complete the Up and Over challenge.
Lesson 5: Up and Over Competition
In this Lesson, you will apply your learning from the previous Lessons to compete in the Up and Over competition!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
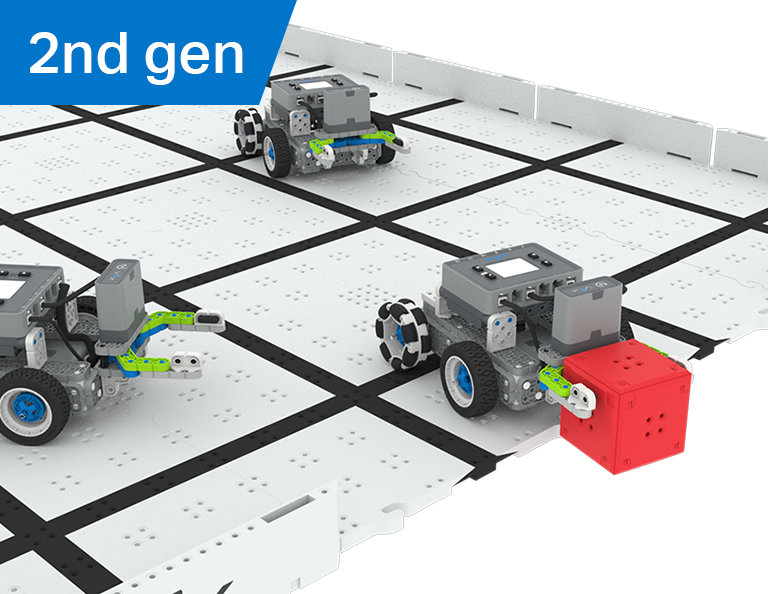
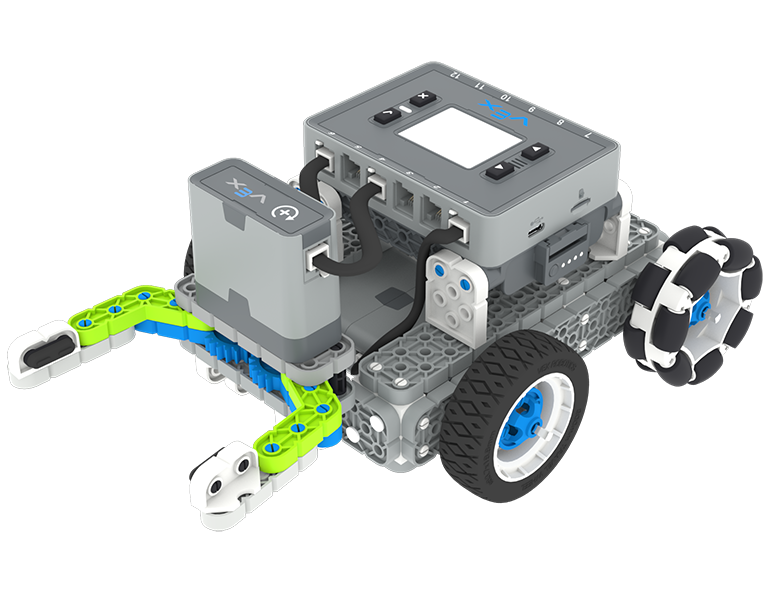
Робот Футбол
4 Уроки
У цьому розділі ви дізнаєтеся, як створити маніпулятор на вашому роботі, щоб захоплювати, пасувати та забивати найбільшу кількість голів як робот-футболіст у змаганні Robot Soccer!
Відвідайте Портал для вчителів, щоб отримати допоміжні матеріали для вчителів і відео про зміст і фасилітацію уроків футбольного робота.
