
سوف تتحدى وحدة Mars Rover: Landing Challenge طلابك لبناء مشاريع VEXcode GO لحل مشكلة ما. تعرّف هذه الوحدة الطلاب على كيفية استخدام مستشعر العين الموجود في مقدمة قاعدة التعليمات البرمجية في التحدي، وهو مستوحى من العملية التي يستخدمها العلماء أثناء محاولتهم الهبوط بمركبة فضائية، مثل مركبة Mars 2020 Perseverance rover. سيقوم الطلاب بترميز قاعدة التعليمات البرمجية لاكتشاف أي عائق، ثم التوقف عن القيادة للإشارة إلى العثور على عائق في موقع الهبوط.
مهمة ناسا إلى المريخ 2020
تتناول مهمة ناسا للمريخ 2020 الأهداف العلمية ذات الأولوية العالية لاستكشاف المريخ: الحياة والمناخ والجيولوجيا والبشر. ولكن قبل أن تبدأ المركبة الجوالة "بيرسيفيرانس" مهمتها بجمع عينات من الصخور والتربة على السطح، تحتاج المركبة إلى الهبوط بأمان على الكوكب الأحمر.
وفقًا لوكالة ناسا، فإن حوالي 40% فقط من المهام التي تم إرسالها إلى المريخ (من قبل أي وكالة فضاء) كانت ناجحة. ستستغرق عملية الدخول والنزول والهبوط بأكملها دقائق فقط، لكن المركبة الفضائية التي تحمل المركبة الفضائية المثابرة تحتاج إلى إبطاء سرعتها من حوالي 20000 كيلومتر في الساعة (حوالي 12500 ميل في الساعة) إلى الصفر والعثور على منطقة مفتوحة ومسطحة للهبوط . إن سطح المريخ مليء بالعقبات - الحفر الضخمة، والمنحدرات، والشقوق، والصخور الخشنة. كما يمكن للرياح غير المتوقعة أن تثير المزيد من التعقيدات.

للمساعدة في ضمان الهبوط الآمن، ستلتقط المركبة الجوالة Perseverance صورًا أثناء الهبوط وتقارن تلك الصور بالخرائط. يمكنها أن تقرر بسرعة ما إذا كان العلماء قد قرروا أن هذه المنطقة خطرة، وإجراء تعديلات على الأرض في منطقة مفتوحة.
في هذه الوحدة، سيقوم الطلاب بترميز قاعدة التعليمات البرمجية لاكتشاف العوائق في مواقع الهبوط في الحقول الخاصة بهم للمساعدة في ضمان هبوط آمن للمركبة الجوالة.
ما هو المستشعر؟
المستشعر هو في جوهره جهاز يساعد الروبوت على فهم العالم من حوله. ويقوم بذلك عن طريق جمع البيانات حول بيئته والإبلاغ عنها، والتي يمكن بعد ذلك استخدامها في مشروع لجعل الروبوت يتخذ قرارات، أو يقوم بسلوكيات معينة. يمكن اعتبار هذا التسلسل بمثابة حلقة قرار تحسس → فكر → تصرف.
