
Matematická podpora
Při výuce cvičení 4 a 5 se zapojují další matematické pojmy a výpočty. Tato stránka nabízí učitelům relevantní podkladové materiály na podporu matematiky, kterou studenti v těchto laboratořích zkoumají.
Matematika řízení
Pro dokončení přehlídky v laboratoři 4 studenti pojedou se svým vozem Code Base po rovné trase přehlídky. Místo použití bloků hnacího ústrojí, které pohybují oběma koly současně, studenti použijí bloky [Spin for] ve VEXcode GO, jak je zde znázorněno, k roztočení motorů připojených ke kolům a pohybu robota vpřed. Bloky [Spin for] akceptují jako parametry „otáčky“ nebo „stupně“. V laboratoři 4 studenti vypočítají počet otáček, které je třeba do tohoto projektu zadat, aby jejich robot urazil vzdálenost trasy průvodu.
Podívejte se na video níže a dozvíte se, jak vypočítat počet otáček kola potřebných k tomu, aby robot urazil stanovenou vzdálenost rovně.
Užitečné reference:
Terminologie a hodnoty pro šedá kola:
| Pojem | Definice | Vizuální | Vzorec | Hodnota |
|---|---|---|---|---|
| Průměr | Měření přímky přes střed kruhu | 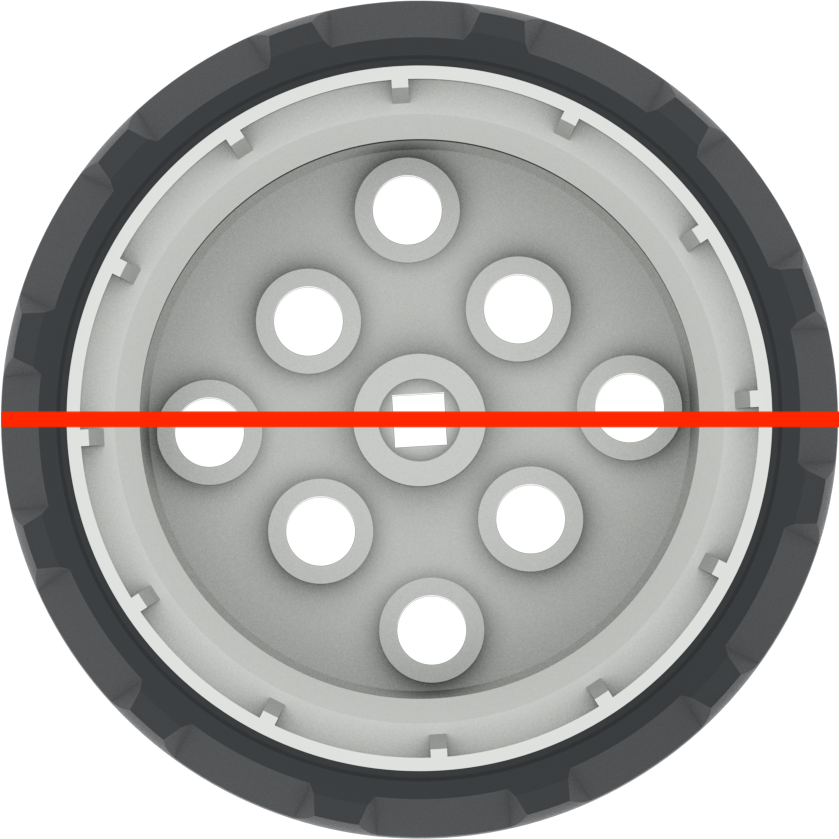 |
d = 2 r | ~ 50,93 mm nebo 2 palce |
| Obvod | Celková vzdálenost kolem vnější strany kruhu |  |
C = π d | ~ 160 mm nebo 6,25 palce |
Přesné měření
Když studenti měří, ujistěte se, že je vedete k opatrnému a přesnému měření. Můžete použíttisknutelné pravítko VEX GOpro měření studenty nebo pravítka ve třídě.
- Připomeňte studentům, aby začali měřit od nulového bodu na pravítku a věnovali velkou pozornost koncovému bodu objektu, který měří. Zahájení nebo ukončení jejich měření nepřesně ovlivní jejich výpočty a případný pohyb jejich robota.