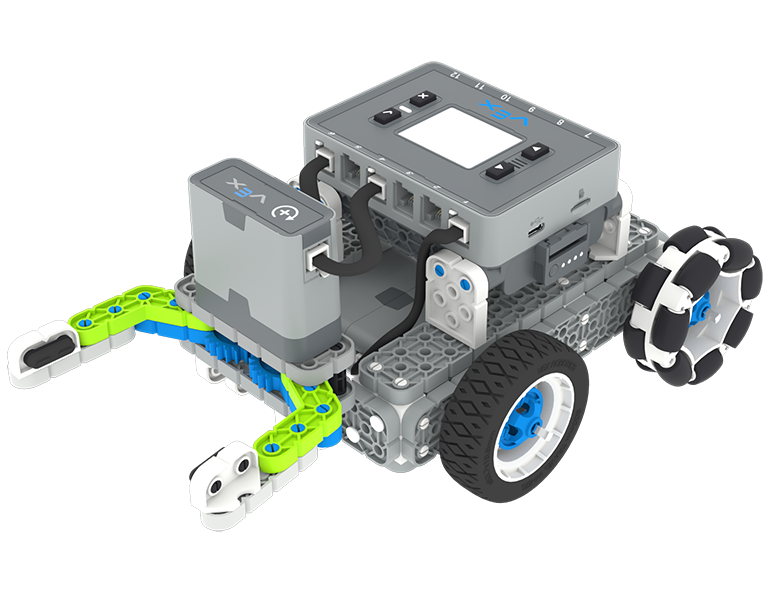
Урок 1: Вступ
У цьому уроці ви побудуєте Simple Clawbot, зарядите контролер і батарею та підготуєтесь до кодування.
Урок 2: Маніпулятори
У цьому уроці ви дізнаєтеся про пасивні та активні маніпулятори та конструкцію впускного отвору, щоб повторити конструкцію свого робота та змагатися у змаганні з футболу один на один!
Урок 3: Змагання з футболу роботів
У цьому уроці ви застосуєте отримані знання з попереднього уроку, щоб взяти участь у змаганні з футболу роботів!
Урок 4: Висновок
У цьому уроці ви поміркуєте над модулем і визначите зв’язки між тим, що ви зробили, і пов’язаною кар’єрою в STEM.

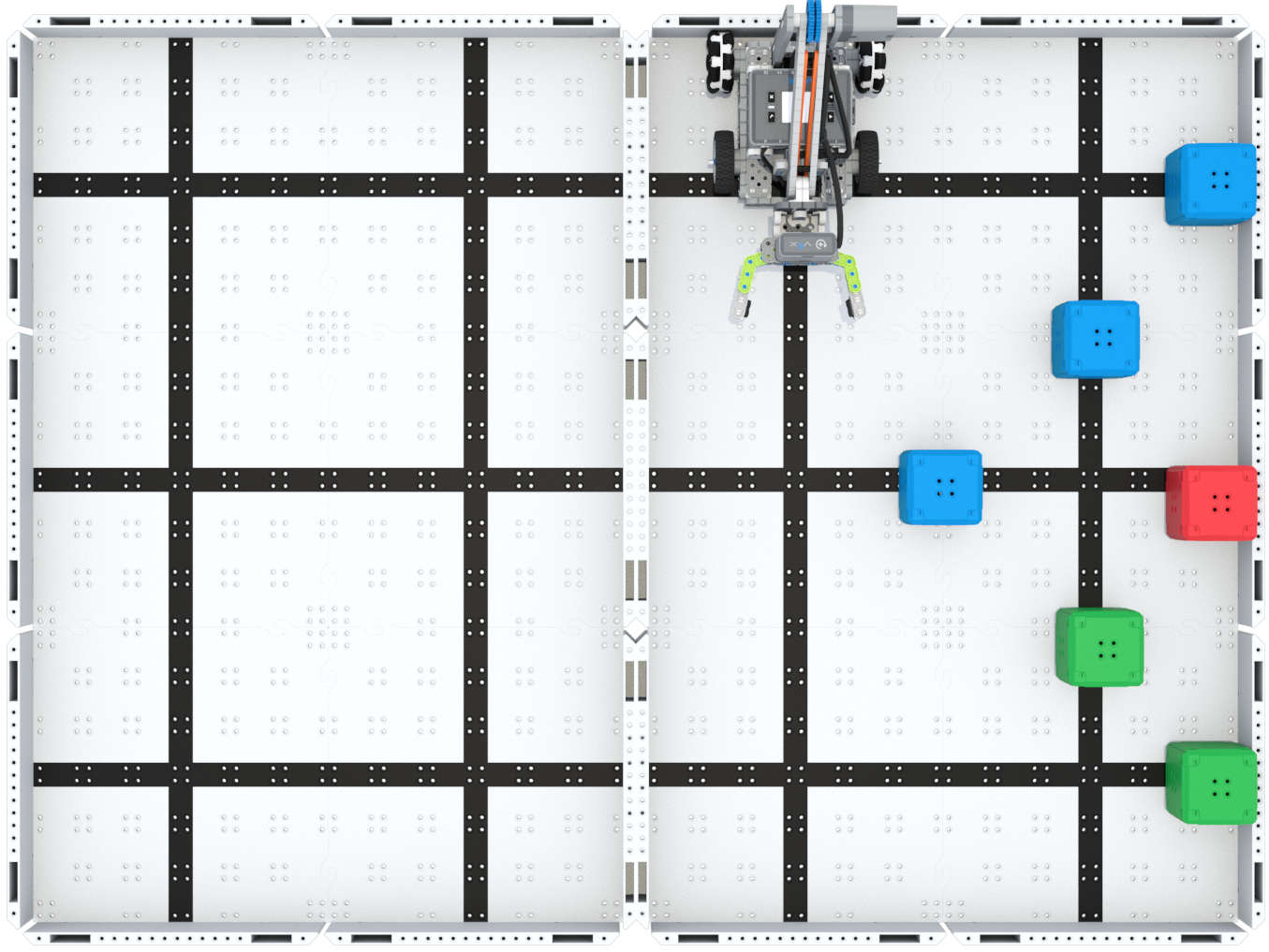
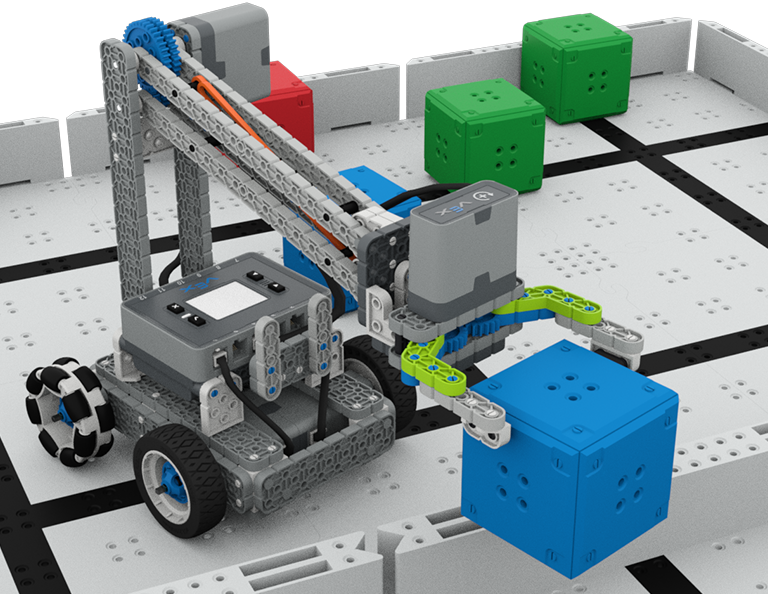
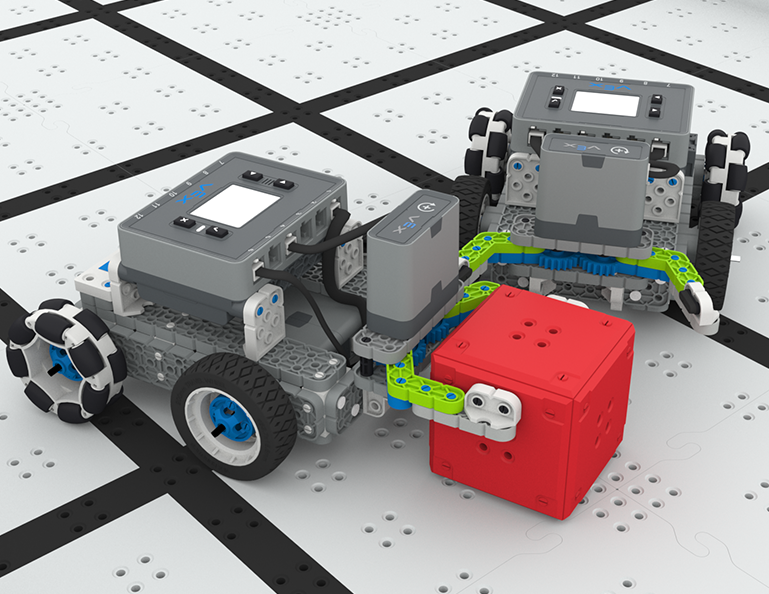
Колекціонер кубів
6 Уроки
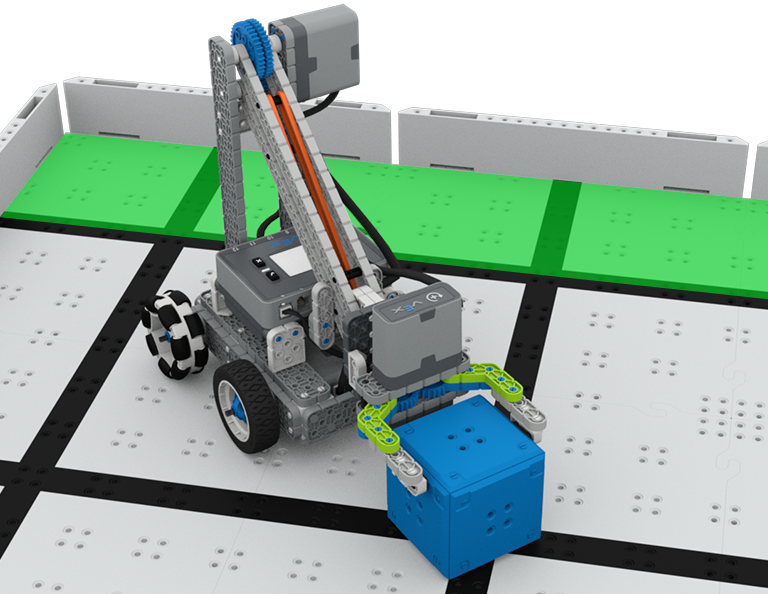
