
Pozadí
Jednotka Mars Rover: Landing Challenge vyzve vaše studenty k vytvoření projektů VEXcode GO, které vyřeší nějaký problém. Tato lekce seznamuje studenty s používáním očního senzoru na přední straně kódové základny v rámci výzvy, inspirované postupem, který vědci používají při pokusech o přistání kosmických lodí, jako je například rover Perseverance na Marsu 2020. Studenti naprogramují kódovou bázi pro detekci překážky a poté zastaví řízení, aby signalizovali, že na místě přistání byla nalezena překážka.
Mise NASA Mars 2020
Mise NASA Mars 2020 se zaměřuje na vysoce prioritní vědecké cíle pro výzkum Marsu: život, klima, geologii a lidstvo. Než ale rover Perseverance může zahájit svou misi sběru vzorků hornin a půdy na povrchu, musí bezpečně přistát na rudé planetě.
Podle NASA bylo úspěšných pouze asi 40 % misí, které kdy byly na Mars vyslány (jakoukoli vesmírnou agenturou). Celý proces vstupu, sestupu a přistání bude trvat jen několik minut, ale kosmická loď s roverem Perseverance musí zpomalit z téměř 20 000 km za hodinu (cca 12 500 mil za hodinu) na nulu a najít otevřenou, rovnou plochu k přistání. Povrch Marsu je plný překážek – masivních impaktních kráterů, útesů, prasklin a rozeklaných balvanů. Nepředvídatelný vítr může také způsobit další komplikace.

Aby bylo zajištěno bezpečné přistání, bude rover Perseverance během sestupu pořizovat snímky a porovnávat je s mapami. Dokáže rychle rozhodnout, zda vědci danou oblast označili za nebezpečnou, a provést úpravy pro přistání v otevřeném prostoru. Pro lepší pochopení rozhodovacího procesu roveru s využitím fotografií z doby sestupu si prohlédněte animaci níže.