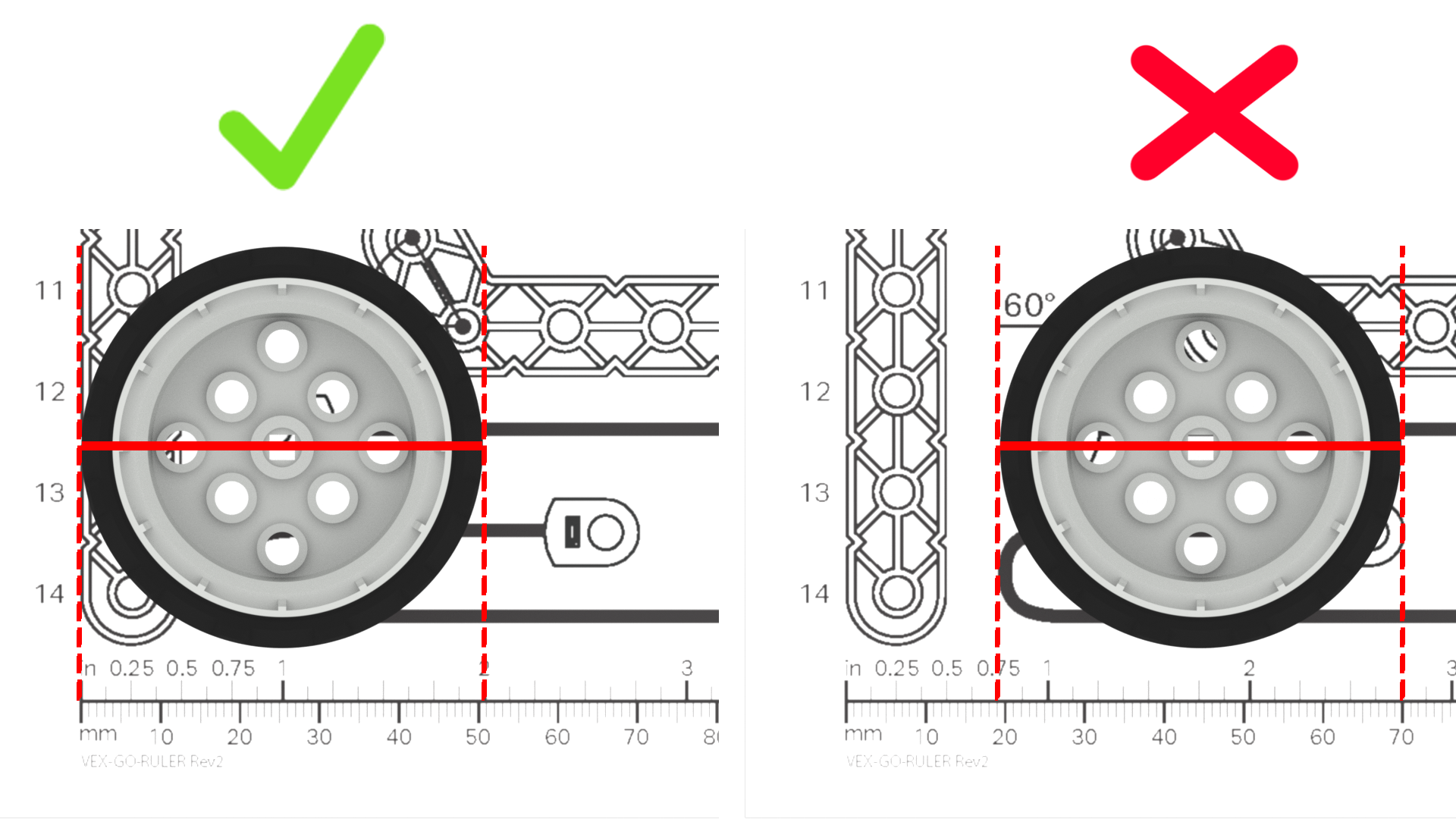
- Ujistěte se, že studenti vědí, jak číst značky na pravítku, které používají, aby mohli přesně měřit. Pokud mají pravítka, která používáte, jak imperiální, tak metrické jednotky (jako je pravítko VEX GO Printable Ruler), ujistěte se, že studenti konzistentně používají stejné měrné jednotky.
 Pravítko pro tisk
Pravítko pro tisk - Studenti mohou zaokrouhlit své míry na nejbližší jednotku, nebo zlomek jednotky. Zaokrouhlování může v případě potřeby zjednodušit výpočty, ale také může snížit přesnost měření. Můžete například instruovat studenty, aby zaokrouhlili nahoru na nejbližší půl palce nebo centimetr, ale jejich robot se posune o něco dále, než bylo původně zamýšleno. Případně můžete nechat studenty změřit s přesností na centimetr nebo milimetr a zjistit, že jejich roboti cestují blíže k zamýšlené vzdálenosti.
- Pokud studenti potřebují další praxi s měřením, můžete použít Cvičení Měření aktivity VEX GO s jednotlivými studenty nebo skupinami, nebo jako celou aktivitu ve třídě.
Matematika otáčení o 360°
Pro dokončení průvodu v laboratoři 5 budou studenti řídit svůj plovák Code Base po trase průvodu s otočkou.