У цьому розділі ви дослідите різницю між керуванням водія та автономними завданнями, коли навчитеся керувати Clawbot і кодувати його для сортування та складання кубиків у змаганні Cube Collector!
Відвідайте Портал для вчителів, щоб отримати допоміжні матеріали для вчителів і відео про зміст і фасилітацію уроків Cube Collector Lessons.
Lesson 1: Introduction
In this Lesson, you will be introduced to the Cube Collector competition, build the Clawbot, and get ready to code.

Lesson 2: Driver Control
In this Lesson, you will learn about using the Driver Control program on the IQ Brain so that you can drive the Clawbot to stack and score cubes on the Field and participate in the Speed Stack Challenge.

Lesson 3: Coding for Autonomous Movements
In this Lesson, you will learn about coding your robot for autonomous movements, including how to plan the path of your robot. Then, you will create a VEXcode IQ project to score and stack cubes in the Coding for Cubes autonomous challenge.

Lesson 4: Using Multiple Programs (Autonomous & Driver)
In this Lesson, you will learn about customizing driver controls and how you can use the Controller and VEXcode IQ to optimize your driver strategy for competing in a challenge with driver control and autonomous runs.

Lesson 5: Cube Collector Competition
In this Lesson, you will apply your learning from the previous Lessons to compete in the Cube Collector competition!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a related STEM career.

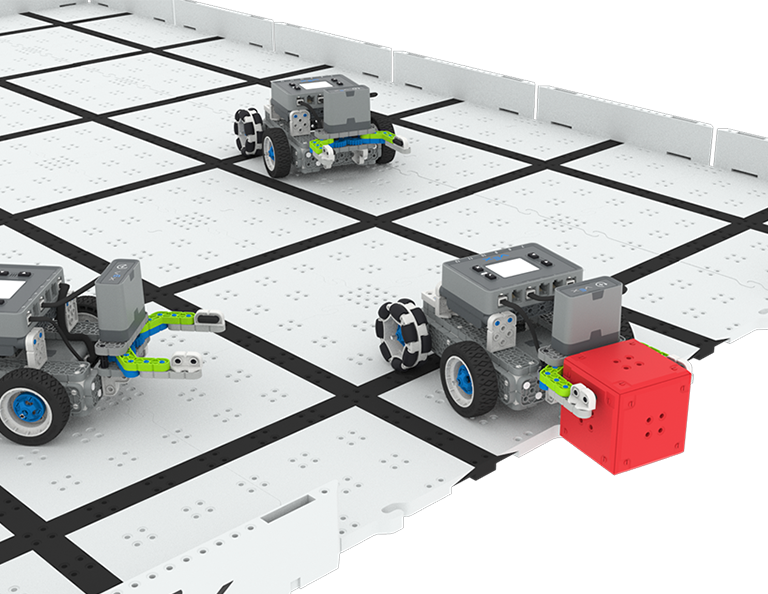
Руйнувач замку
6 Уроки
У цьому розділі ви дізнаєтесь, як використовувати оптичні датчики та датчики відстані, щоб шукати, руйнувати та розчищати кубичні «замки», щоб набирати очки в змаганні Castle Crasher!
