
Souvislosti
Mars Rover: Landing Challenge Unit vyzve vaše studenty k vybudování projektů VEXcode 123 k vyřešení problému. Tato jednotka seznamuje studenty s používáním očního senzoru na přední straně robota 123 Robot ve výzvě inspirované procesem, který vědci používají při pokusu o přistání kosmické lodi, jako je rover Mars 2020 Perseverance. Studenti naprogramují robota 123, aby detekoval překážku, a pak rozsvítí barvu, která indikuje, že na místě přistání byla nalezena překážka.
Mise NASA Mars 2020
Mise NASA Mars 2020 se zabývá vědeckými cíli s vysokou prioritou pro průzkum Marsu: život, klima, geologie a lidé. Než však bude moci rover Perseverance zahájit svou misi shromažďování vzorků hornin a půdy na povrchu, musí bezpečně přistát na Rudé planetě.
Podle NASA bylo pouze asi 40% misí vyslaných na Mars (jakoukoli kosmickou agenturou) úspěšných. Celý proces vstupu, sestupu a přistání bude trvat jen několik minut, ale kosmická loď nesoucí rover Perseverance musí zpomalit z téměř 20 000 km/h (~12 500 mil za hodinu) na nulu a najít otevřenou rovnou plochu k přistání. Marťanský povrch je plný překážek — mohutných impaktních kráterů, útesů, trhlin a zubatých balvanů. Nepředvídatelné větry mohou také vyvolat další komplikace.

Aby bylo zajištěno bezpečné přistání, bude rover Perseverance při sestupu pořizovat snímky a porovná je s mapami. Rychle se může rozhodnout, zda byla tato oblast vědci označena za nebezpečnou, a provést úpravy půdy na volném prostranství. Podívejte se na video níže, kde se dozvíte, jak má rover přistát.
V této jednotce budou studenti kódovat 123 Robot pro detekci překážek na místech přistání na jejich 123 polích, aby pomohli zajistit bezpečné přistání roveru.
Co je senzor?
Senzor je v podstatě zařízení, které pomáhá robotovi porozumět okolnímu světu. Dělá to shromažďováním a vykazováním údajů o svém prostředí, které pak mohou být použity v projektu k rozhodování robota nebo k provádění určitých chování. Tuto sekvenci lze považovat za smyčku rozhodování Sense → Think → Act.
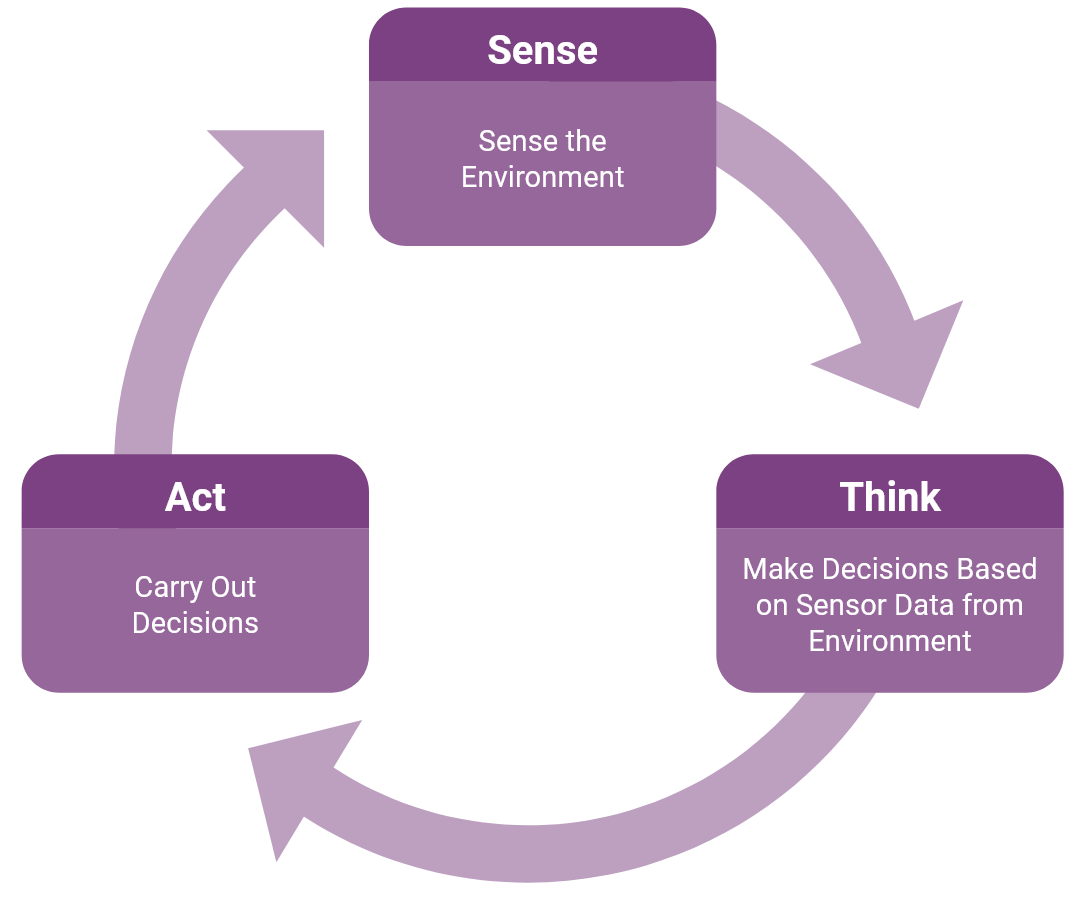 Smyčka rozhodování