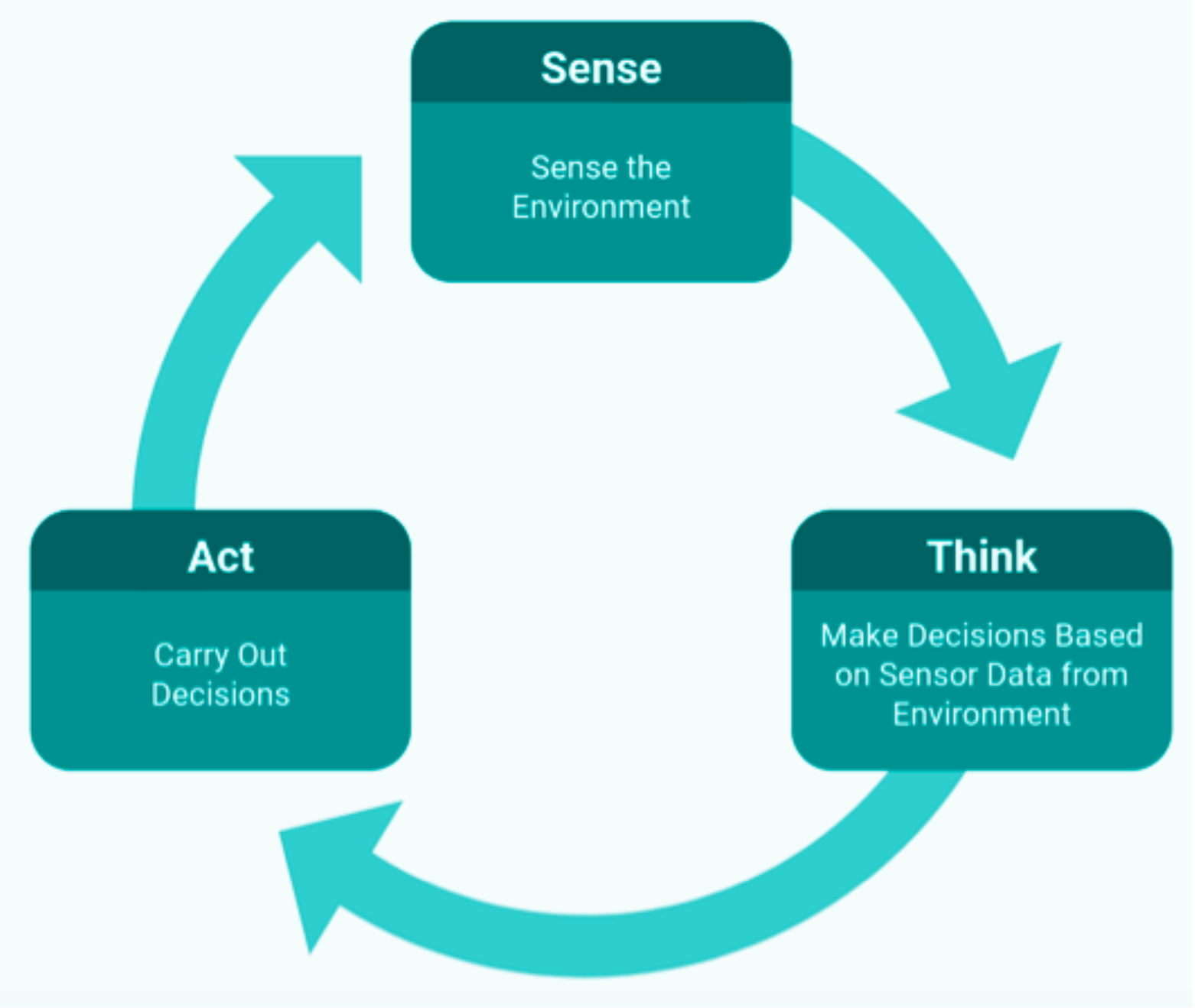
في هذه الوحدة، ستستخدم قاعدة الكود مستشعر العين في الميدان للمساعدة في إخلاء المنطقة من أجل هبوط آمن للمركبة الجوالة. ينفذ طلاب المشروع الذي ينشئونه هذه الحلقة حيث سيستشعر مستشعر العين الموجود في قاعدة الكود كائن ما، ثم يأمر VEXcode GO Think لاتخاذ قرار بناءً على ما إذا كان مستشعر العين يكتشف كائنًا أم لا. ثم تقوم قاعدة الكود الفصل والتوقف عن القيادة بناءً على وجود الكائن.
ما هو مستشعر العين؟
مستشعر العين هو مستشعر يمكنه تحديد ثلاثة أشياء - وجود جسم ما ولونه وسطوع جسم أو سطح. في هذه الوحدة، يتم استخدام مستشعر العين لاكتشاف الجسم بحيث يمكن إزالته من منطقة الهبوط. يمكن رؤية البيانات التي تم الإبلاغ عنها بواسطة مستشعر العين في وحدة التحكم في الشاشة، والتي تقدم للطلاب تمثيلاً مرئيًا لما "يراه" الروبوت، ويمكن استخدامها لمساعدتهم على إنشاء اتصال بين المستشعرات وسلوكيات الروبوت . لمزيد من المعلومات حول استخدام وحدة تحكم المراقبة في VEXcode GO، راجع مقالة مكتبة VEX هذه.