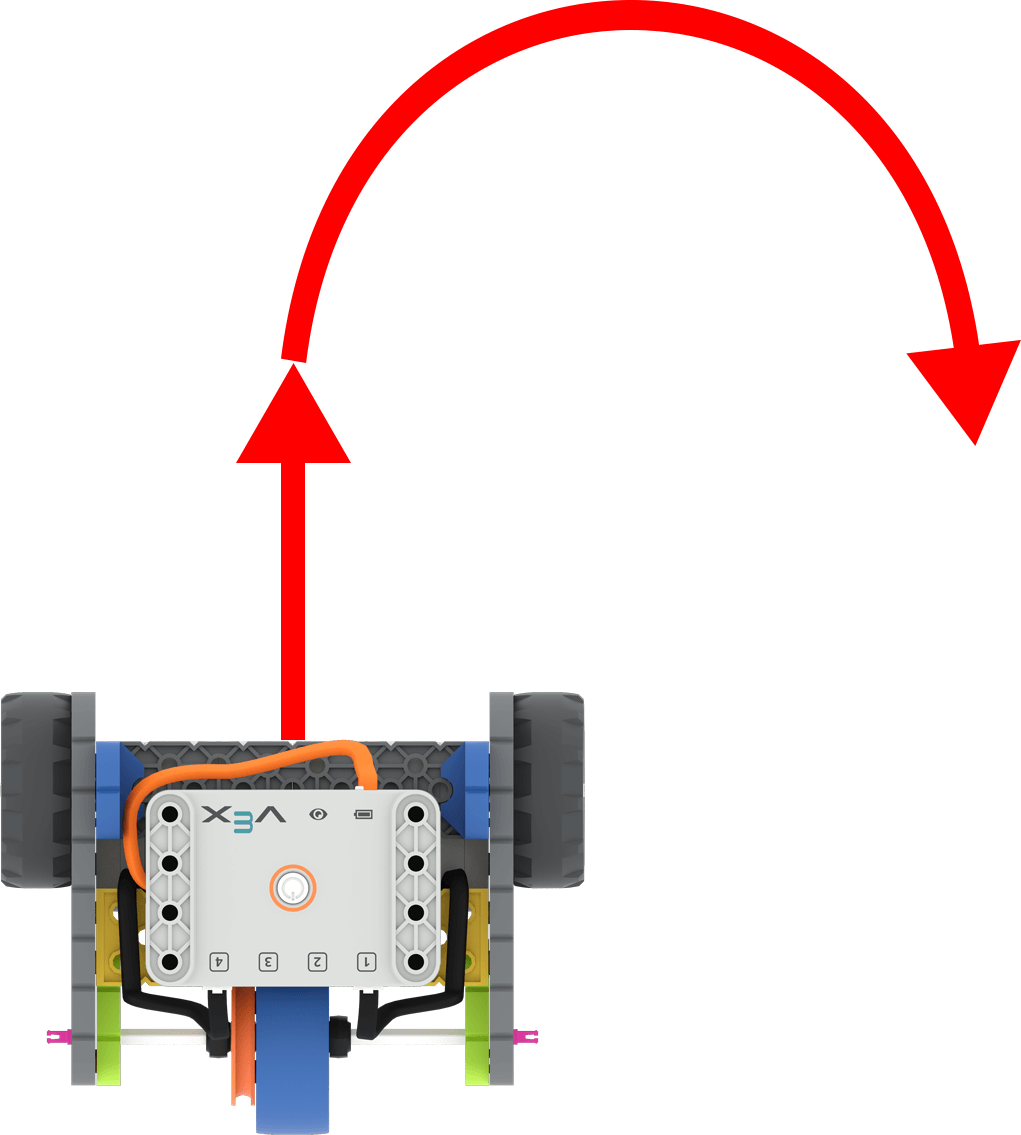
Kódová základna se šipkami, které ukazují jízdu dopředu a pak odbočení doprava
Studenti budou stavět na tom, co se naučili o kódování robota, aby cestoval na přímou vzdálenost, aby kódoval robota, aby jel na nelineární vzdálenost, nebo na zatáčku. Studenti stále počítají počet otáček potřebných k ujetí nastavené vzdálenosti, takže použijí stejný vzorec jako v předchozí laboratoři.
Podívejte se na video níže, kde se dozvíte, jak vypočítat počet otočení kola potřebný k otočení robota o 360° se svými studenty.
Užitečné reference:
Když se kódová základna otočí, hnací kola se pohybují v opačných směrech, aby se robot otočil. Chcete-li například otočit robota doprava, levé kolo pojede dopředu, zatímco pravé kolo pojede dozadu.