Smyčka rozhodování V této jednotce bude robot 123 detekovat objekty na poli 123, aby pomohl vyčistit prostor pro bezpečné přistání roveru. Studenti projektu vytvoří tuto smyčku, protože oční senzor detekuje přítomnost objektu , pak VEXcode 123 přikazuje myslet a rozhodovat se na základě toho, zda oční senzor detekuje objekt nebo ne, a pak robot 123 bude jednat tím, že bude mít tlačítko na záři robota.
Co je to oční senzor?
Oční senzor na robotu 123 je umístěn na přední straně pod bílou šipkou. Oční senzor lze použít k detekci přítomnosti nebo nepřítomnosti objektu, stejně jako jeho barvy nebo úrovně jasu.

Oční senzor používá k detekci objektů infračervené světlo. Světlé objekty odrážejí infračervené světlo a jsou snadněji detekovány očním senzorem. Tmavě zbarvené objekty absorbují infračervené světlo a oční senzor je také nedetekuje. Během jednotky použijte bílý nebo světle zbarvený papír pro překážky, abyste zajistili, že oční senzor bude schopen tyto objekty detekovat.
V této jednotce bude oční senzor použit k detekci přítomnosti objektu v dráze robota 123. Poloha očního senzoru na robotu 123 znamená, že může detekovat pouze objekty přímo před ním. Mějte to na paměti, když umisťujete svých 123 robotů a překážek se svými studenty tak, aby materiály připravovaly studenty na úspěch.
Další informace o tom, jak kódovat oční senzor pomocí VEXcode 123, naleznete v článku Kódování očního senzoru VEXcode 123 pomocí knihovny VEXcode 123 VEX Library.
Co je VEXcode 123?
VEXcode 123 je blokový programovací jazyk používaný s robotem 123. Programovací jazyk je soubor pravidel, ve kterých symboly představují akce. Programovací jazyky postupují podle podrobných pokynů, které počítač provede, aby mohl být projekt spuštěn.
Další informace o tom, jak pracovat s VEXcode 123, naleznete v části VEXcode 123 knihovny VEX.
Jaké bloky VEXcode 123 potřebujete?
Bloky ve VEXcode 123 představují 123 robotických příkazů, které se používají k vytvoření projektu ve VEXcode 123. Níže je uveden seznam hlavních bloků použitých během této jednotky.