V této lekci budou studenti kódovat kódovou bázi pro detekci překážek na přistávacích místech na svých polích, aby zajistili bezpečné přistání roveru.
Co je to senzor?
Senzor je v podstatě zařízení, které pomáhá robotovi porozumět světu kolem něj. Dělá to tak, že shromažďuje a hlásí data o svém prostředí, která pak lze použít v projektu, aby robot činil rozhodnutí nebo vykonával určité chování. Tuto sekvenci lze považovat za rozhodovací smyčku Smysl → Myslet → Jednat.
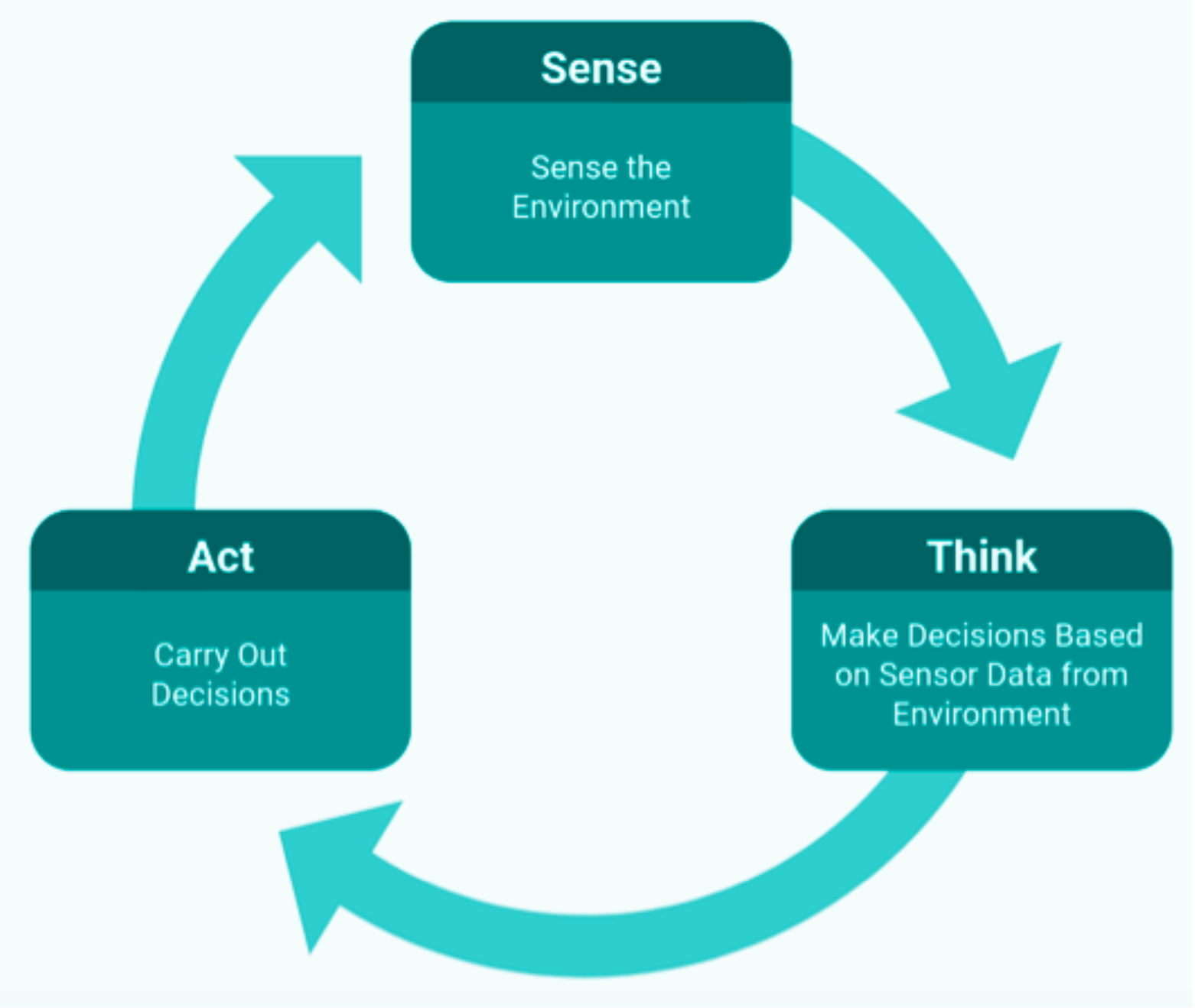
V této jednotce bude kódová základna používat oční senzor k detekci objektů na poli, což pomůže vyčistit prostor pro bezpečné přistání roveru. Projekt, který studenti vytvoří, provede tuto smyčku, kdy oční senzor v kódové bázi detekuje přítomnost objektu, poté VEXcode GO vydá příkaz Think , aby se rozhodl na základě toho, zda oční senzor objekt detekoval či nikoli. Pak kódová báze krok a zastaví jízdu na základě přítomnosti objektu.
Co je oční senzor?
Eye Sensorje senzor, který dokáže určit tři věci – přítomnost objektu, jeho barvu a jas objektu nebo povrchu. V této jednotce se oční senzor používá k detekci objektu, aby mohl být odstraněn z přistávací plochy. Data hlášená očním senzorem lze zobrazit v monitorovací konzoli, která studentům nabízí vizuální znázornění toho, co robot „vidí“, a lze ji použít k propojení mezi senzory a chováním robota. Další informace o používání konzole Monitor Console ve VEXcode GO naleznete v tomto článku knihovny VEX.
Snímač oka na základně Code Base – sestavení Eye Forward se nachází na přední straně, jak je znázorněno na obrázku níže. Oční senzor lze použít k detekci přítomnosti nebo nepřítomnosti objektu, stejně jako jeho barvy nebo úrovně jasu.