يقع مستشعر العين الموجود على قاعدة الكود - Eye Forward build على الجانب الأمامي، كما هو موضح في الصورة أدناه. يمكن استخدام مستشعر العين للكشف عن وجود أو عدم وجود كائن ما، بالإضافة إلى لونه أو مستوى سطوعه.
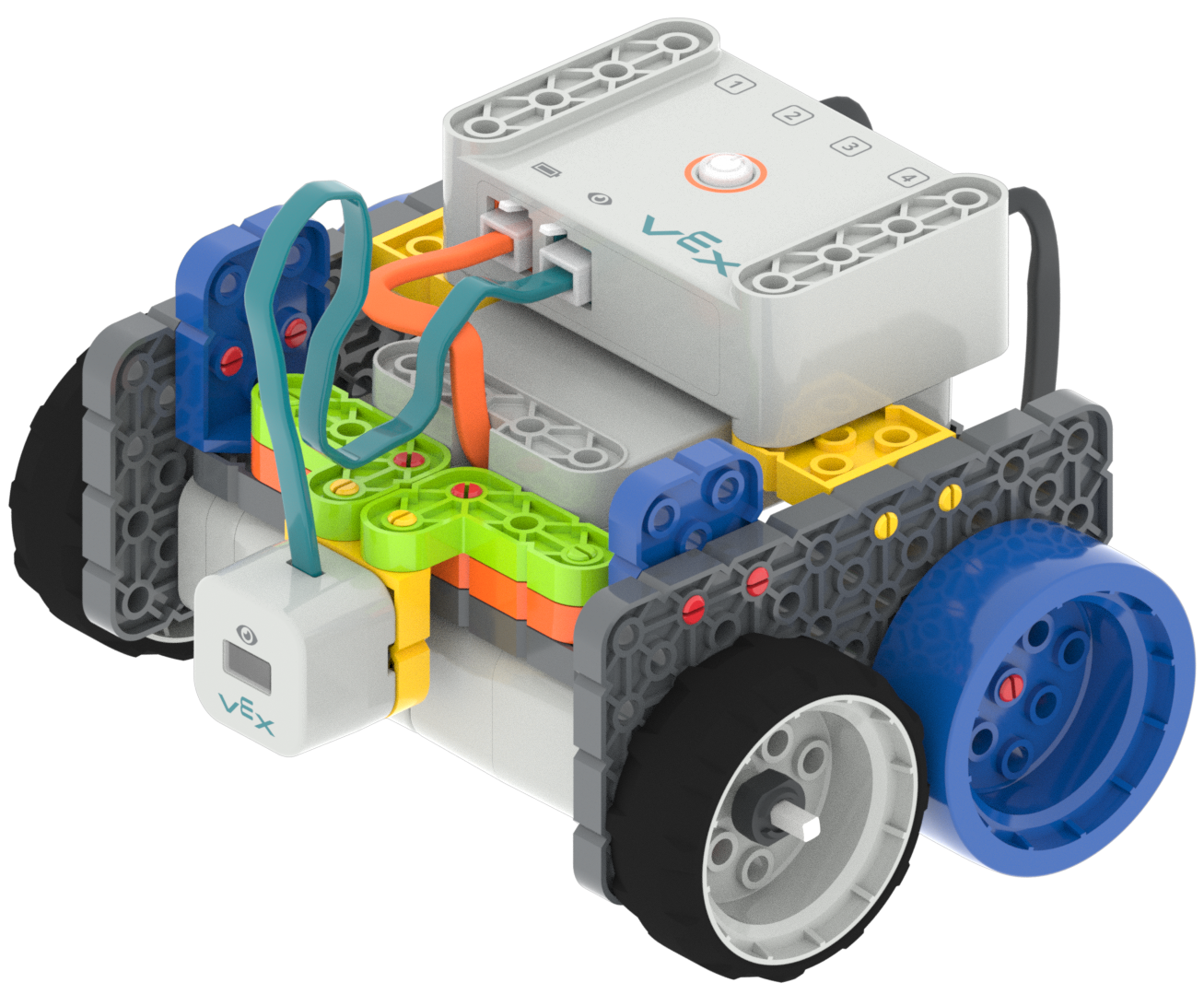
يستخدم مستشعر العين ضوء الأشعة تحت الحمراء لاكتشاف الأشياء. تعكس الأجسام ذات الألوان الفاتحة ضوء الأشعة تحت الحمراء ويتم اكتشاف بسهولة أكبر بواسطة مستشعر العين. تمتص الأجسام ذات الألوان الداكنة ضوء الأشعة تحت الحمراء ولا يكتشفها مستشعر العين أيضًا. أثناء الوحدة، استخدم ورقًا أبيض أو فاتح اللون لإزالة العوائق لضمان قدرة مستشعر العين على اكتشاف هذه الأشياء.