| Bloky VEXcode 123 | Chování |
|---|---|
 |
{When started} Blok začne spouštět připojený stoh bloků při zahájení projektu. |
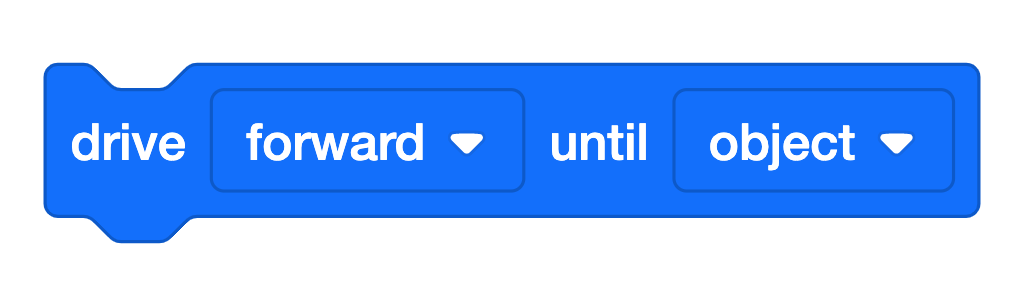 |
Blok [Drive until] pohání robota 123, dokud není splněna jedna ze tří podmínek.
|
 |
Blok [Turn for] (Otočit pro) otočí robota 123 na místo doleva nebo doprava na zadaný počet stupňů. |
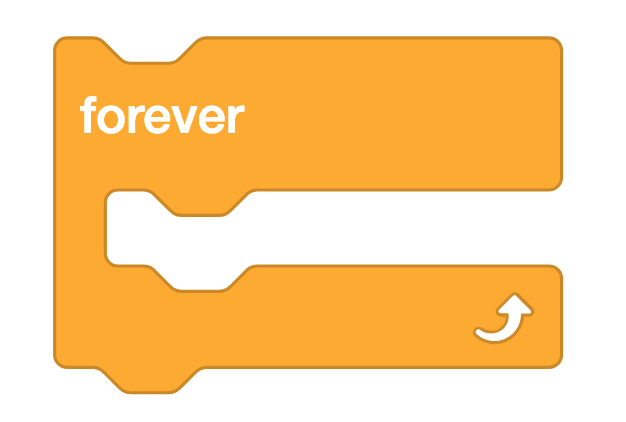 |
Blok [Navždy] navždy opakuje všechny bloky obsažené uvnitř „C“. |
![[Wait] blok](/stemlabs/sites/default/files/inline-images/%5BWait%5D.png) |
Blok [Wait] čeká po určitou dobu, než se přesune do dalšího bloku v projektu. |
 |
Blok [Glow] nastavuje barvu záře kontrolky ve středu robota 123. |
Jak funguje blok [Drive until]?
Bloky [Drive until] opakovaně kontrolují stav a řídí tok projektu. Projekt se nepřesune do dalšího bloku v zásobníku, dokud nebude splněna podmínka bloku [Drive]. V níže uvedeném projektu pojede robot 123 vpřed a bude průběžně kontrolovat, zda oční senzor detekoval objekt. Jakmile je objekt detekován očním senzorem, robot 123 přestane řídit a přesune se do dalšího bloku, bloku [Glow].
 Průtok
Průtok Lze nastavit podmínku, která zastaví jízdu robota 123. Tato jednotka používá parametr „objekt“, takže robot přestane řídit, když oční senzor na přední straně robota 123 detekuje objekt.
![Blok [Drive until] se zobrazeným rozevíracím seznamem parametrů. Volby jsou objekt, pád a čára. Výběr objektu je zvýrazněn černým zaškrtnutím.](/stemlabs/sites/default/files/inline-images/Drive%20until%20s%20parameters.png) Blok
Blok Příprava na otevřenou výzvu v této jednotce
V této jednotce budou studenti požádáni, aby použili to, co se naučili dříve, k vytvoření projektu k vyřešení výzvy. Vzhledem k tomu, že je důležité pravidelně vyzývat studenty, aby řešili problémy a uplatňovali dovednosti, které se učí novým způsobem, doporučujeme vám, abyste vyzvali své studenty a používali tyto strategie k vybudování odolnosti a pomohli jim projít výzvou. Zde je několik návrhů, které studentům pomohou při experimentování s jejich projekty:
Poskytněte zpětnou vazbu, aniž byste poskytli řešení - Očekává se a doporučuje se dělat chyby při práci na výzvě. „Chyby ve výuce mohou vytvářet příležitosti, [a] mohou pomoci realizovat spojení.“1 Vytvoření známého procesu řešení problémů se svými studenty jim může pomoci zjistit, jak identifikovat problém a posunout se vpřed, když udělají chybu, čímž se minimalizuje narušení a frustrace. Zkuste se svými studenty použít následující cyklus řešení problémů, který jim pomůže vyřešit jejich projekty a přijít s vlastními řešeními.