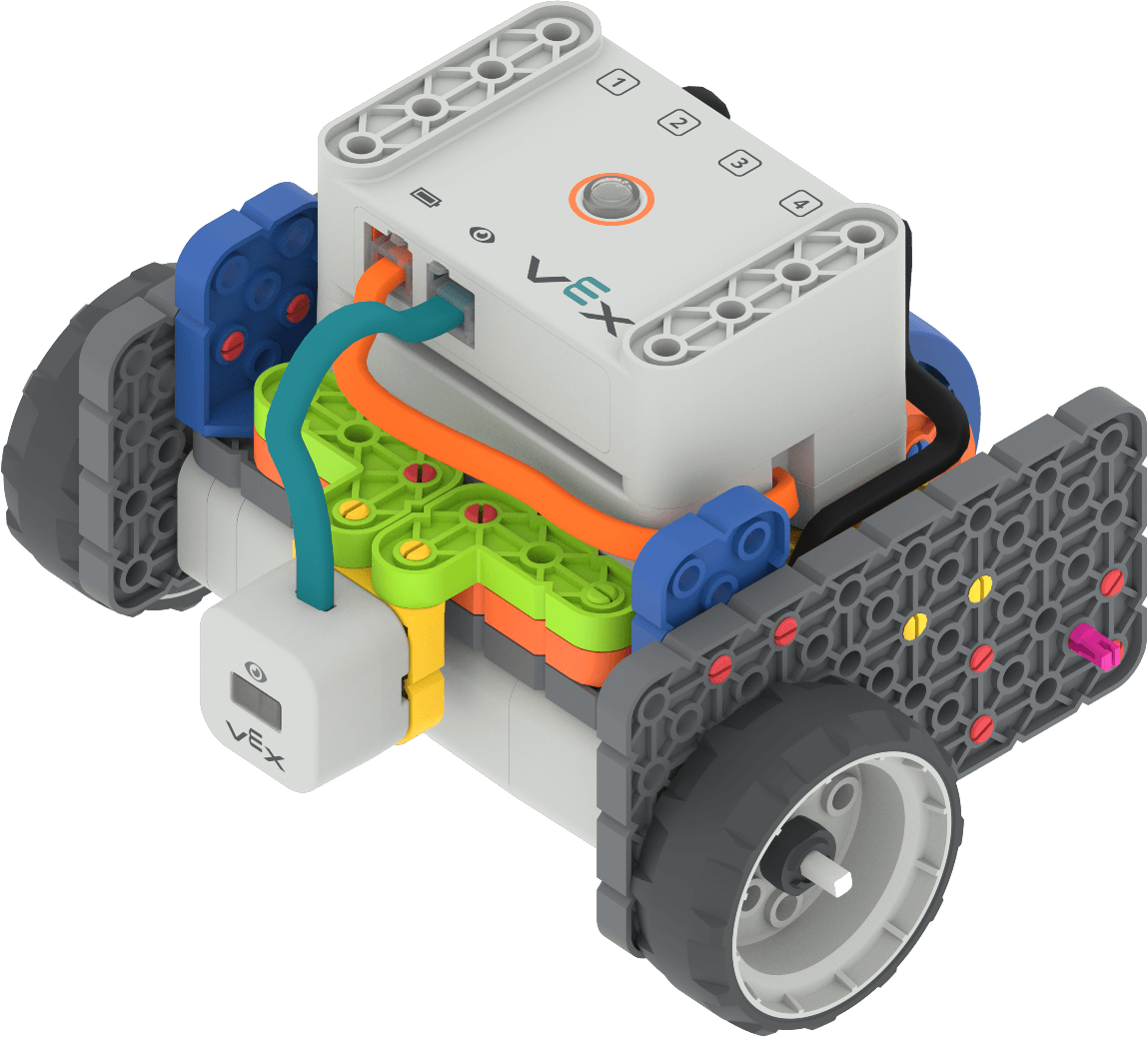
Oční senzor využívá k detekci objektů infračervené světlo. Světlé objekty odrážejí infračervené světlo a jsou snáze detekovány očním senzorem. Tmavě zbarvené objekty absorbují infračervené světlo a senzor oka je tak dobře nedetekuje. Během této jednotky použijte bílý nebo světlý papír na označení překážek, aby oční senzor dokázal tyto objekty detekovat.