Відвідайте Портал для вчителів, щоб отримати допоміжні матеріали для вчителів і відео про зміст і фасилітацію уроків Castle Crasher.

Lesson 1: Introduction
In this Lesson, you will be introduced to the Castle Crasher Competition, build the BaseBot, and get ready to code.

Lesson 2: Castle Crasher No Sensors
In this Lesson, you will learn about calculating angles and changing the velocity of your robot so that you can compete in the Tower Over Challenge.

Lesson 3: Castle Crasher + Distance Sensor
In this Lesson you will learn about what the Distance Sensor is and how it can be used on your robot. You will also learn about the [Wait until] block and how it can be used in a VEXcode IQ project. Then you will apply what you have learned to compete in the Cube Crasher Challenge!

Lesson 4: Creating Algorithms
In this Lesson, you will learn about the Optical Sensor, and about how to create an algorithm that uses sensor feedback. Then you will code your robot to autonomously find cubes and push them off the Field in the Sweep the Field Challenge.

Lesson 5: Castle Crasher Competition
In this Lesson you will apply your learning from the previous Lessons to compete in a Castle Crasher competition!
Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
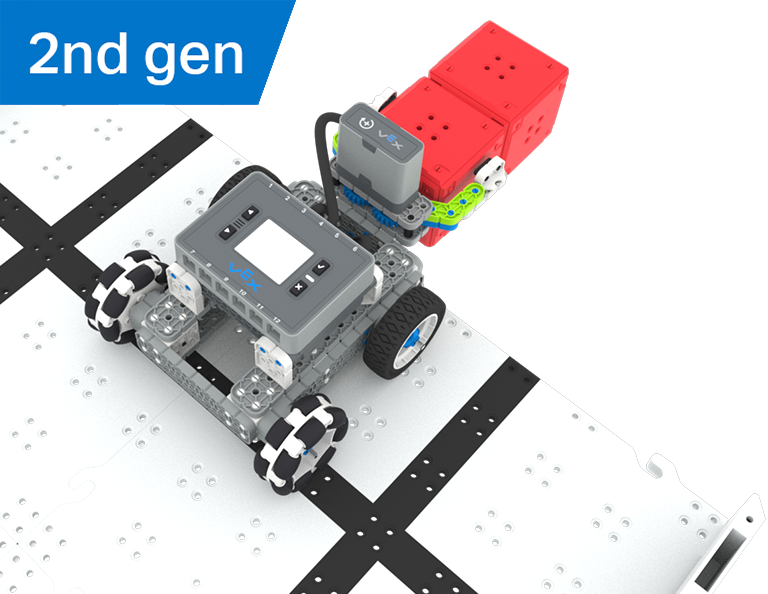
Полювання за скарбами
5 Уроки
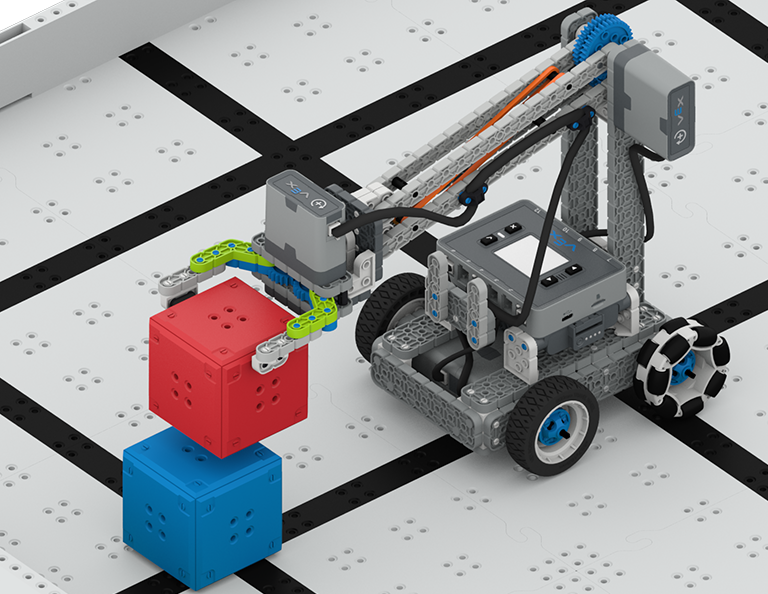
У цьому підрозділі ви створите та закодуєте Simple Clawbot з оптичним датчиком, щоб розпізнавати та збирати червоні кубики, щоб взяти участь у змаганні «Полювання за скарбами»!