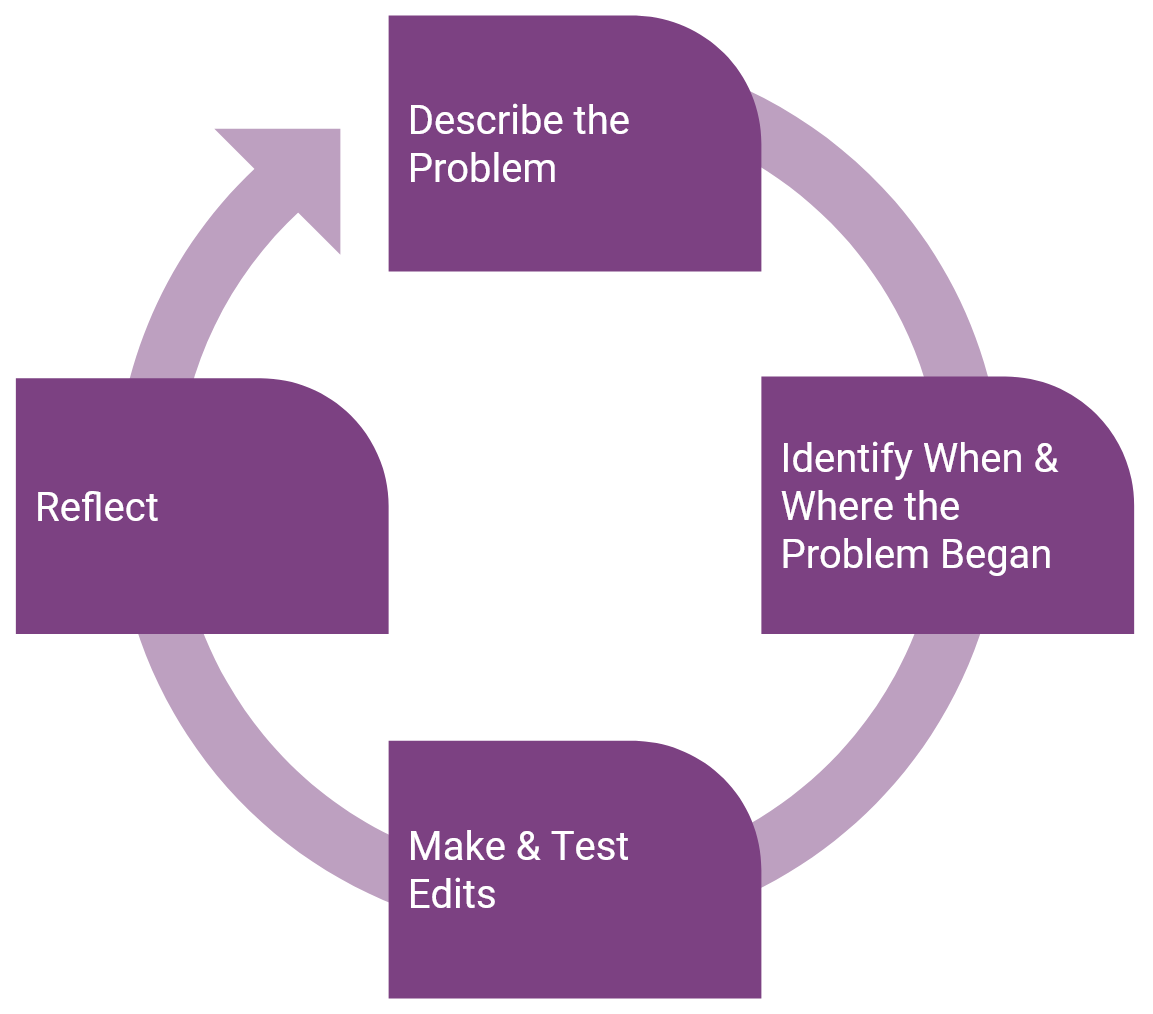 Cyklus řešení problémů
Cyklus řešení problémů - Popište problém
- Požádejte studenta, aby vysvětlil, co je špatně. Studenti by měli být schopni vztáhnout chybu zpět ke společnému cíli nebo k aktuální výzvě.
