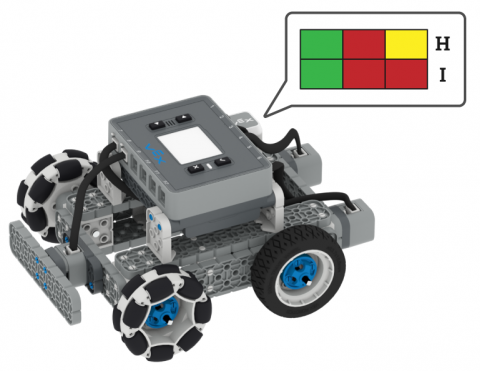

Gửi tin nhắn bí mật bằng đèn LED cảm ứng.
Activity Link
https://docs.google.com/document/d/18gHMwtnQ6tNGIEtDHfP2x6dWPlNb8svn1bVWPz4YXx0/edit#
Activity Image
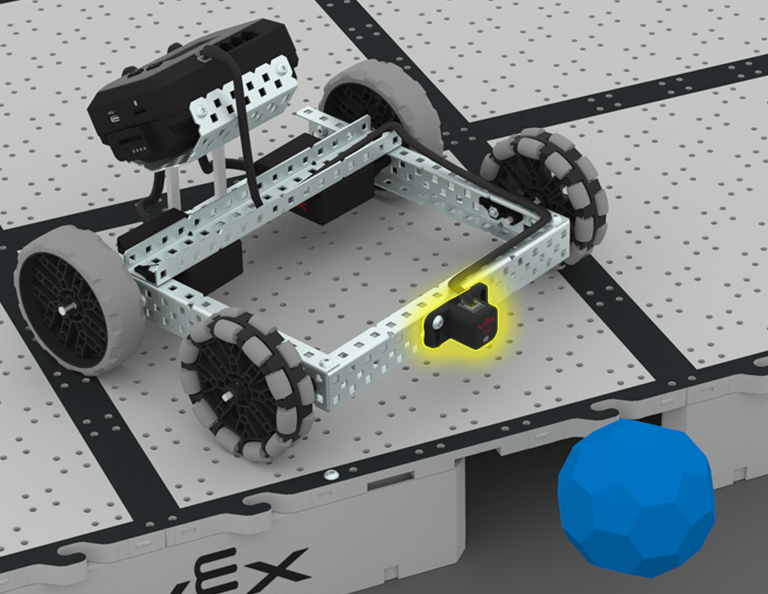
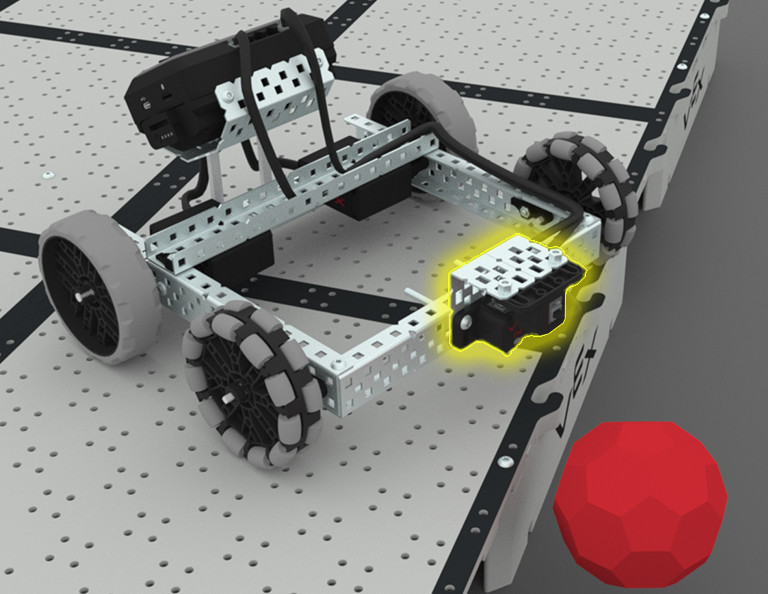
Ảnh

VEX Platform
Subject
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Python Activity - Code a Code.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Python Activity - Code a Code.docx
Activity Image Alt
Bộ não robot IQ được kết nối với đèn LED cảm ứng.