Відвідайте Портал для вчителів, щоб отримати допоміжні матеріали та відео для вчителів про зміст уроків «Пошук за скарбами» та їх проведення.
Lesson 1: Introduction
You will be introduced to the Treasure Hunt competition, build the Simple Clawbot, and get ready to code.
Lesson 2: Claw No Sensor
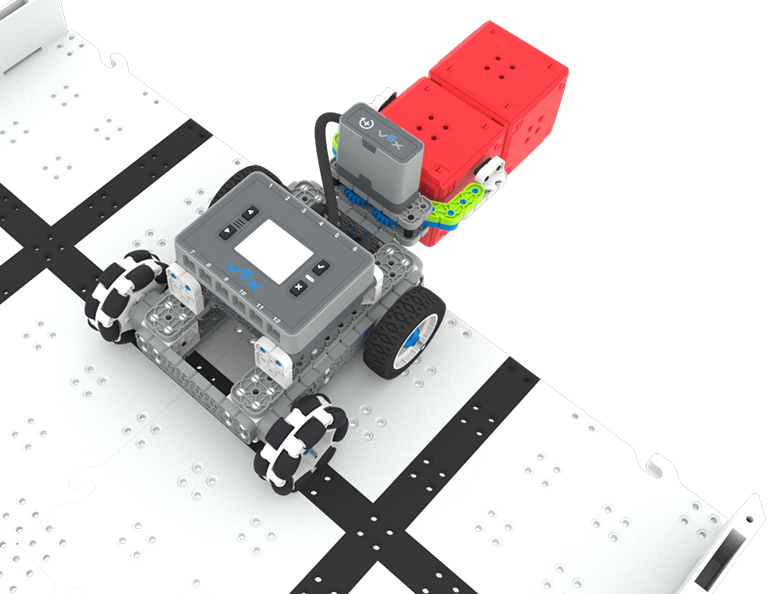
In this Lesson, you will learn about using Drivetrain and Motion blocks in VEXcode IQ to code your Simple Clawbot to collect and move cubes in the Clawbot Collector challenge.