- Jak se pohybuje 123 Robot ve svém projektu? Jak by se měl robot pohybovat?
- Požádejte studenta, aby vysvětlil, co je špatně. Studenti by měli být schopni vztáhnout chybu zpět ke společnému cíli nebo k aktuální výzvě.
- Zjistěte, kdy a kde problém začal
- Zeptejte se studenta, kdy si poprvé všiml problému.
- Která část projektu byla realizována?
- Pokud mají studenti potíže určit, kde v projektu je chyba, povzbuďte je, aby použili funkci Krokování projektu ve VEXcode 123. Vizuální podněty dodávané s funkcí Project Stepping mohou být použity k tomu, aby pomohly studentům řešit jejich projekt tím, že budou mít možnost vidět, jak jsou bloky prováděny jeden po druhém. To jim poskytne lepší přehled o tom, které bloky mohou být příčinou chyby, takže ladění se může stát cílenějším a efektivnějším procesem. Další informace o tom, jak používat funkci Krokování projektu, naleznete v článku Krokování projektem v knihovně VEXcode 123 VEX Library.
- Zeptejte se studenta, kdy si poprvé všiml problému.
- Provést & testovací úpravy
- Když studenti najdou chybu, měli by svůj projekt upravit. Studenti mohou projekt otestovat s každou provedenou úpravou. Pokud je projekt úspěšný, mohou přejít k dalšímu kroku v cyklu řešení problémů. Pokud projekt neuspěje, může se vrátit na začátek procesu a zkusit to znovu.
- Reflexe
- Požádejte studenty, aby přemýšleli o chybě, kterou během procesu udělali a překonali.
- V čem byla chyba? Co jste se z této chyby naučili? Jak vám to může pomoci při kódování robota 123 příště?
- Povzbuzujte studenty, aby rozpoznali své chyby a to, co se z procesu naučili, a podpořili tak růstové myšlení. Silný důraz na růstové myšlení může studentům pomoci naučit se, kdy a jak přetrvávat, a také, kdy požádat o pomoc.2 Pokud mohou studenti vidět svůj proces jako předchůdce nového učení, mohou zde použít kroky k dalšímu vlastnímu učení, stejně jako k dalšímu učení svých spolužáků. Jak se studenti setkávají s těmito problémy a přemýšlejí o svých chybách, povzbuzujte je, aby sdíleli své chyby a proces s ostatními studenty. Tímto způsobem se studenti mohou stát „vzdělávacími zdroji jeden pro druhého.“3
- Požádejte studenty, aby přemýšleli o chybě, kterou během procesu udělali a překonali.
Vyčistěte přistávací plochu (laboratoř 2) je navržena tak, aby byla otevřeným průzkumem, který požádá vaše studenty, aby vytrvali při řešení problému. V této laboratoři představujeme smyčky s blokem [Forever] a žádáme studenty, aby experimentovali s používáním smyček ve svém projektu, aby měli 123 Robot řídit a detekovat všechny překážky na přistávací ploše (VEX 123 Field). Pokud je používání smyček v projektu pro vaše studenty nové, může trvat několik iterací jejich projektů, než smyčky využijí efektivně. Pomocí návrhů uvedených v této části připravte studenty na proces pokusů a omylů a pomozte jim řešit jejich projekty, aby dosáhli cíle výzvy. Sekce Usnadnění v části hry 1 a 2 obsahuje další instruktážní pomůcky pro vedení studentů výzvou Lab 2. Mít plán, jak budete poskytovat podporu pro řešení problémů a pokusů a omylů, které jsou vyžadovány v této laboratoři, vám může pomoci uspokojit individuální potřeby vašich studentů.
Více informací o tom, jak může efektivní zpětná vazba pomoci studentům budovat odolnost a růstové myšlení při práci prostřednictvím STEM Labs, naleznete v článku Building Resilience v STEM Labs VEX Library.
1 Hattie, John a Shirley Clarke. Viditelné učení: Zpětná vazba. Routledge, Taylor & Francis Group, 2019.
2 Tamtéž.
3 Tamtéž, s. 121.