في هذه الوحدة، سيتم استخدام مستشعر العين للكشف عن وجود جسم ما في مسار قاعدة الكود. موضع مستشعر العين على قاعدة الكود يعني أنه لا يمكنه اكتشاف الأشياء الموجودة أمامه إلا مباشرة. ضع في اعتبارك ذلك عند وضع قاعدة التعليمات البرمجية الخاصة بك والعقبات مع طلابك حتى تعمل المواد على إعداد الطلاب لتحقيق النجاح.
لمزيد من المعلومات حول مستشعر العين وكيفية عمله، راجع مقالة مكتبة VEX Coding with VEX GO Eye Sensor VEX.
ما هو VEXcode GO؟
VEXcode GO هي بيئة برمجة تُستخدم للتواصل مع روبوتات VEX GO. يستخدم الطلاب واجهة السحب والإفلات لإنشاء مشاريع VEXcode GO التي تتحكم في تصرفات الروبوتات الخاصة بهم. يمكن تحديد غرض كل كتلة باستخدام إشارات مرئية مثل الشكل واللون والتسمية . لمزيد من المعلومات حول كيفية العمل مع VEXcode GO، راجع قسم VEXcode GO في مكتبة VEX.
تمثل الكتل الموجودة في VEXcode GO أوامر الروبوت المستخدمة لإنشاء مشروع في VEXcode GO. فيما يلي قائمة بالكتل الرئيسية المستخدمة خلال هذه الوحدة.
| كتل VEXcode GO | السلوكيات |
|---|---|
 |
تبدأ الكتلة {When started} في تشغيل مجموعة الكتل المرفقة عند بدء المشروع. |
![[محرك] كتلة](/stemlabs/sites/default/files/inline-images/IMG_3908B0BDE720-1.jpeg) |
تعمل كتلة [Drive] على تحريك مجموعة نقل الحركة للأمام أو للخلف إلى الأبد. |
![[التحول إلى] كتلة](/stemlabs/sites/default/files/inline-images/IMG_4C9CEBAFA9C0-1.jpeg) |
تعمل كتلة [Turn for] على تحويل نظام نقل الحركة لمسافة معينة. |
![[للأبد] كتلة](/stemlabs/sites/default/files/inline-images/IMG_81A9639F50BD-1.jpeg) |
تكرر الكتلة [للأبد] أي كتل موجودة داخل الحرف "C" إلى الأبد. |
![[انتظر] كتلة](/stemlabs/sites/default/files/inline-images/IMG_BA932FD0539C-1.jpeg) |
تنتظر الكتلة [الانتظار] فترة زمنية محددة قبل الانتقال إلى الكتلة التالية في المشروع. |
![[انتظر حتى] كتلة](/stemlabs/sites/default/files/inline-images/IMG_F0CE9176887D-1.jpeg) |
تنتظر الكتلة [انتظر حتى] الحالة الموجودة بداخلها للإبلاغ عن TRUE قبل الانتقال إلى الكتلة التالية. |
![كتلة [تم العثور على كائن]](/stemlabs/sites/default/files/inline-images/IMG_C6D52E895867-1.jpeg) |
تُبلغ الكتلة <Found object> إذا اكتشف مستشعر العين شيئًا ما. |
![[توقف عن القيادة] كتلة](/stemlabs/sites/default/files/inline-images/IMG_9BF4B55067B3-1.jpeg) |
تعمل كتلة [إيقاف القيادة] على إيقاف نظام نقل الحركة. |
![كتلة [ضبط لون المصد]](/stemlabs/sites/default/files/inline-images/IMG_DD0B68773B36-1.jpeg) |
تقوم كتلة [ضبط لون المصد] بتعيين لون مصد LED. |
كيف تعمل كتلة [الانتظار حتى] مع مستشعر العين؟
في هذه الوحدة، سيستخدم الطلاب مستشعر العين الموجود في قاعدة التعليمات البرمجية لاكتشاف العوائق في منطقة هبوط مركبة المريخ الجوالة. لتشفير ذلك، سيستخدمون كتلة [انتظر حتى] في المشروع. الكتلة [انتظر حتى] هي كتلة تحكم تقوم بالتحقق بشكل متكرر من الشرط للتحكم في تدفق المشروع. لن ينتقل المشروع إلى الكتلة التالية إلا إذا كانت الحالة في الكتلة [انتظر حتى] صحيحة. في هذه الوحدة، يتم استخدام الكتلة [انتظر حتى] مع الكتلة <Found object> كشرط - بحيث تنتظر حتى يكتشف مستشعر العين ويعترض، وتكون حالة الكتلة <Found object> صحيحة - للانتقال إلى المرحلة التالية كتلة في المشروع.