Terminologie a hodnoty pro Code Base:
| Pojem | Definice | Vizuální | Vzorec | Hodnota |
|---|---|---|---|---|
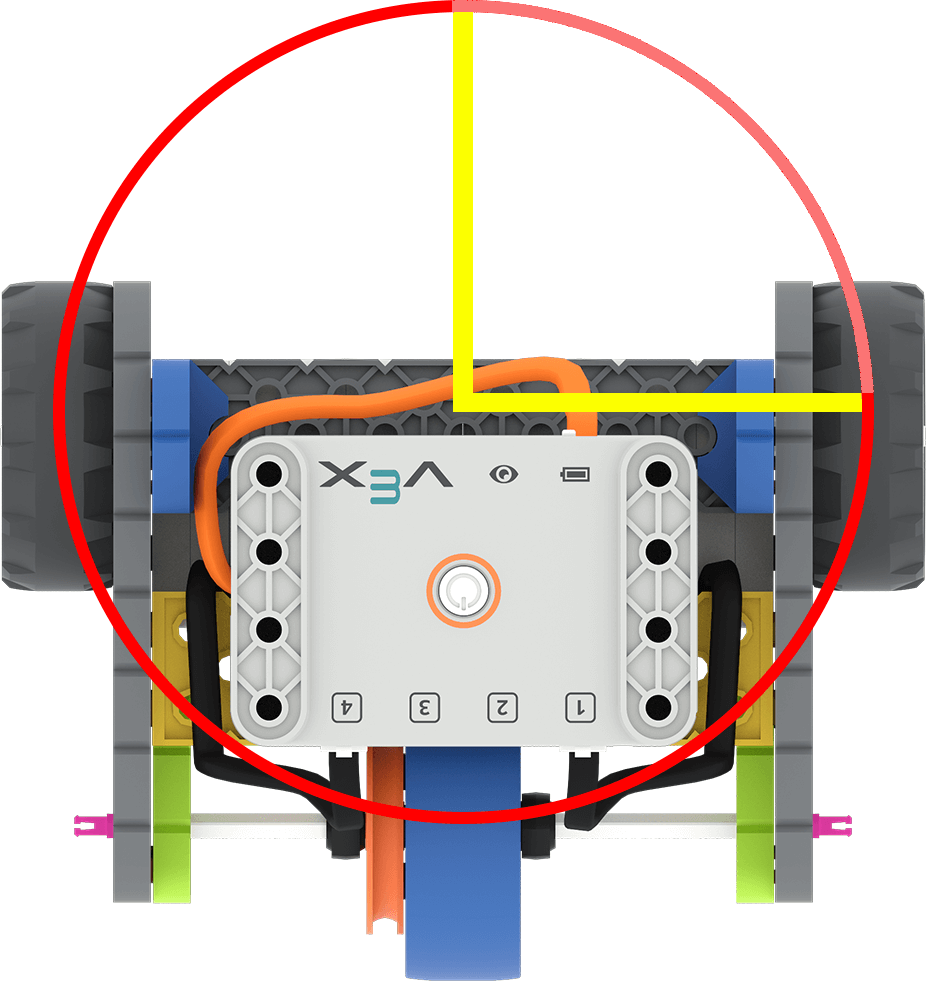
| Průměr | Měření přímky od středu každého kola (známé také jako rozvor) | 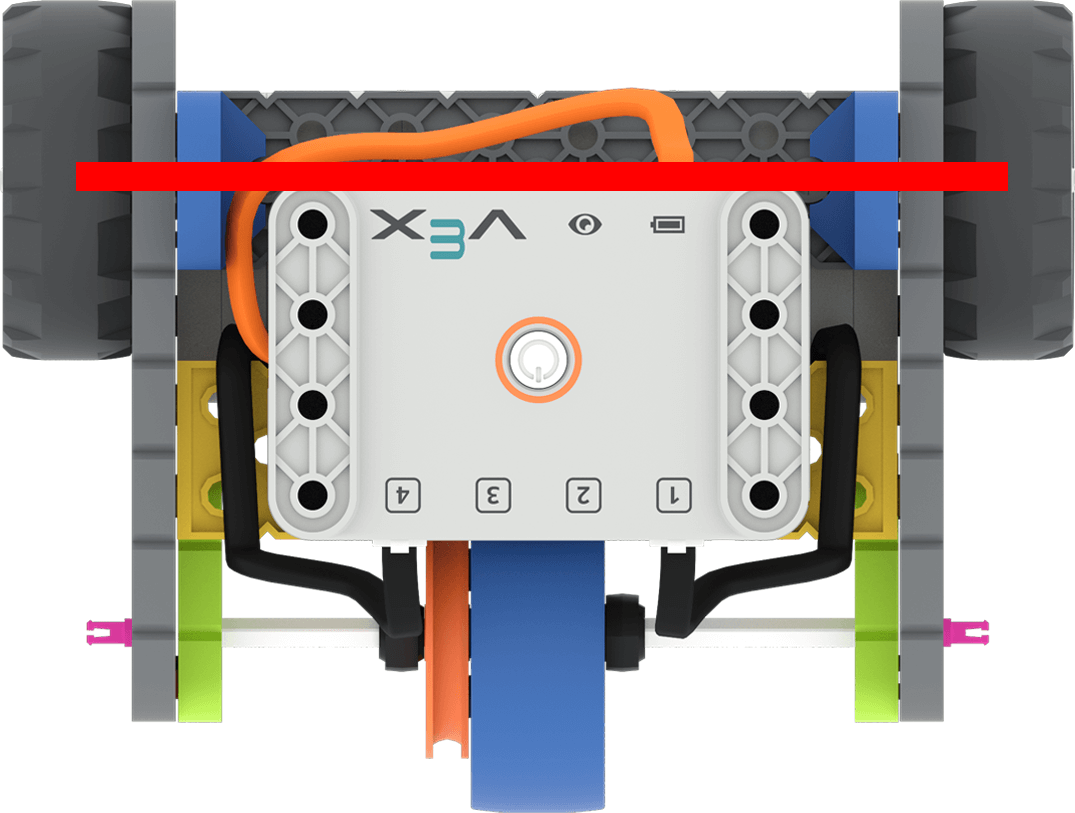 |
d = 2 r | ~ 135 mm nebo 5,3 palce |
| Obvod | Celková vzdálenost ujetá koly za účelem dokončení 360° | 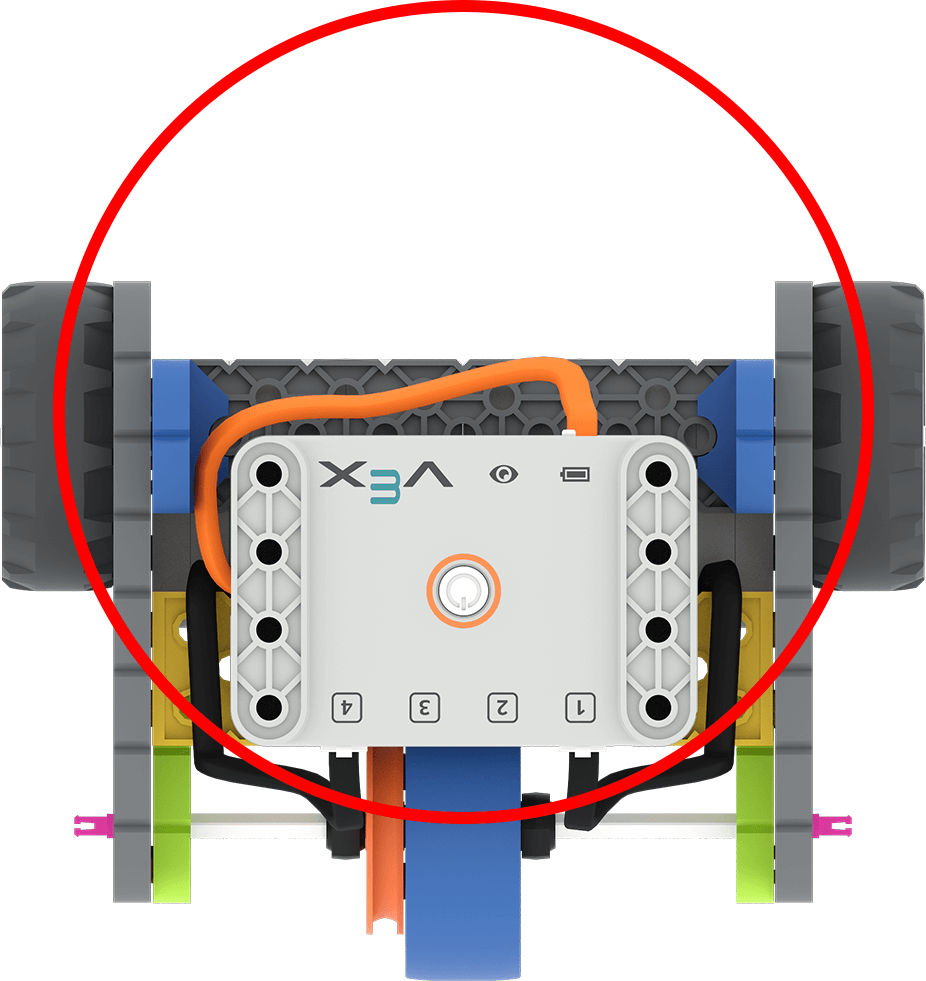 |
C = π d | ~ 424 mm nebo 16,7 palce |
Matematika soustružení jakéhokoliv stupně
V tomto videu se dozvíte více o výpočtu počtu otáček kola potřebných k tomu, aby se robot mohl otočit o libovolný stupeň.
Převod na stupně
Blok [Spin for] bude přijímat otáčky nebo stupně jako parametry. Chcete-li použít stupně, jednoduše vynásobte počet otáček 360. Tento příklad ukazuje, o kolik stupňů se motory otočí, aby se robot otočil o celých°. Všimněte si, že v tomto projektu se motory otáčejí v opačných směrech a k prvnímu bloku je přidán blok „a nečekejte“, takže se motory otáčejí současně. Tím se robot otočí doprava o požadovaných 360°. 