V této lekci bude oční senzor použit k detekci přítomnosti objektu v cestě kódové báze. Umístění očního senzoru na kódové základně znamená, že dokáže detekovat pouze objekty přímo před sebou. Mějte to na paměti, když studentům dáváte k dispozici svůj kód a překážky, aby je materiály připravily na úspěch.
Více informací o očním senzoru a jeho fungování naleznete v článkuKódování s očním senzorem VEX GOKnihovna VEX.
Co je VEXcode GO?
VEXcode GO je kódovací prostředí, které se používá ke komunikaci s roboty VEX GO. Studenti používají rozhraní drag and drop k vytváření projektů VEXcode GO, které ovládají akce jejich robotů. Účel každého bloku lze identifikovat pomocí vizuálních podnětů, jako je jeho tvar, barva a označení. Více informací o práci s VEXcode GO naleznete v sekci VEXcode GO v knihovně VEX.
Bloky ve VEXcode GO představují robotické příkazy, které se používají k vytvoření projektu ve VEXcode GO. Níže je uveden seznam hlavních bloků použitých v této jednotce.
| Bloky VEXcode GO | Chování |
|---|---|
 |
Blok {When started} začne spouštět připojený zásobník bloků při spuštění projektu. |
 |
Blok [Drive] posouvá hnací ústrojí dopředu nebo dozadu navždy. |
 |
Blok [Otočit o] otočí hnací ústrojí o danou vzdálenost. |
 |
Blok [Forever] opakuje všechny bloky obsažené uvnitř písmene 'C' navždy. |
 |
Blok [Wait] čeká po určitou dobu, než se přesune k dalšímu bloku v projektu. |
 |
Blok [Wait until] čeká, až podmínka uvnitř něj nahlásí hodnotu TRUE, než se přesune k dalšímu bloku. |
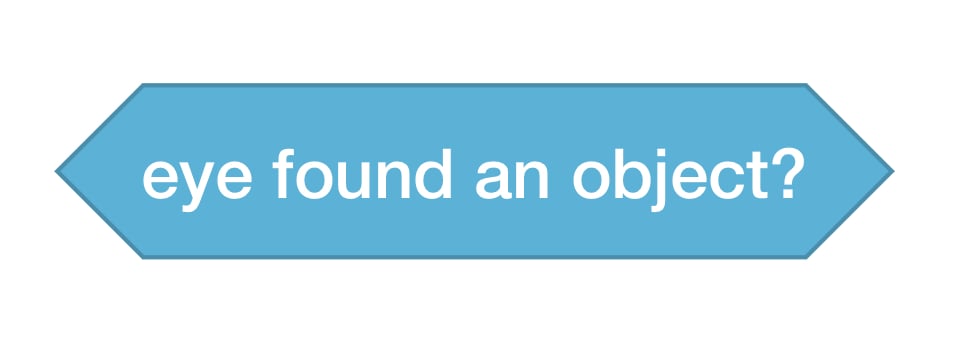 |
Blok <Found object> hlásí, zda senzor oka detekuje objekt. |
 |
Blok [Zastavit jízdu] zastaví hnací ústrojí. |
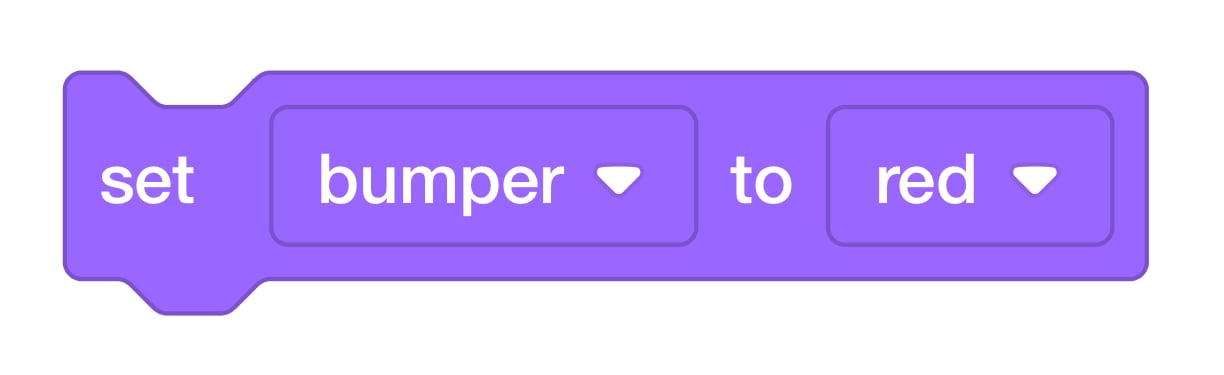 |
Blok [Nastavit barvu nárazníku] nastavuje barvu LED nárazníku. |
Jak blok [Čekat do] funguje se senzorem oka?