يمكن استخدام كتل [الانتظار حتى] جنبًا إلى جنب مع الكتل غير المنتظرة، مثل كتلة [القيادة] في هذه الوحدة، بحيث يمكن لقاعدة التعليمات البرمجية التحرك للأمام إلى حيث يكتشف مستشعر العين أي كائن.
لرؤية تدفق المشروع في الوقت الفعلي أثناء تشغيل الروبوت الخاص بك، شاهد ميزة Highlight في VEXcode GO. في بداية المشروع، سيظهر التمييز الأخضر حول الكتلة [انتظر حتى] حتى يصبح الشرط صحيحًا. سيظهر التمييز الأخضر لتخطي الكتل غير المنتظرة (في هذه الحالة كتلة [Drive]) لأن هذه الأوامر يتم تنفيذها بسرعة.
في هذه الوحدة، سيستخدم الطلاب مجموعة من الكتل المنتظرة، مثل كتلة [الانتظار حتى]، والكتل غير المنتظرة، مثل كتلة [القيادة]، في مشاريعهم لإكمال أنشطة المختبر وتحدياته. لمعرفة المزيد حول كتل الانتظار وعدم الانتظار في VEXcode GO، اقرأ مقالة مكتبة VEX هذه.
التحضير للتحدي المفتوح في هذه الوحدة
في هذه الوحدة، سيُطلب من الطلاب استخدام ما تعلموه سابقًا لإنشاء مشروع لحل التحدي. نظرًا لأهمية تحدي الطلاب بانتظام لحل المشكلات وتطبيق المهارات التي تعلموها بطريقة جديدة، فإننا نشجعك على تحدي طلابك واستخدام هذه الاستراتيجيات لبناء المرونة و المساعدة في توجيههم خلال المراحل. تحدي. فيما يلي بعض الاقتراحات لمساعدة الطلاب أثناء تجربة مشاريعهم:
قدم ملاحظات دون تقديم الحل - ارتكاب الأخطاء أثناء العمل خلال التحدي أمر متوقع ومشجع. "الأخطاء في التعلم يمكن أن تخلق الفرص، [و] يمكن أن تساعد في تحقيق الروابط."1 إن إنشاء عملية مألوفة لحل المشكلات مع طلابك يمكن أن يساعدهم على تعلم كيفية تحديد المشكلة والمضي قدمًا عندما يرتكبون خطأً، وبالتالي تقليل الاضطراب والإحباط. حاول استخدام دورة حل المشكلات التالية مع طلابك لمساعدتهم على استكشاف أخطاء مشاريعهم وإصلاحها والتوصل إلى حلول خاصة بهم.