Běžné mylné představy
Existuje několik mylných představ, které mohou mít studenti o měření a matematice řízení a zatáčení. Toto jsou některé z nejběžnějších a také návrhy, jak je se studenty řešit.
| Situace | Mylná představa | Navrhovaná oprava |
|---|---|---|
|
Učitel se ptá třídy, co bychom měli zadat do bloku [Spin for], aby se robot otočil o 90°? Student odpoví „90“. |
Vzdálenost ve stupních, kterou kolo jede, aby se otočilo, se rovná úhlu otočení. Studenti nepoužívají obvod otáčení robota k výpočtu vzdálenosti ve stupních, kterou musí kolo ujet. |
Připomeňte studentům, že kola musí jezdit po obvodu otáčení, aby se robot mohl otáčet. (Na tomto obrázku je to podél červeného kruhu od jedné žluté čáry k druhé.)
Otočte samotné kolo o pouhých 90°, abyste studentům pomohli vizualizovat, jak daleko se kolo otáčí, aby ujelo danou vzdálenost. |
|
Učitel se ptá třídy, co bychom měli zadat do bloku [Spin for], aby robot jel 12 palců dopředu? Student odpoví „12“. |
Počet otáček kol se rovná požadované ujeté vzdálenosti. Student nepoužívá obvod kola pro výpočet počtu otáček kola pro ujetí požadované vzdálenosti. |
Připomeňte studentům, jak daleko se robot pohybuje s 1 otočením kola, a zeptejte se, zda 12 vypadá jako příliš mnoho nebo příliš málo úplných zatáček na to, aby ujel 12 palců. Chcete-li studentům pomoci lépe si to představit, otáčejte kolečkem po pravítku po dobu 12 otáček, abyste studentům ukázali, jak daleko je tato vzdálenost.
Připomeňte studentům, že 1 otočení kola je obvod kola a že 12 palců musí být děleno tímto obvodem. |
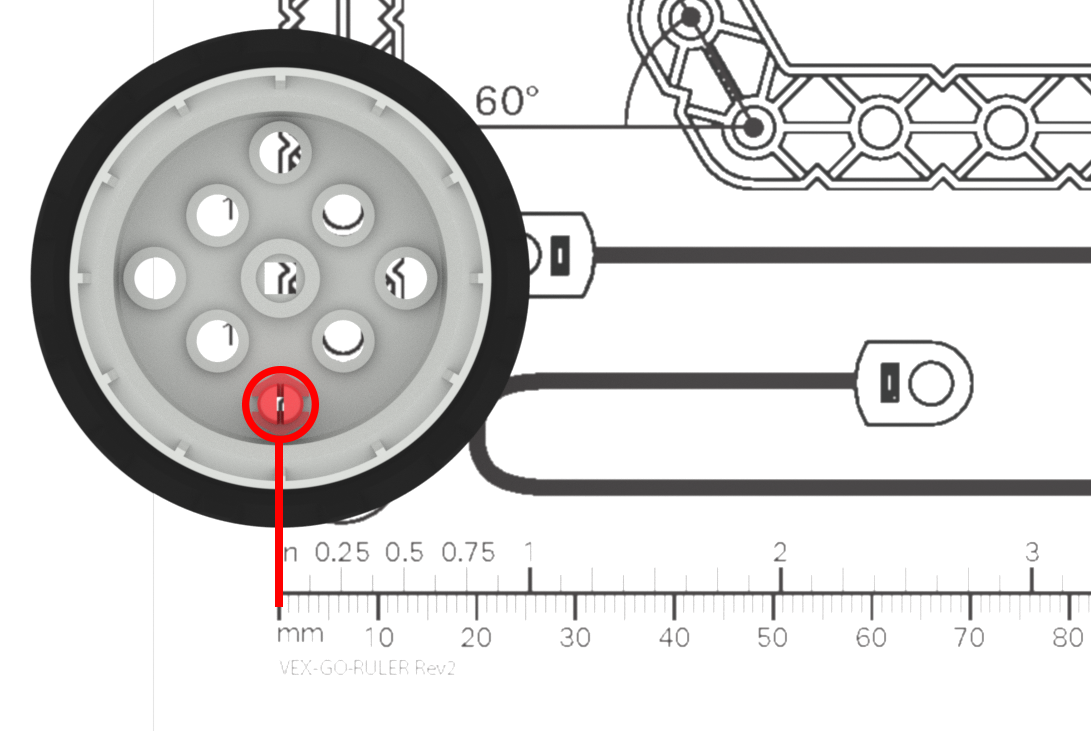
| Student měří kolečko, ale žádná hrana kolečka není na nulové značce pravítka. |
Pravítko začíná na 1, ne na nule. Student nepoužívá pravítko správně, aby získal přesné měření. |
Připomeňte studentům, že pravítko začíná u značky „0“, a že pokud od tohoto bodu nebudou měřit, budou jejich měření nesprávná. Možná budete chtít označit začátek pravítka páskou nebo barevným fixem jako další vizuální pomůcku pro studenty při práci. (Pro další praxi s měřením mohou studenti absolvovat aktivitu měření praxe.) |
|
Student říká, že jeho projekt nefunguje. Učitel si všimne, že správný počet otáček kola je v bloku [Spin for], ale parametr je nastaven na „stupně“. |
Jednotky nebo parametry jsou zaměnitelné. Studenti se ve svém projektu nevěnují parametrům/měrným jednotkám. |
Zeptejte se studentů, jakou měrnou jednotku používají a zda odpovídá parametru v bloku.