V této lekci studenti použijí oční senzor na kódové základně k detekci překážek v přistávací oblasti roveru Mars. K napsání tohoto kódu použijí v projektu blok [Wait until]. Blok [Čekat do] je řídicí blok, který opakovaně kontroluje podmínku pro řízení průběhu projektu. Projekt se nepřesune do dalšího bloku, dokud podmínka v bloku [Čekat do] nebude hlášena jako pravdivá. V této jednotce je použit blok [Wait until] s podmínkou bloku<Found object> – takže se bude čekat, dokud senzor oka nedetekuje objekt a podmínka bloku <Found object> nebude pravdivá – a poté se v projektu přesune k dalšímu bloku.
Bloky [Wait until] lze použít ve spojení s nečekajícími bloky, jako je blok [Drive] v této jednotce, takže kódová báze může postupovat vpředdokud senzor oka nedetekuje objekt. Podívejte se na animaci níže, kde uvidíte blok [Čekat do], který brání robotovi v nárazu do překážky.
Chcete-li sledovat průběh projektu v reálném čase za chodu robota, sledujte funkci Highlight ve VEXcode GO. Na začátku projektu se kolem bloku [Čekat, dokud] neobjeví zelené zvýraznění, dokud podmínka nebude splněna. Zelené zvýraznění se objeví, aby se přeskočily bloky, které nečekají (v tomto případě blok [Drive]), protože tyto příkazy se provedou rychle.
V této lekci budou studenti ve svých projektech používat kombinaci bloků čekání, jako je blok [Čekat do], a bloků bez čekání, jako je blok [Jezdit], k dokončení aktivit a úkolů v laboratoři. Chcete-li se dozvědět více o čekajících a nečekajících blocích ve VEXcode GO, přečtěte si tento článek knihovny VEX.
Příprava na otevřenou výzvu v této jednotce
V této lekci budou studenti požádáni, aby využili to, co se dříve naučili, k vytvoření projektu, který vyřeší určitý problém. Protože je důležité pravidelně studenty vyzývat k řešení problémů a k aplikaci dovedností, které se učí, novým způsobem, doporučujeme vám, abyste své studenty vyzývali a používali tyto strategie k budování odolnosti a pomohli jim tuto výzvu zvládnout. Zde je několik tipů, které studentům pomohou při experimentování s jejich projekty:
Poskytněte zpětnou vazbu bez uvedení řešení -Dělání chyb při řešení problému je očekáváno a podporováno. „Chyby v učení mohou vytvářet příležitosti [a] mohou pomoci uvědomit si souvislosti.“1 Vytvoření známého procesu řešení problémů se studenty jim může pomoci naučit se, jak identifikovat problém a postupovat dál, když udělají chybu, a tím minimalizovat narušení a frustraci. Zkuste se svými studenty použít následující cyklus řešení problémů, který jim pomůže řešit problémy v jejich projektech a přijít s vlastními řešeními.
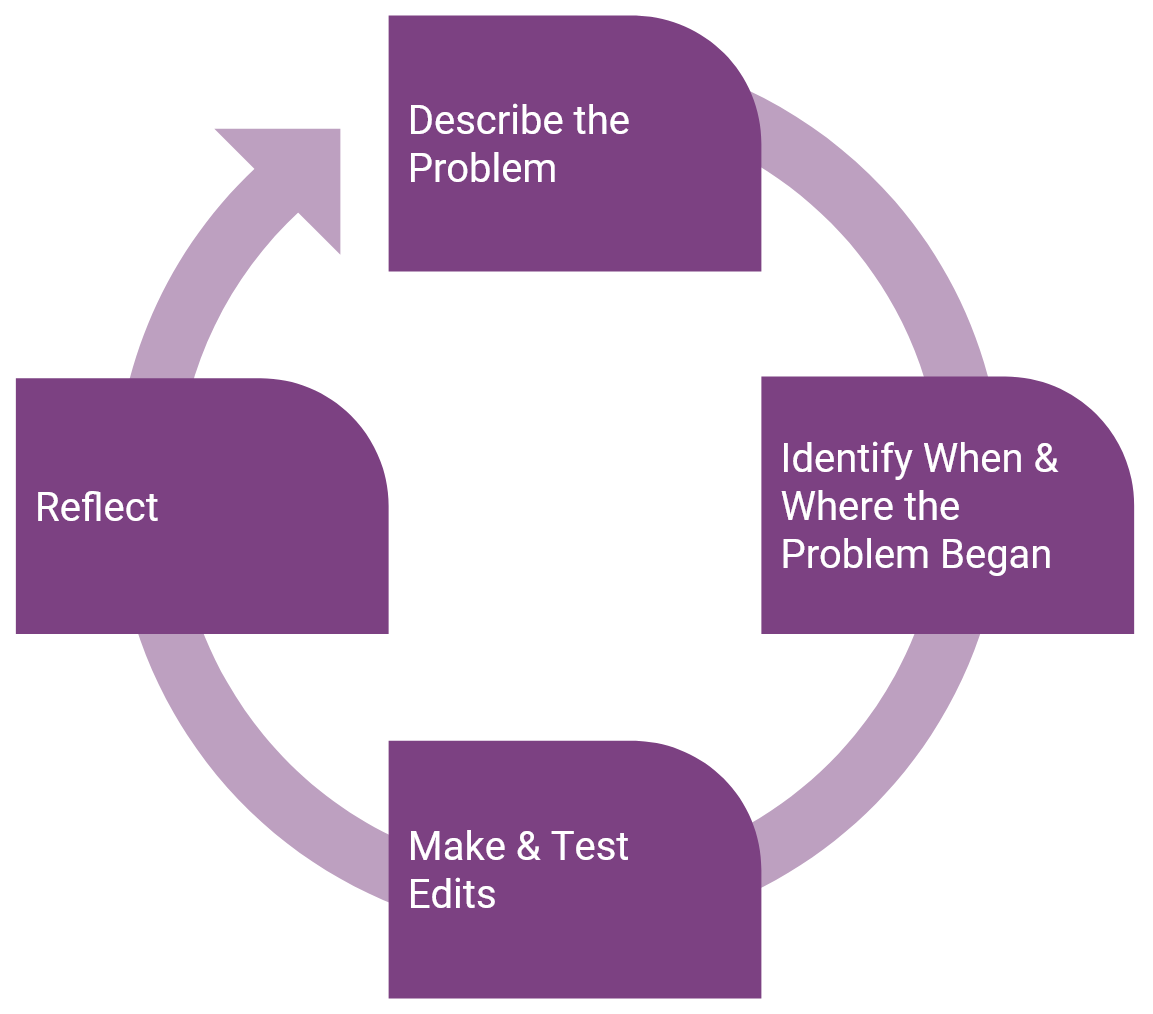
- Popište problém
- Požádejte studenta, aby vysvětlil, co je špatně. Studenti by měli být schopni chybu vztáhnout ke sdílenému cíli nebo danému problému.
- Jak se v jejich projektu posouvá kódová základna? Jak se měl pohybovat?
- Požádejte studenta, aby vysvětlil, co je špatně. Studenti by měli být schopni chybu vztáhnout ke sdílenému cíli nebo danému problému.
- Identifikujte, kdy a kde problém začal
- Zeptejte se studenta, kdy si problému poprvé všiml.
- Jaká část projektu se realizovala?
- Pokud mají studenti potíže s určením, kde v projektu je chyba, povzbuďte je k použití funkce Project Stepping ve VEXcode GO. Vizuální pomůcky poskytované funkcí Project Stepping mohou studentům pomoci s řešením problémů v jejich projektu, protože mají možnost vidět, jak se bloky provádějí jeden po druhém. Díky tomu získají lepší přehled o tom, které bloky mohou chybu způsobovat, takže ladění se může stát cílenějším a efektivnějším procesem. Další informace o používání funkce Krokování projektu naleznete v článku Krokování projektu v knihovně VEXcode GO VEX.
- Zeptejte se studenta, kdy si problému poprvé všiml.
- Provést & testovacích úprav
- Jakmile studenti najdou chybu, měli by svůj projekt upravit. Studenti si mohou projekt otestovat s každou provedenou úpravou. Pokud je projekt úspěšný, mohou přejít k dalšímu kroku v cyklu řešení problému. Pokud projekt nebude úspěšný, mohou se vrátit na začátek procesu a zkusit to znovu.
- Odrážet
- Požádejte studenty, aby se zamysleli nad chybou, které se během procesu dopustili a kterou překonali.
- Jaká byla chyba? Co jste se z této chyby naučili? Jak vám to může pomoci při příštím kódování kódové základny?
- Povzbuďte studenty, aby si uvědomili své chyby a to, co se z procesu naučili, a podpořte tak jejich růstové myšlení. Silný důraz na růstové myšlení může studentům pomoci naučit se, kdy a jak vytrvat a také kdy požádat o pomoc2Pokud studenti dokáží svůj proces vnímat jako předchůdce nového učení, pak mohou tyto kroky využít k podpoře vlastního učení i k podpoře učení svých spolužáků. Jakmile se studenti s těmito problémy setkají a přemýšlejí o svých chybách, povzbuďte je, aby se o své chyby a postup podělili se spolužáky. Tímto způsobem se studenti mohou stát „vzdělávacími zdroji jeden pro druhého“.3
- Požádejte studenty, aby se zamysleli nad chybou, které se během procesu dopustili a kterou překonali.
Cvičení Vyčistěte přistávací plochu (Lab 2) je navrženo jako otevřený průzkum, který bude od studentů vyžadovat vytrvalost při řešení určitého úkolu. V tomto cvičení si představíme smyčky s blokem [Forever] a požádáme studenty, aby si ve svém projektu vyzkoušeli jejich použití tak, aby kódová báze najela na všechny překážky na přistávací ploše (GO Field) a detekovala je. Pokud je používání cyklů v projektu pro vaše studenty nové, může trvat několik iterací jejich projektů, než je efektivní používání cyklů začnou používat. Použijte návrhy uvedené v této části k přípravě studentů na proces pokusů a omylů a k pomoci jim s řešením problémů v jejich projektech, aby dosáhli cíle dané výzvy. Sekce Facilitace v 1. a 2. části Hry obsahuje další instruktážní pomůcky, které studenty provedou úkolem 2. laboratoře. Plán, jak budete poskytovat podporu pro řešení problémů a metodu pokus-omyl, která je v tomto laboratoři vyžadována, vám může pomoci uspokojit individuální potřeby vašich studentů.
See the Building Resilience in STEM Labs VEX Library article for more information on how effective feedback can help students build resilience and a growth mindset while working through STEM Labs.
1 Hattie, John a Shirley Clarkeovi. Viditelné učení: Zpětná vazba. Routledge, Taylor & Francis Group, 2019.
2 Tamtéž.
3 Tamtéž, s. 121