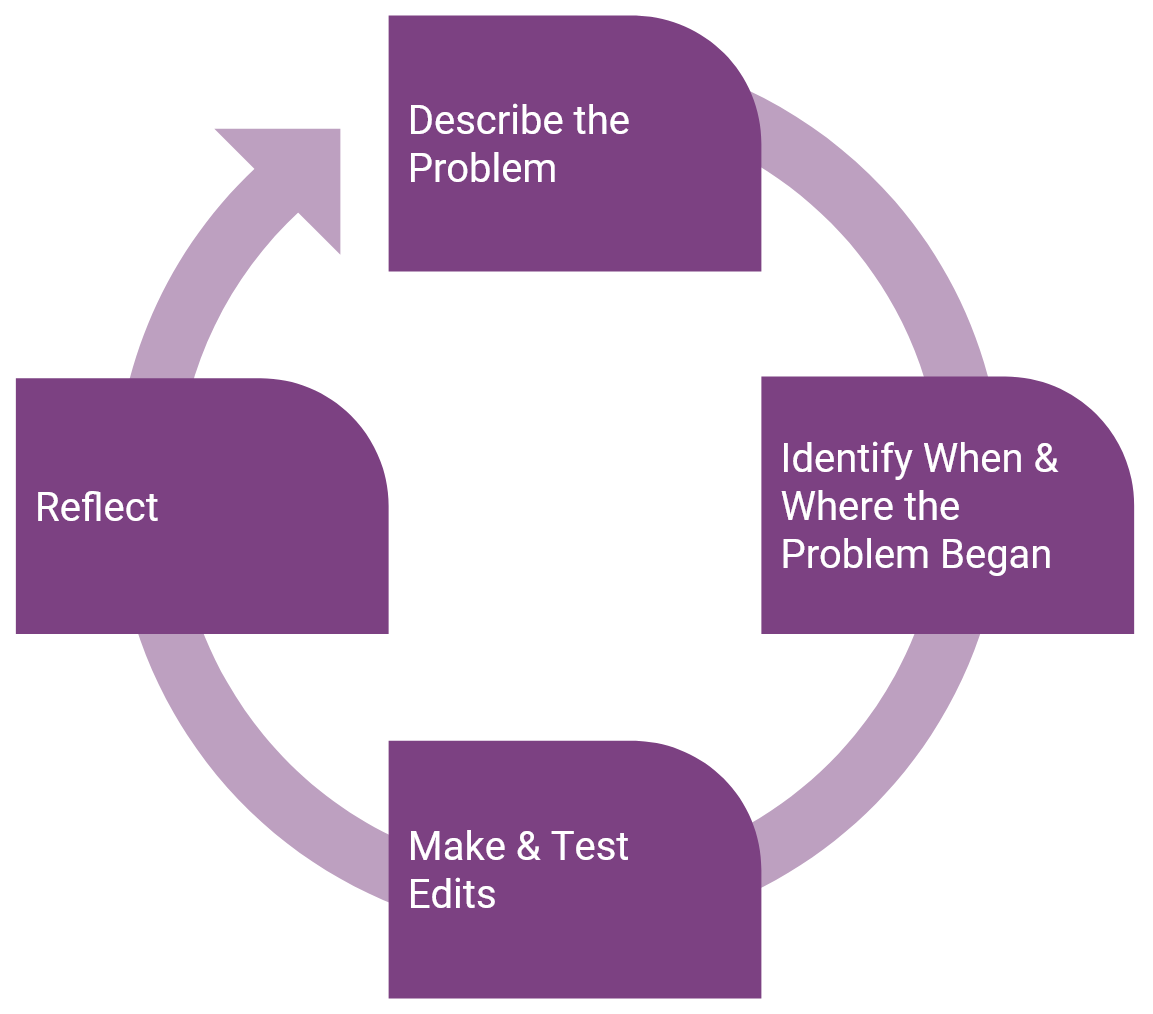
- وصف المشكلة
- اطلب من الطالب أن يشرح ما هو الخطأ. يجب أن يكون الطلاب قادرين على ربط الخطأ بالهدف المشترك أو التحدي المطروح.
- كيف تتحرك Code Base في مشروعهم؟ ينبغي أن يتحرك؟
- اطلب من الطالب أن يشرح ما هو الخطأ. يجب أن يكون الطلاب قادرين على ربط الخطأ بالهدف المشترك أو التحدي المطروح.
- تحديد متى وأين بدأت المشكلة
- اسأل الطالب عندما لاحظ المشكلة لأول مرة.