|
| Student se pokusí zadat „21/4“ do parametru bloku [Spin for] pro zadání „2 ¼ otáček“. |
Zlomky a desetinná místa se zapisují stejným způsobem. Student nepřevádí zlomek na desetinné číslo. |
Připomeňte studentům, že musí převést zlomky na desetinná místa, aby byly rozpoznatelné parametry. Chcete-li to provést, vydělte čitatele jmenovatelem. 2 ¼=94 =2,25 Můžete nechat studenty, aby si vytvořili vlastní zdroj a sestavili tabulku často používaných zlomkových čísel a jejich desetinných ekvivalentů. |
|
Učitel požádá studenty, aby se podělili o výpočet obvodu kola. Odpovědi studentů |
Obvod se vypočítá pomocí poloměru -πxpoloměru. Student používá ve výpočtu nesprávné měření. |
Připomeňte studentům, že obvod kola jeπ x průměr; a průměr je přímka procházející středem kola (nebo dvojnásobek poloměru).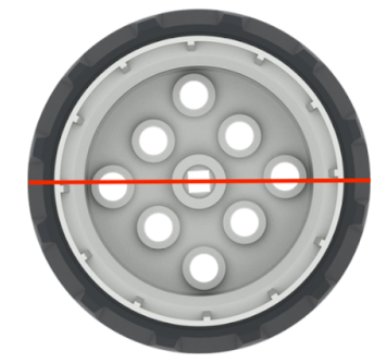 Pokud má mnoho studentů potíže s používáním vzorců, můžete měření a výpočet hodnoty zahrnout do celé třídní aktivity. |
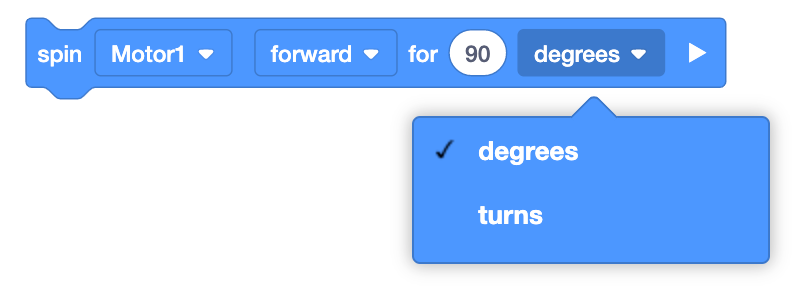 Připomeňte studentům, že jejich výpočty budou fungovat tak, jak bylo zamýšleno, pouze pokud je parametr nastaven na správnou jednotku. Otáčky a stupně nemají stejnou hodnotu.
Připomeňte studentům, že jejich výpočty budou fungovat tak, jak bylo zamýšleno, pouze pokud je parametr nastaven na správnou jednotku. Otáčky a stupně nemají stejnou hodnotu.
Příklad řešení
Řešení příkladu laboratoře 4
*Poznámka: Příkaz „a nečekej“ se v příkladovém projektu používá s prvním blokem, aby se oba bloky spustily současně. Bez „a nečekejte“ by se první motor roztočil, pak druhý a kódová základna by nejezdila podle plánu. Ujistěte se, že studenti "nesbalí" a nečekejte ", nebo jejich projekt nebude probíhat tak, jak bylo zamýšleno.

Chcete-li řídit 48palcovou (~122 cm) délku trasy přehlídky, bude muset Code Base cestovat ~7,68 otáčky. Výpočet je zobrazen vlevo a příklad řešení VEXcode GO vpravo.


Řešení příkladu laboratoře 5
Chcete-li řídit 48palcovou (~122 cm) délku trasy průvodu a otočit se o 180 stupňů, bude muset Code Base cestovat dopředu po dobu ~7,68 otáček, poté otočit jeden motor dopředu a druhý dozadu po dobu ~ 1,47 otáček. Výpočet je zobrazen vedle příkladu řešení VEXcode GO vpravo.