Lesson 3: Claw With Sensor
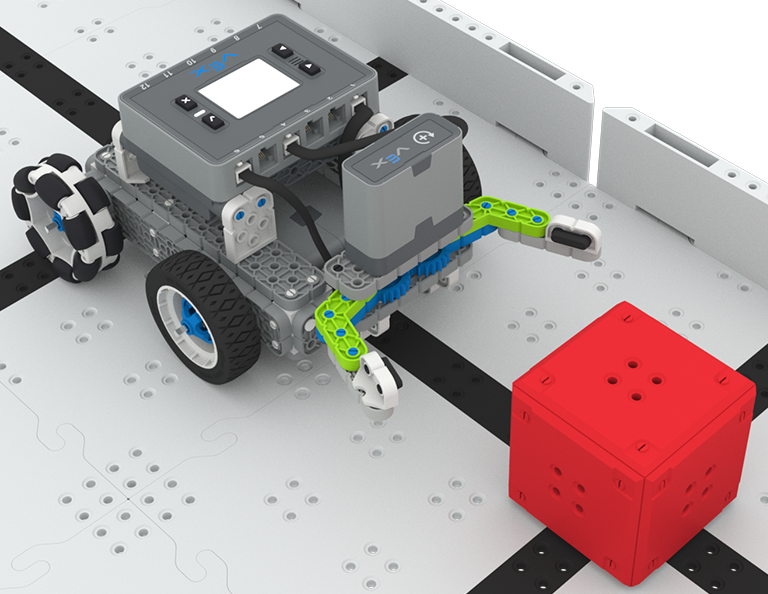
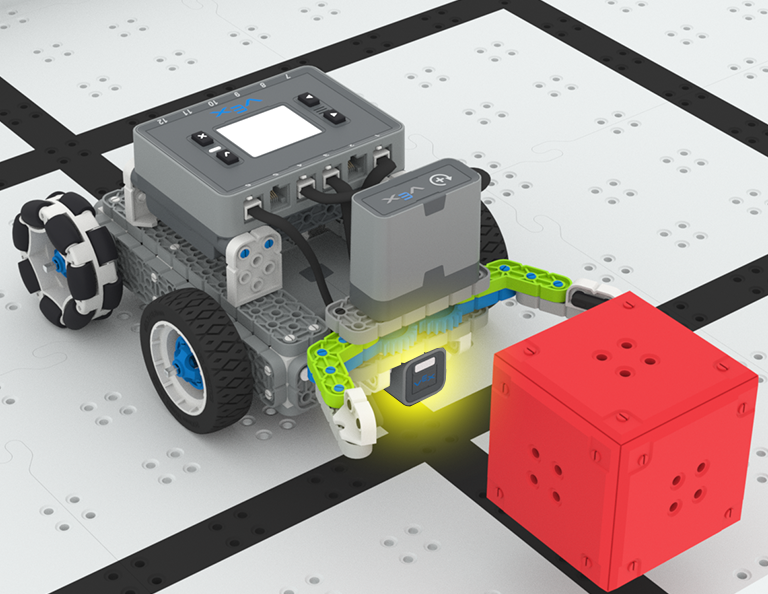
In this Lesson, you will learn about coding the Optical Sensor in order to detect, collect, and move a red cube in the Treasure Mover challenge!
Lesson 4: Treasure Hunt Competition
In this Lesson you will apply your learning from the previous Lessons to compete in a Treasure Hunt competition!
Lesson 5: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
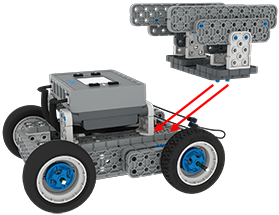
Воєнний буксир
6 Уроки
У цьому розділі ви дослідите, як механічна перевага та центр маси впливають на здатність BaseBot тягнути об’єкти, і створите найкращого робота для гри в перетягування канату!
Відвідайте Портал для вчителів, щоб отримати допоміжні матеріали та відео для вчителів про зміст уроків перетягування канату та їх проведення.
Lesson 1: Introduction
In this Lesson, you will be introduced to the Tug of War competition and build the BaseBot.
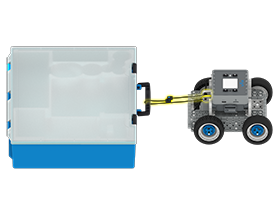
Lesson 2: Pulling Objects with the BaseBot
In this Lesson, you will design a rope attachment to practice pulling objects with your BaseBot. Then you will compete in a Robot Tractor Pull challenge.

Lesson 3: Using a Gear Train
In this Lesson, you will add a gear train to your BaseBot to explore how different gear configurations affect your robot's ability to pull an object. Then you will compete in a Gear Train Tractor Pull challenge.
Lesson 4: Adding Mass
In this Lesson, you will add mass to your BaseBot to explore how changing the center of mass affects your robot's ability to pull an object. Then you will compete in a Tug of War challenge.
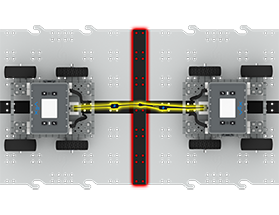
Lesson 5: Tug of War Competition
In this Lesson, you will apply your learning from the previous Lessons to compete in a Tug of War competition!
Lesson 6: Conclusion
In this Lesson, you will reflect on your learning in this Unit and identify connections between what you have done and a STEM career.