- ما هو الجزء من المشروع الذي تم تنفيذه؟
- إذا كان الطلاب يواجهون صعوبة في تحديد مكان الخطأ في المشروع، فشجعهم على استخدام ميزة Project Stepping في VEXcode GO. يمكن استخدام الإشارات المرئية المقدمة مع ميزة خطوات المشروع لمساعدة الطلاب على استكشاف أخطاء مشروعهم وإصلاحها من خلال القدرة على رؤية الكتل التي يتم تنفيذها واحدة تلو الأخرى. هذا إلى رؤية أفضل للكتل التي قد تسبب الخطأ، لذلك يمكن أن يصبح تصحيح الأخطاء عملية أكثر استهدافًا وفعالية. لمزيد من المعلومات حول كيفية استخدام ميزة "خطوات المشروع"، راجع مقالة "الخطوات عبر مشروع في VEXcode GO VEX Library".
- اسأل الطالب عندما لاحظ المشكلة لأول مرة.
- قم بإجراء & تعديلات اختبارية
- عندما يجد الطلاب خطأً، يجب إجراء تعديلات على مشروعهم. يمكن للطلاب اختبار المشروع مع كل تعديل يتم إجراؤه. إذا نجح المشروع، فيمكنهم الانتقال إلى الخطوة التالية في دورة حل المشكلات. إذا لم ينجح المشروع، فيمكنهم العودة إلى بداية العملية والمحاولة مرة أخرى.
- يعكس
- اطلب من الطلاب أن يفكروا في الخطأ الذي ارتكبوه وتغلبوا عليه أثناء العملية.
- ما هو الخطأ؟ ماذا تعلمت من هذا الخطأ؟ كيف يمكن أن تساعدك عند ترميز Code Base في المرة القادمة؟
- شجع الطلاب على التعرف على أخطائهم وما تعلموه من هذه العملية للمساعدة في تشجيع عقلية النمو. إن التركيز القوي على عقلية النمو يمكن أن يساعد الطلاب على تعلم متى وكيف يستمرون وكذلك متى يطلبون المساعدة.2 إذا كان بإمكان الطلاب رؤية عمليتهم كمقدمة لتعلم جديد، فيمكنهم استخدام الخطوات الواردة هنا لتعزيز تعلمهم بالإضافة إلى تعزيز تعلم زملائهم في الفصل. عندما يواجه الطلاب هذه المشكلات ويفكرون في أخطائهم، شجعهم على مشاركة أخطائهم ومعالجتها مع زملائهم الطلاب. وبهذه الطريقة، يمكن للطلاب أن يصبحوا "مصادر تعلم لبعضهم البعض".3
- اطلب من الطلاب أن يفكروا في الخطأ الذي ارتكبوه وتغلبوا عليه أثناء العملية.
تم تصميم مسح منطقة الهبوط (المختبر 2) ليكون بمثابة استكشاف مفتوح سيطلب من طلابك المثابرة لحل التحدي. في هذا التمرين المعملي، نقدم حلقات مع الكتلة [Forever] ونطلب من الطلاب تجربة استخدام الحلقات في مشروعهم لجعل Code Base يقود ويكتشف جميع العوائق في منطقة الهبوط (GO Field). إذا كان استخدام الحلقات في المشروع جديدًا بالنسبة لطلابك، فقد يستغرق الأمر عدة تكرارات لمشاريعهم لاستخدام الحلقات بشكل فعال. استخدم الاقتراحات الموضحة في هذا القسم لإعداد الطلاب التجربة والخطأ، ولمساعدتهم على استكشاف مشروعاتهم وإصلاحها لتحقيق هدف التحدي. يحتوي قسم التيسير في الجزء 1 و من اللعب على وسائل دعم تعليمية إضافية لتوجيه الطلاب خلال تحدي المعمل 2. إن وجود خطة لكيفية تقديم الدعم لحل المشكلات والتجربة والخطأ المطلوب في هذا المختبر يمكن أن يساعدك على تلبية الاحتياجات الفردية لطلابك.
راجع مقالة بناء المرونة في STEM Labs VEX Library المادة لمزيد من المعلومات حول كيف يمكن للملاحظات الفعالة أن تساعد الطلاب على بناء المرونة وعقلية النمو أثناء العمل من خلال مختبرات STEM.
1 هاتي وجون وشيرلي كلارك. التعلم المرئي: ردود الفعل. روتليدج، تايلور & فرانسيس جروب، 2019.
2 المرجع نفسه.
3 المرجع نفسه، ص. 121