Poznámka: Chcete-li místo otáček použít stupně, vynásobte výpočty otáček číslem 360.
Prodloužení trasy průvodu
Pokud studenti potřebují další výzvu, můžete trasu průvodu rozšířit mnoha různými způsoby. To je jeden příklad, s možným řešením.
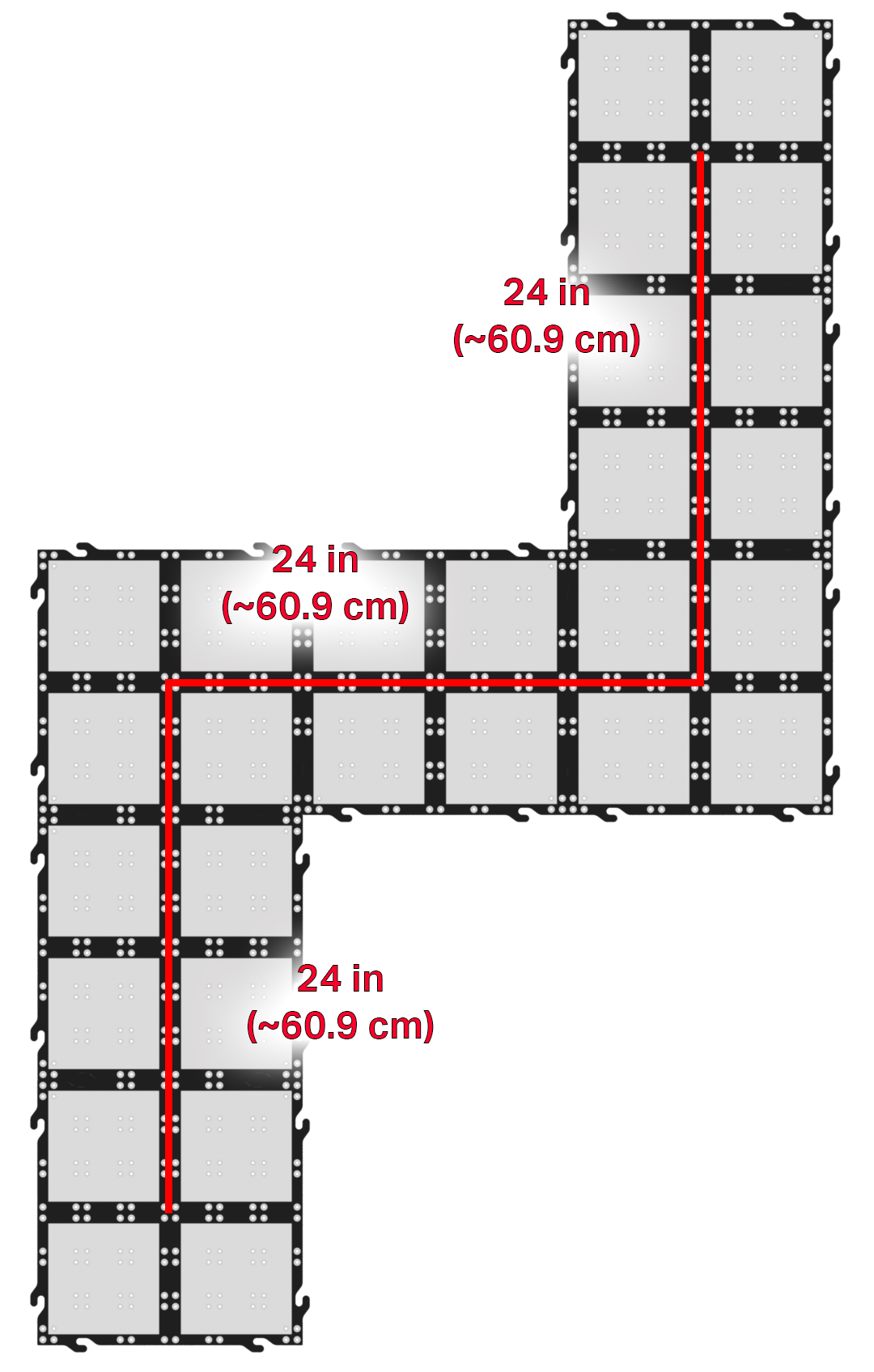
V tomto příkladu jsou jízdní vzdálenosti a zatáčky od laboratoří poloviční. V této trase však záleží na směru zatáček. Kromě přepočítávání budou muset studenti zjistit směr otáčení kol, aby se otočila požadovaným směrem.
Poloviční výpočty z předchozích cvičení jsou následující:
Ujetá vzdálenost = ~ 3,84 otáček
Vzdálenost otáčení = ~ 0,73 otáček
Tyto hodnoty jsou použity v následujícím příkladu řešení VEXcode GO:
