
دعم الرياضيات
عند تدريس المختبرين 4 و5، يتم تضمين مفاهيم وحسابات رياضية إضافية. توفر هذه الصفحة للمعلمين الموارد الخلفية ذات الصلة لدعم الرياضيات التي يستكشفها الطلاب في هذه المختبرات.
رياضيات القيادة
لإكمال العرض في المختبر 4، سوف يقود الطلاب عوامة قاعدة التعليمات البرمجية الخاصة بهم على طول مسافة العرض
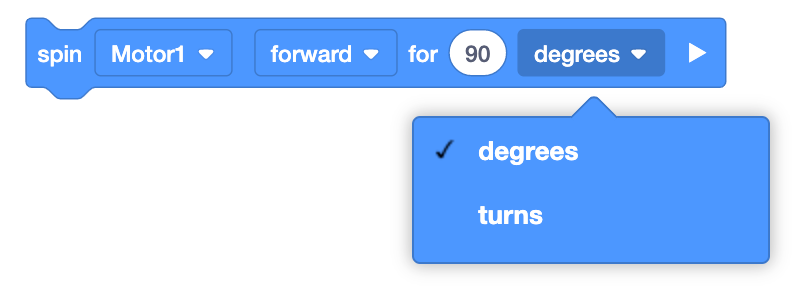
المستقيمة. بدلاً من استخدام كتل نقل الحركة التي تحرك كلتا العجلتين في نفس الوقت، سيستخدم الطلاب كتل [Spin
for] في VEXcode GO، كما هو موضح هنا، لتدوير المحركات المتصلة بالعجلات وتحريك الروبوت إلى الأمام. تقبل كتل
[الدوران] "الدوران" أو "الدرجات" كمعلمات. في المختبر 4، سيقوم الطلاب بحساب عدد الدورات التي سيتم إدخالها في
هذا المشروع لقيادة الروبوت الخاص بهم على مسافة مسار العرض.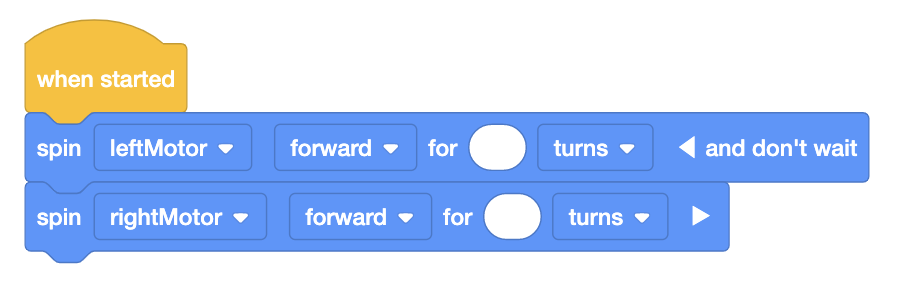
شاهد الفيديو أدناه لمعرفة كيفية حساب عدد دورات العجلة اللازمة لتحريك الروبوت الخاص بك بشكل مستقيم لمسافة محددة.
مراجع مفيدة:
المصطلحات والقيم الخاصة بالعجلات الرمادية:
| شرط | تعريف | مرئي | صيغة | قيمة |
|---|---|---|---|---|
| القطر | قياس خط مستقيم عبر مركز الدائرة | 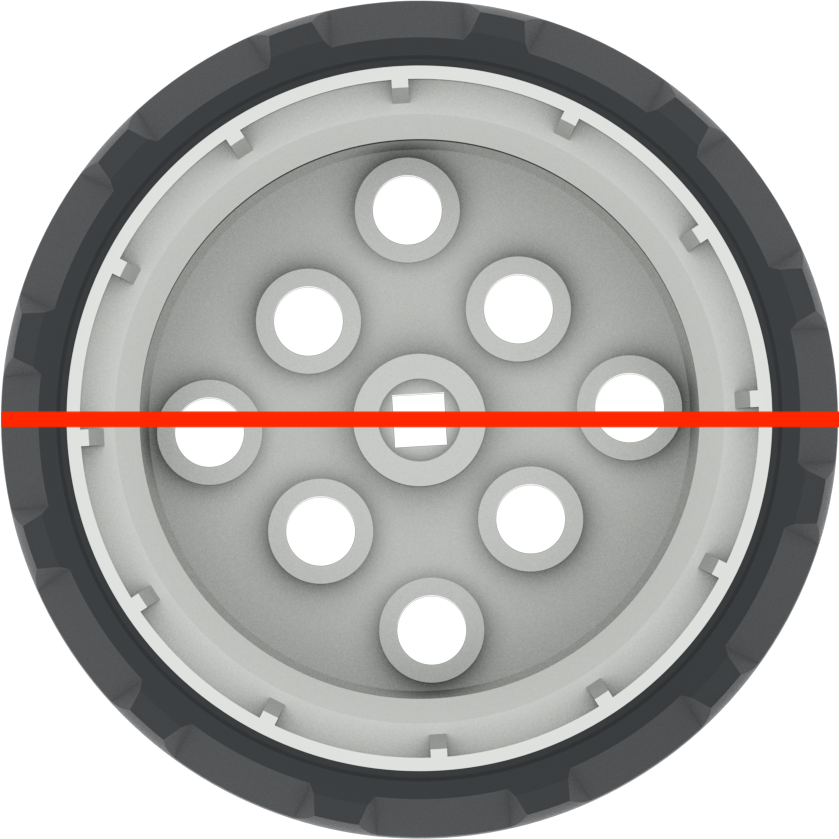 |
د = 2 ر | ~ 50.93 ملم أو 2 بوصة |
| محيط | المسافة الإجمالية حول الجزء الخارجي من الدائرة |  |
ج = ط د | ~ 160 ملم أو 6.25 بوصة |
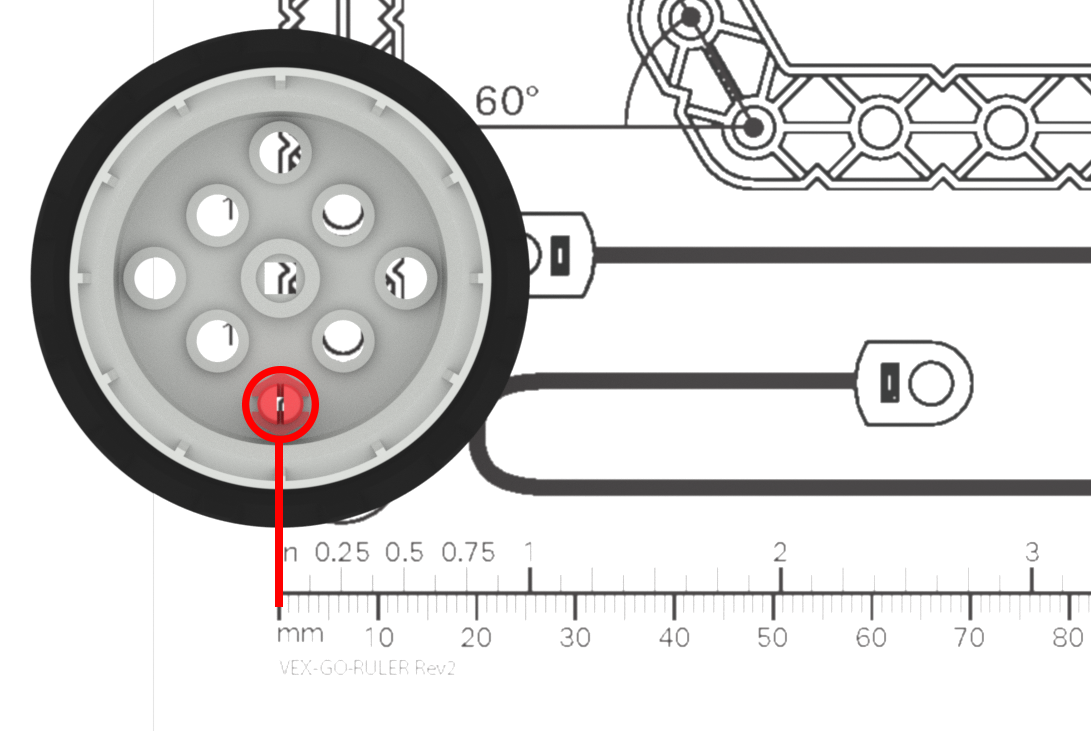
القياس بدقة
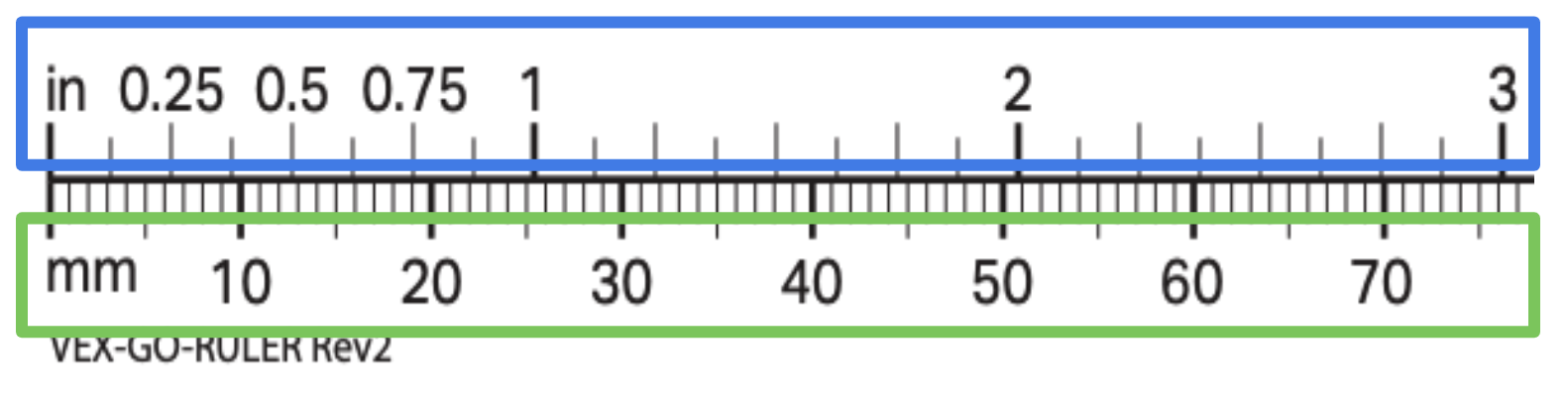
عندما يقوم الطلاب بالقياس، تأكد من توجيههم إلى القياس بعناية ودقة. يمكنك استخدام مسطرة VEX GO القابلة للطباعةليتمكن الطلاب من قياسها، أو مساطر الفصل الدراسي.
- ذكّر الطلاب ببدء القياس من نقطة الصفر على المسطرة، والانتباه جيدًا إلى نقطة نهاية الجسم الذي يقيسونه. إن بدء أو إنهاء قياساتهم بشكل غير دقيق سيؤثر على حساباتهم، وعلى الحركة النهائية لروبوتهم.
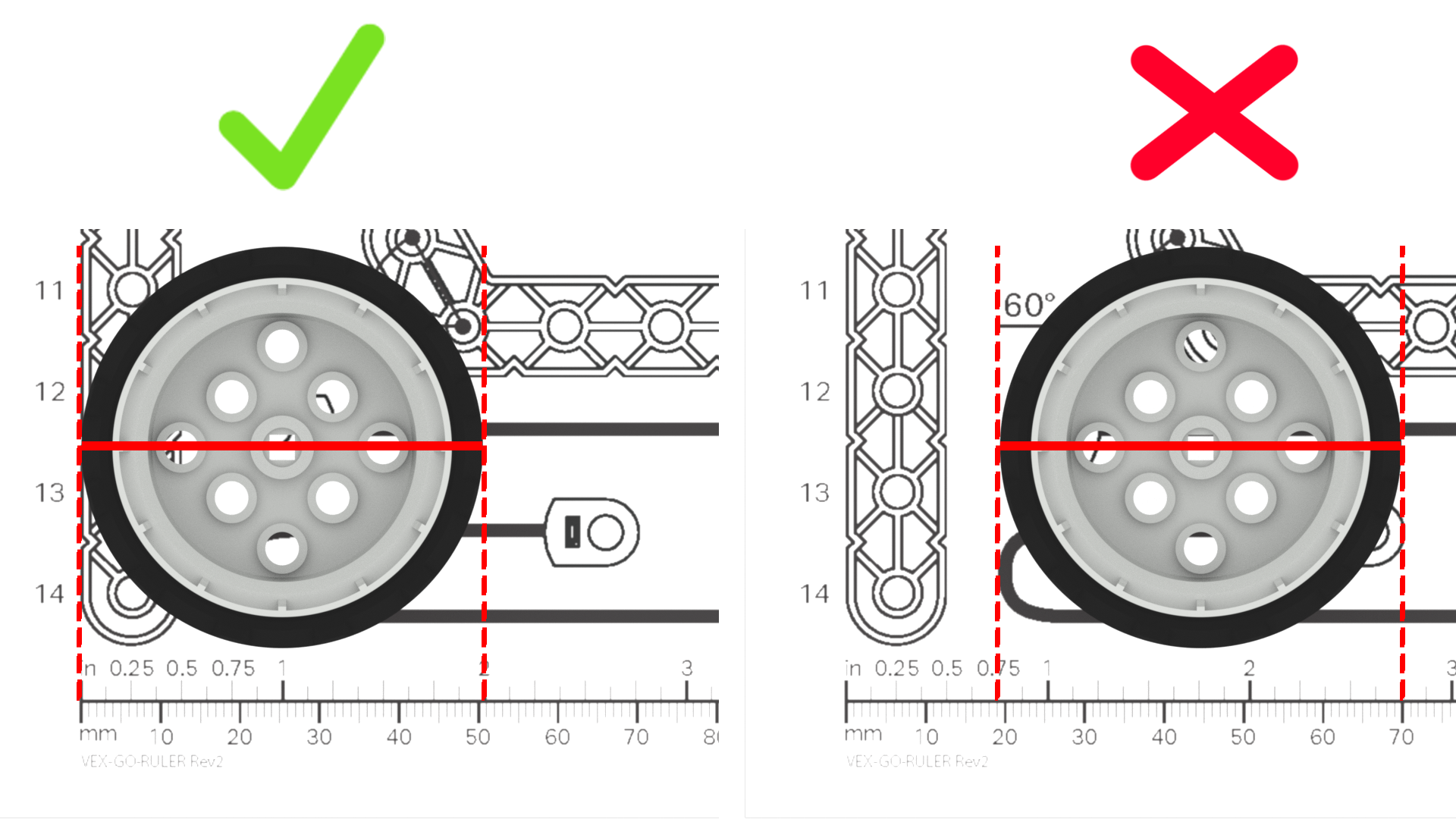
- تأكد من أن الطلاب يعرفون كيفية قراءة العلامات الموجودة على المسطرة التي يستخدمونها، من أجل القياس بدقة. إذا كانت المساطر التي تستخدمها تحتوي على وحدات إمبراطورية ومتري (مثل مسطرة VEX GO القابلة للطباعة) تأكد من ذلك يستخدم الطلاب باستمرار نفس وحدات القياس.
- يمكن تقريب قياساتهم إلى أقرب وحدة، أو جزء من الوحدة. يمكن أن يؤدي التقريب إلى تبسيط العمليات الحسابية، إذا لزم الأمر؛ ولكن يمكن أن يؤدي أيضًا إلى جعل القياسات أقل دقة. على سبيل المثال، قد تطلب من الطلاب تقريب العدد إلى أقرب نصف بوصة أو سنتيمتر، لكن روبوتهم يتحرك لمسافة أبعد قليلاً مما كان مقصودًا في البداية. وبدلاً من ذلك، قد تطلب من الطلاب القياس إلى أقرب ⅛ من البوصة، أو المليمتر، واكتشاف أن الروبوتات الخاصة بهم تتحرك أقرب إلى المسافة المقصودة.
- إذا كان الطلاب بحاجة إلى ممارسة إضافية مع القياس, يمكنك استخدام يمارس قياس نشاط VEX GO مع طلاب فرديين أو مجموعات، أو كنشاط صفي كامل.
رياضيات الدوران 360 درجة
لإكمال العرض في المختبر 5، سوف يقود الطلاب عوامة قاعدة التعليمات البرمجية الخاصة بهم على طول مسار العرض مع الدوران.
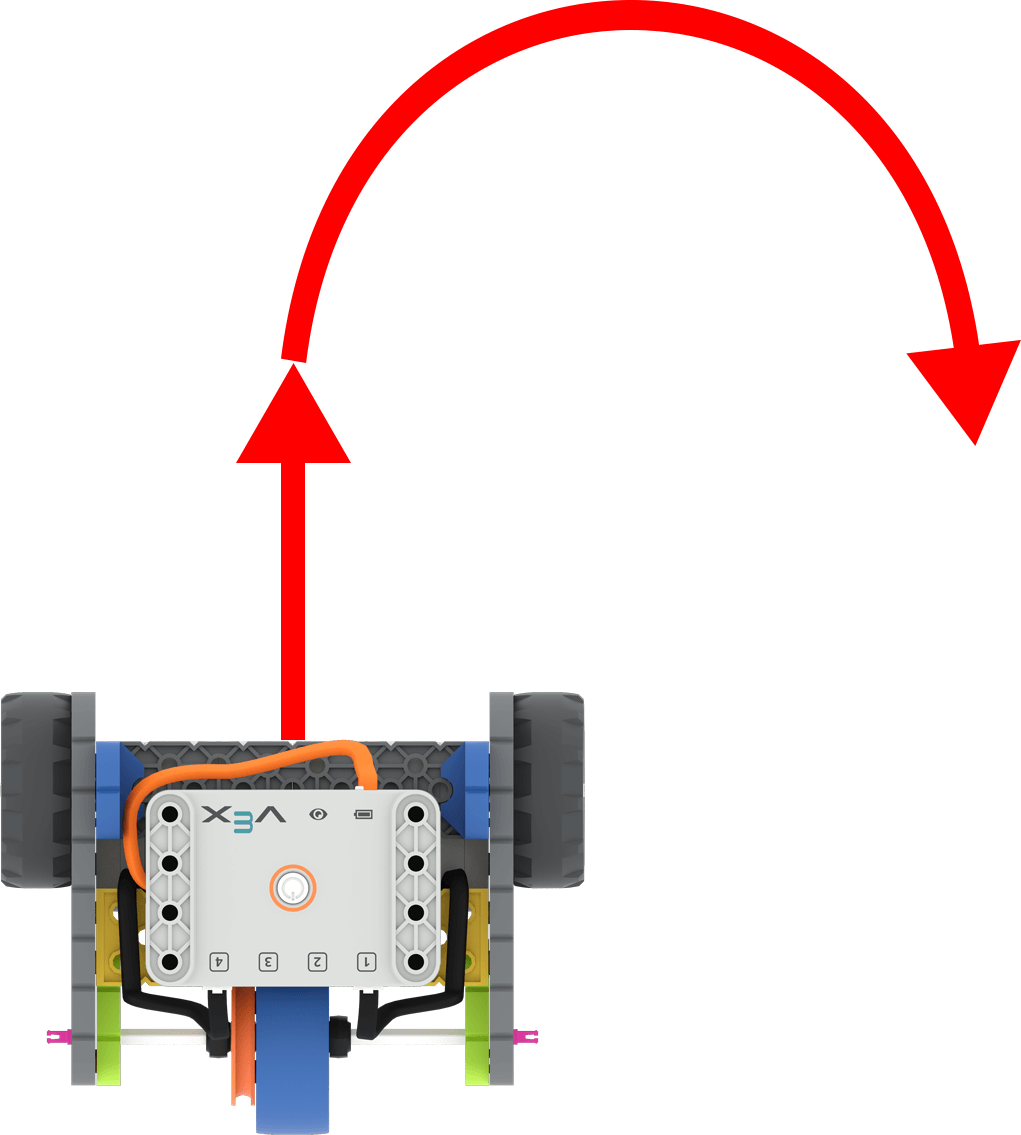
قاعدة التعليمات البرمجية مع الأسهم لإظهار القيادة للأمام ثم الانعطاف إلى اليمين
سيعمل الطلاب على البناء على ما تعلموه حول برمجة الروبوت للسفر لمسافة خط مستقيم، وبرمجة الروبوت للقيادة
لمسافة غير خطية، أو الدوران. لا يزال الطلاب يحسبون عدد الدورات اللازمة لقطع مسافة محددة، لذا سيستخدمون نفس
الصيغة المستخدمة في المختبر السابق.
شاهد الفيديو أدناه لمعرفة كيفية حساب عدد دورات العجلة اللازمة لتحريك دورة 360 درجة للروبوت مع طلابك.
مراجع مفيدة:
عندما تدور قاعدة التعليمات البرمجية، تتحرك عجلات القيادة في اتجاهين متعاكسين لتدوير الروبوت. على سبيل المثال، لتحويل الروبوت إلى اليمين، فإن العجلة اليسرى ستتحرك إلى الأمام، بينما العجلة اليمنى ستتحرك إلى الخلف.
المصطلحات والقيم لقاعدة التعليمات البرمجية:
| شرط | تعريف | مرئي | صيغة | قيمة |
|---|---|---|---|---|
| القطر | قياس خط مستقيم من مركز كل عجلة (يُعرف أيضًا باسم قاعدة العجلات) | 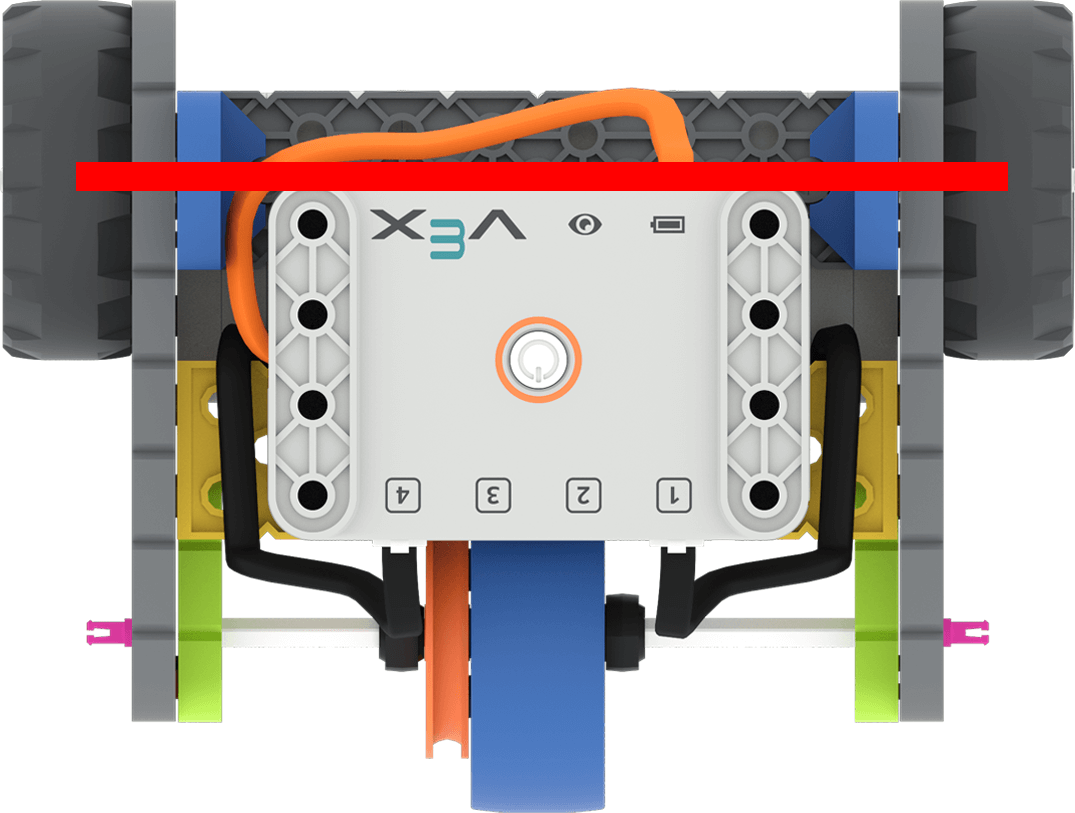 |
د = 2 ر | ~ 135 ملم أو 5.3 بوصة |
| محيط | المسافة الإجمالية التي قطعتها العجلات لإكمال دورة 360 درجة | 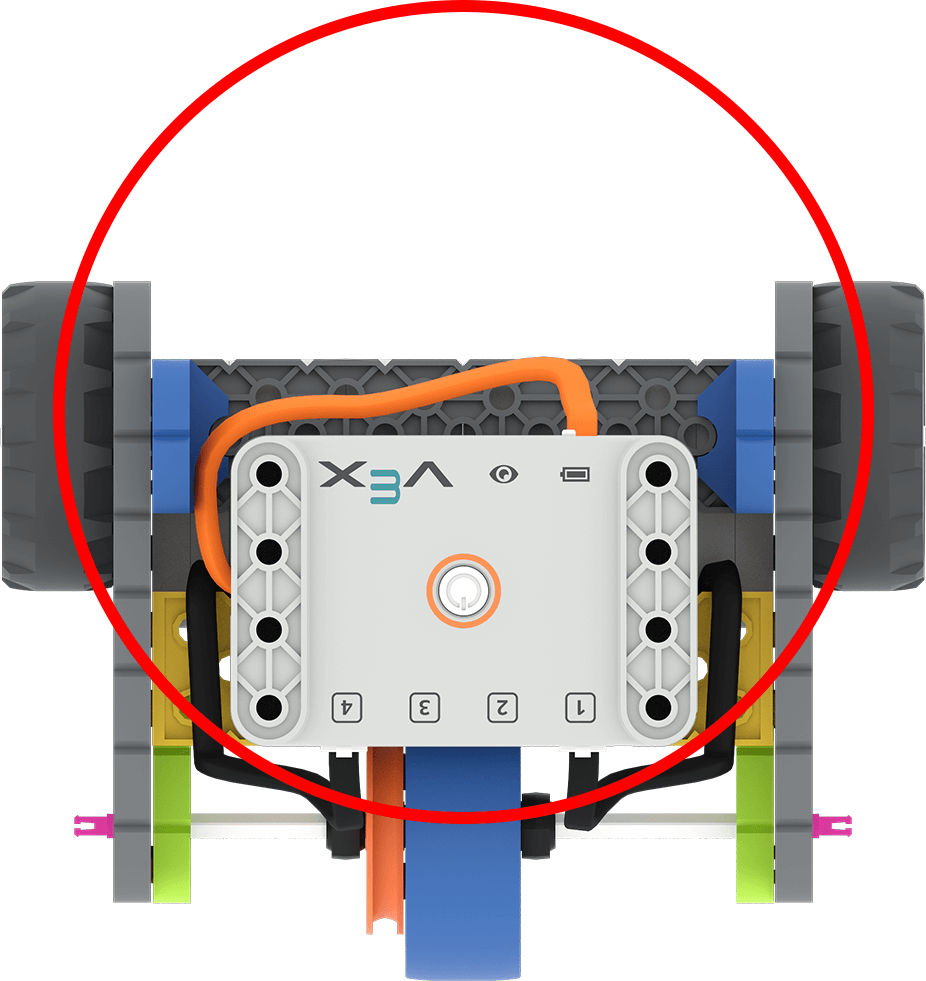
|
ج = ط د | ~ 424 ملم أو 16.7 بوصة |
رياضيات تحويل أي درجة
شاهد هذا الفيديو لمعرفة المزيد حول حساب عدد دورات العجلة اللازمة للروبوت للتدوير بأي درجة.
التحويل إلى درجات
ستقبل الكتلة [Spin for] الدورات أو الدرجات كمعلمات. لاستخدام الدرجات،
قم ببساطة بضرب عدد الدورات في 360. يوضح هذا المثال عدد الدرجات التي ستدور بها المحركات من أجل تدوير
الروبوتدرجة كاملة. لاحظ أنه في هذا المشروع تدور المحركات في اتجاهين متعاكسين، وتمت إضافة "ولا
تنتظر" إلى الكتلة الأولى، بحيث تدور المحركات في وقت واحد. سيؤدي هذا إلى تدوير الروبوت إلى اليمين بزاوية 360
درجة المطلوبة. 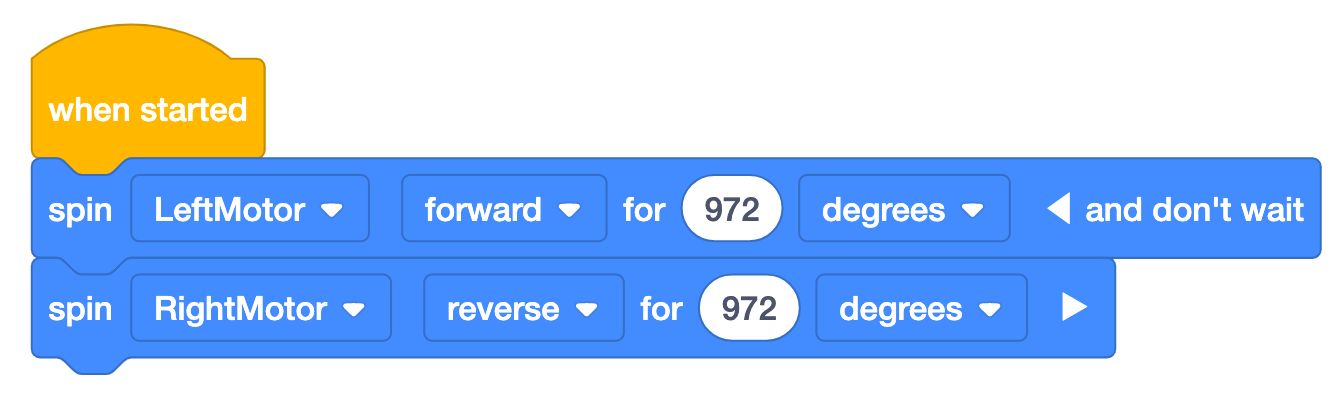
المفاهيم الخاطئة الشائعة
هناك العديد من المفاهيم الخاطئة التي قد تكون لدى الطلاب فيما يتعلق بالقياس والرياضيات الخاصة بالقيادة والانعطاف. هذه بعض الأسئلة الأكثر شيوعًا، مع اقتراحات حول كيفية معالجتها مع طلابك.
| الموقف | مفهوم خاطئ | التصحيح المقترح |
|---|---|---|
|
يسأل المعلم الفصل، ما الذي يجب أن ندخله في كتلة [Spin for] لجعل الروبوت يدور بزاوية 90 درجة؟ يجيب الطالب "90". |
المسافة بالدرجات التي تقودها العجلة لإجراء الدوران تساوي زاوية الدوران. لا يستخدم الطلاب محيط دوران الروبوت لحساب المسافة بالدرجات التي يجب أن تقطعها العجلة. |
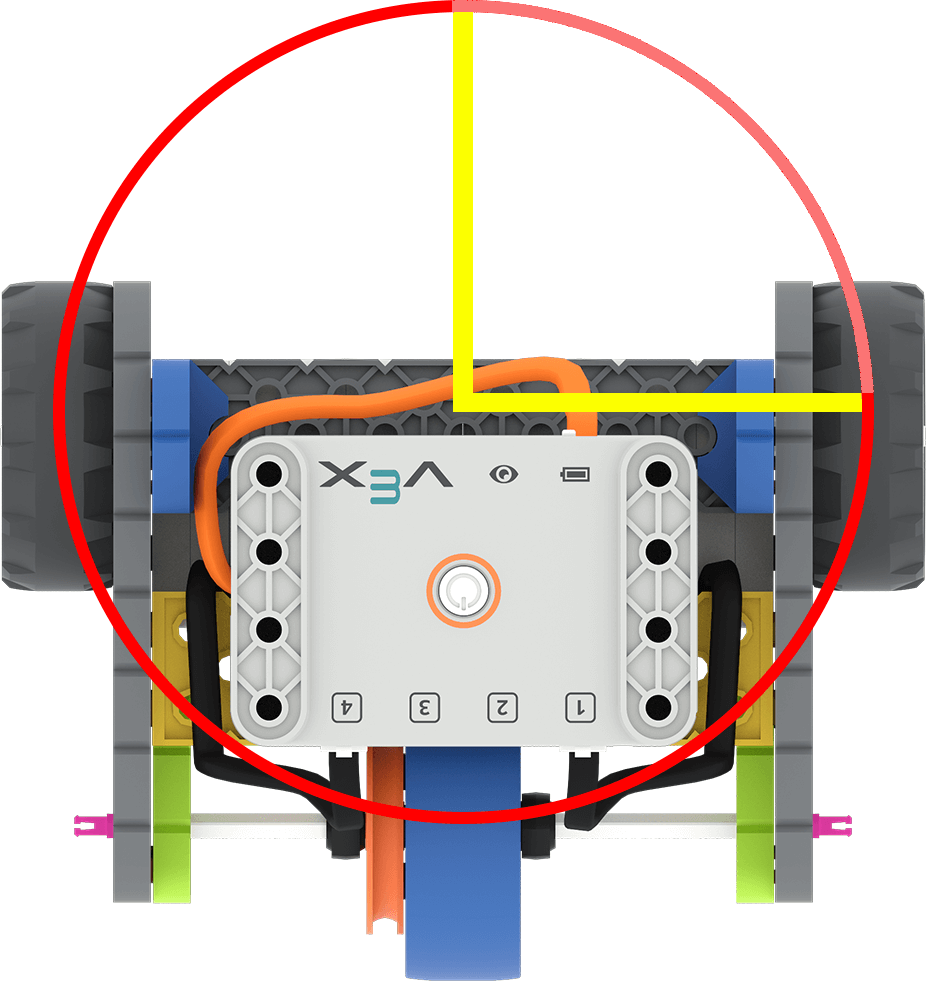
ذكّر الطلاب بأن العجلات تحتاج إلى التحرك على طول محيط الدوران، حتى يتمكن الروبوت من الدوران. (في هذه الصورة، على طول الدائرة الحمراء من خط أصفر إلى آخر.)
قم بتدوير العجلة نفسها بمقدار 90 درجة فقط، لمساعدة الطلاب على تصور مدى دوران العجلة لقطع مسافة معينة. |
|
يسأل المعلم الفصل، ما الذي يجب أن ندخله في كتلة [Spin for] لجعل الروبوت يتحرك 12 بوصة للأمام؟ يجيب الطالب "12". |
عدد دورات العجلة يساوي مسافة القيادة المطلوبة. لا يستخدم الطالب محيط العجلة لحساب عدد دورات العجلة لقطع المسافة المطلوبة. |
ذكّر الطلاب بالمسافة التي يتحركها الروبوت بدورة عجلة واحدة، واسألهم إذا كان 12 دورة كاملة تبدو كثيرة جدًا أو قليلة جدًا لقيادة 12 بوصة. لمساعدة الطلاب على تصور ذلك بشكل أفضل، قم بتدوير عجلة على طول المسطرة لمدة 12 دورة، لإظهار للطلاب مدى هذه المسافة.
ذكّر الطلاب بأن دورة واحدة للعجلة هي محيط العجلة، ويجب تقسيم 12 بوصة على هذا المحيط. |
| يقوم الطالب بقياس العجلة، ولكن يوجد أي من حواف العجلة على علامة الصفر للمسطرة. |
يبدأ المسطرة من 1، وليس الصفر. الطالب لا يستخدم المسطرة بشكل صحيح للحصول على قياس دقيق. |
ذكّر الطلاب بأن المسطرة تبدأ عند علامة "0"، وإذا لم يقيسوا من تلك النقطة، فستكون قياساتهم غير صحيحة. قد ترغب في وضع علامة على بداية المسطرة بشريط لاصق أو قلم ملون، كمساعدة بصرية إضافية للطلاب أثناء عملهم. (لمزيد من التدريب على القياس، يمكن للطلاب إكمال يمارس نشاط القياس.) |
|
يقول أحد الطلاب أن مشروعه لا يعمل. يلاحظ المعلم أن العدد الصحيح لدورات العجلة موجود في كتلة [الدوران من أجل]، ولكن المعلمة مضبوطة على 'درجات'. |
الوحدات أو المعلمات قابلة للتبادل. الطلاب لا يهتمون بالمعلمات/وحدات القياس في مشروعهم. |
اسأل الطلاب عن وحدة القياس التي يستخدمونها، وما إذا كانت تتطابق مع المعلمة الموجودة في الكتلة.
|
| يحاول الطالب إدخال "21/4" في معلمة كتلة [Spin for]، لإدخال "2 ¼ دورة". |
يتم كتابة الكسور والأعداد العشرية بنفس الطريقة. الطالب لا يحول الكسر إلى عدد عشري. |
ذكّر الطلاب بأنهم بحاجة إلى تحويل الكسور إلى أعداد عشرية حتى تصبح معلمات قابلة للتعرف عليها.
للقيام بذلك، قم بقسمة البسط على المقام. 2 ¼=94 =2.25 قد ترغب في أن يقوم الطلاب بإعداد مخطط للقيم الكسرية المستخدمة بشكل متكرر وما يعادلها من الأعداد العشرية لإنشاء مواردهم الخاصة. |
|
يطلب المعلم من الطلاب مشاركة حساب محيط العجلة الخاص بهم. إجابات الطلاب |
يتم حساب المحيط باستخدام نصف القطر -πxنصف القطر. الطالب يستخدم القياس الخاطئ في الحساب. |
ذكّر الطلاب بأن المحيط هو π x
القطر; والقطر خط مستقيم عبر المركز
العجلة (أو ضعف نصف القطر).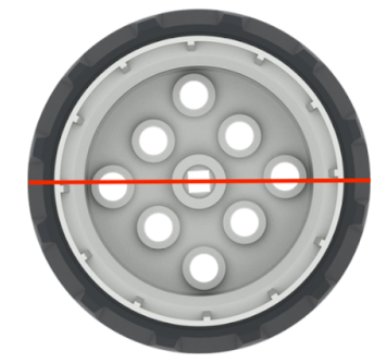 قد ترغب في قياس وحساب القيمة كنشاط صفي كامل إذا كان العديد من الطلاب يواجهون صعوبة في استخدام الصيغ. |
 ذكّر الطلاب بأن حساباتهم ستعمل كما هو مقصود فقط إذا تم ضبط المعلمة على
الوحدة الصحيحة. الدورات والدرجات ليس لها نفس القيمة.
ذكّر الطلاب بأن حساباتهم ستعمل كما هو مقصود فقط إذا تم ضبط المعلمة على
الوحدة الصحيحة. الدورات والدرجات ليس لها نفس القيمة.
حلول نموذجية
حل مثال للمختبر 4
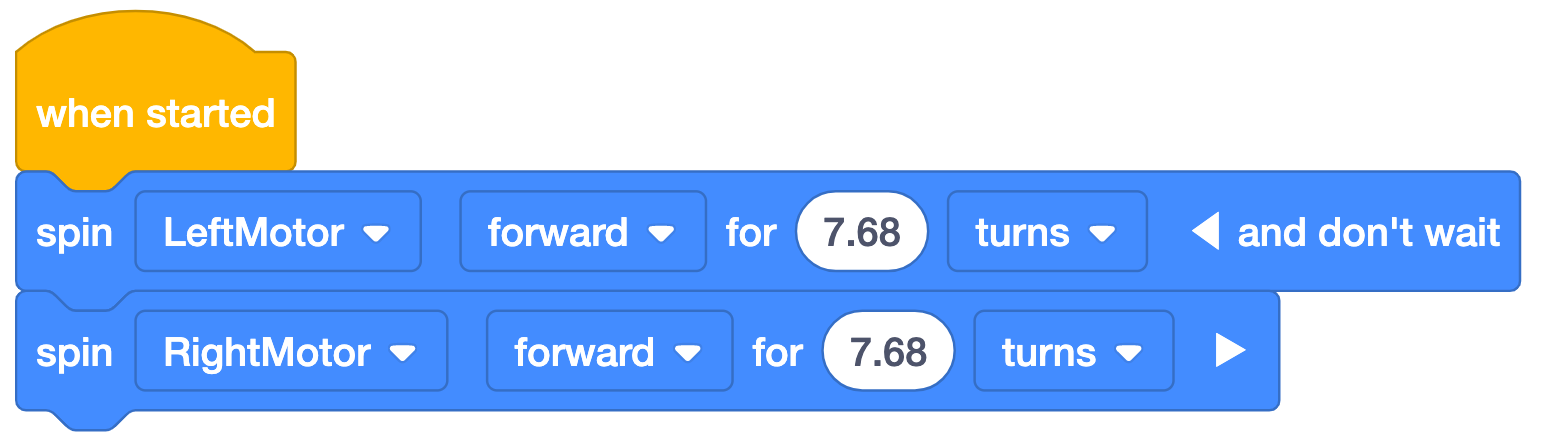
*ملاحظة: يتم استخدام ولا تنتظر" مع الكتلة الأولى في مشروع المثال حتى يتم تنفيذ الكتلتين في وقت واحد. بدون "ولا تنتظر"، فإن المحرك الأول سوف يدور، ثم الثاني، ولن تعمل قاعدة التعليمات البرمجية كما هو مقصود. تأكد من أن الطلاب لا يقومون بإلغاء "ولا تنتظر"، وإلا فلن يتم تنفيذ مشروعهم كما هو مقصود.

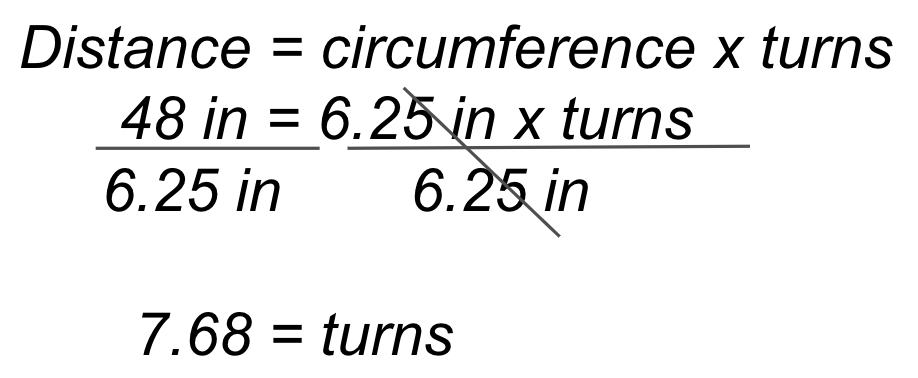
لقيادة مسافة 48 بوصة (~122 سم) من مسار العرض، سوف تحتاج قاعدة التعليمات البرمجية إلى السفر إلى 7.68
دورة. يتم عرض الحساب على اليسار، وحل VEXcode GO المثالي على اليمين.
حل مثال للمختبر 5
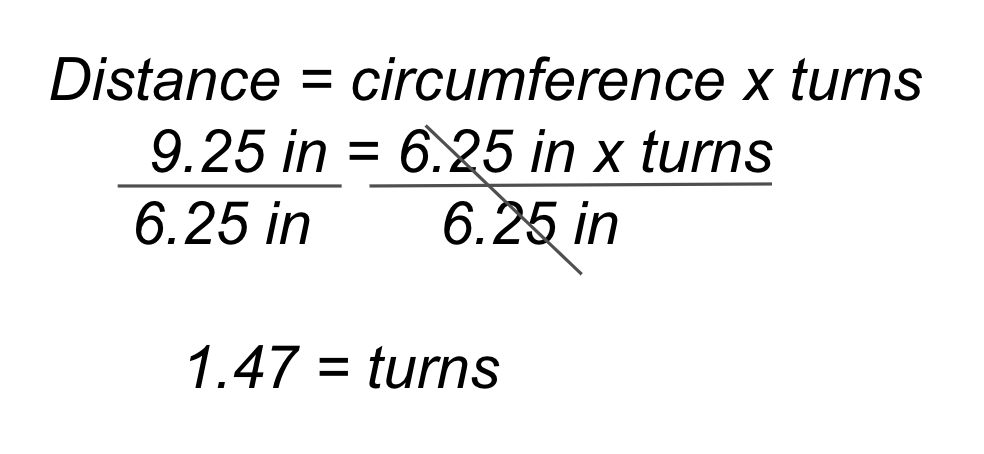
لقيادة مسافة 48 بوصة (~122 سم) من مسار العرض والانعطاف 180 درجة، ستحتاج قاعدة التعليمات البرمجية إلى السفر للأمام لمدة ~7.68 دورة، ثم محرك واحد للأمام والآخر للخلف لمدة ~1.47 دورة. يتم عرض الحساب جنبًا إلى جنب مع حل VEXcode GO المثال على اليمين.
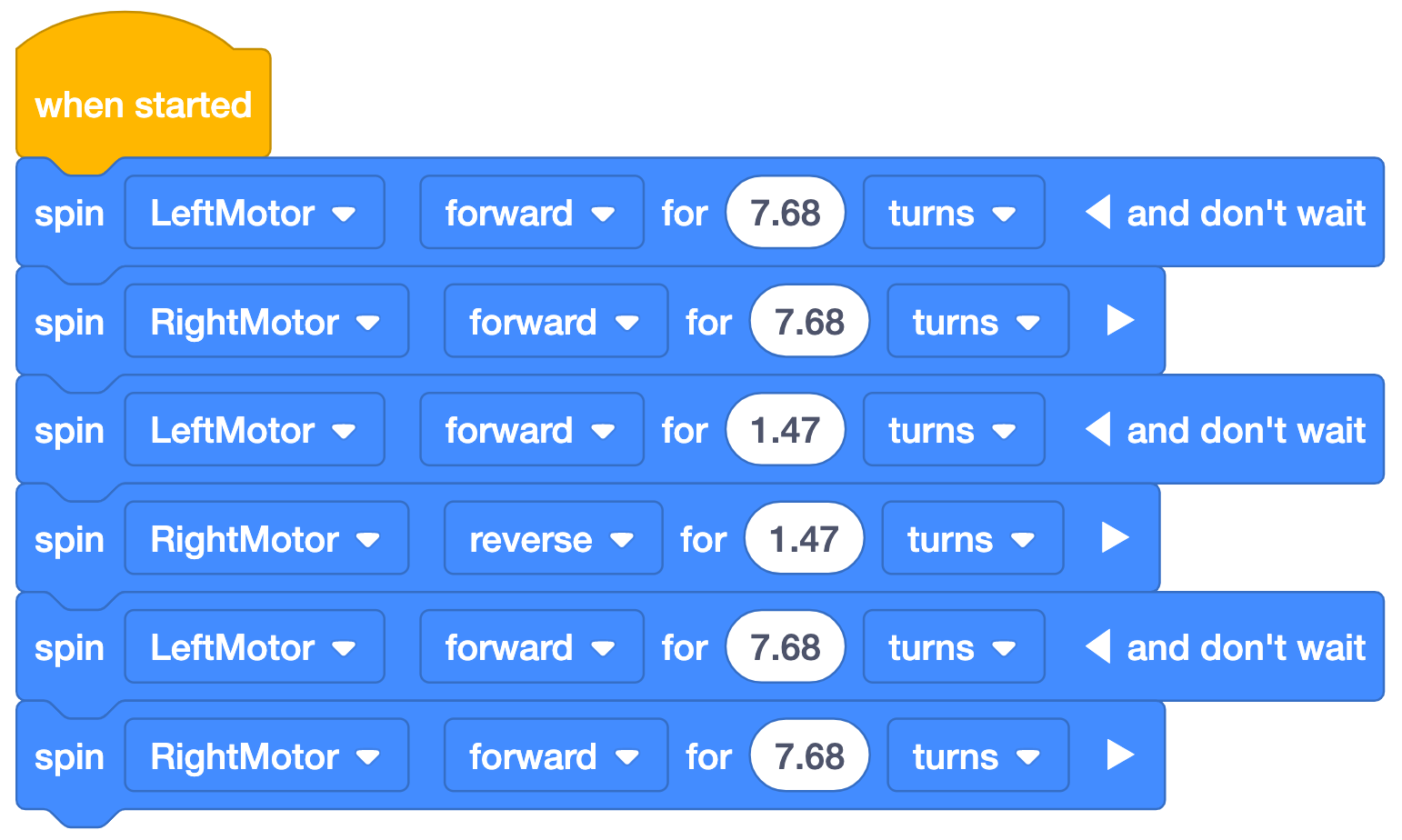
ملاحظة: لاستخدام الدرجات بدلاً من الدورات، اضرب في حسابات الدورات في
360.
مسار العرض التوسعي
إذا احتاج الطلاب إلى تحدي إضافي، فيمكنك توسيع مسار العرض بعدة طرق مختلفة. هذا مجرد مثال واحد، مع حل محتمل.
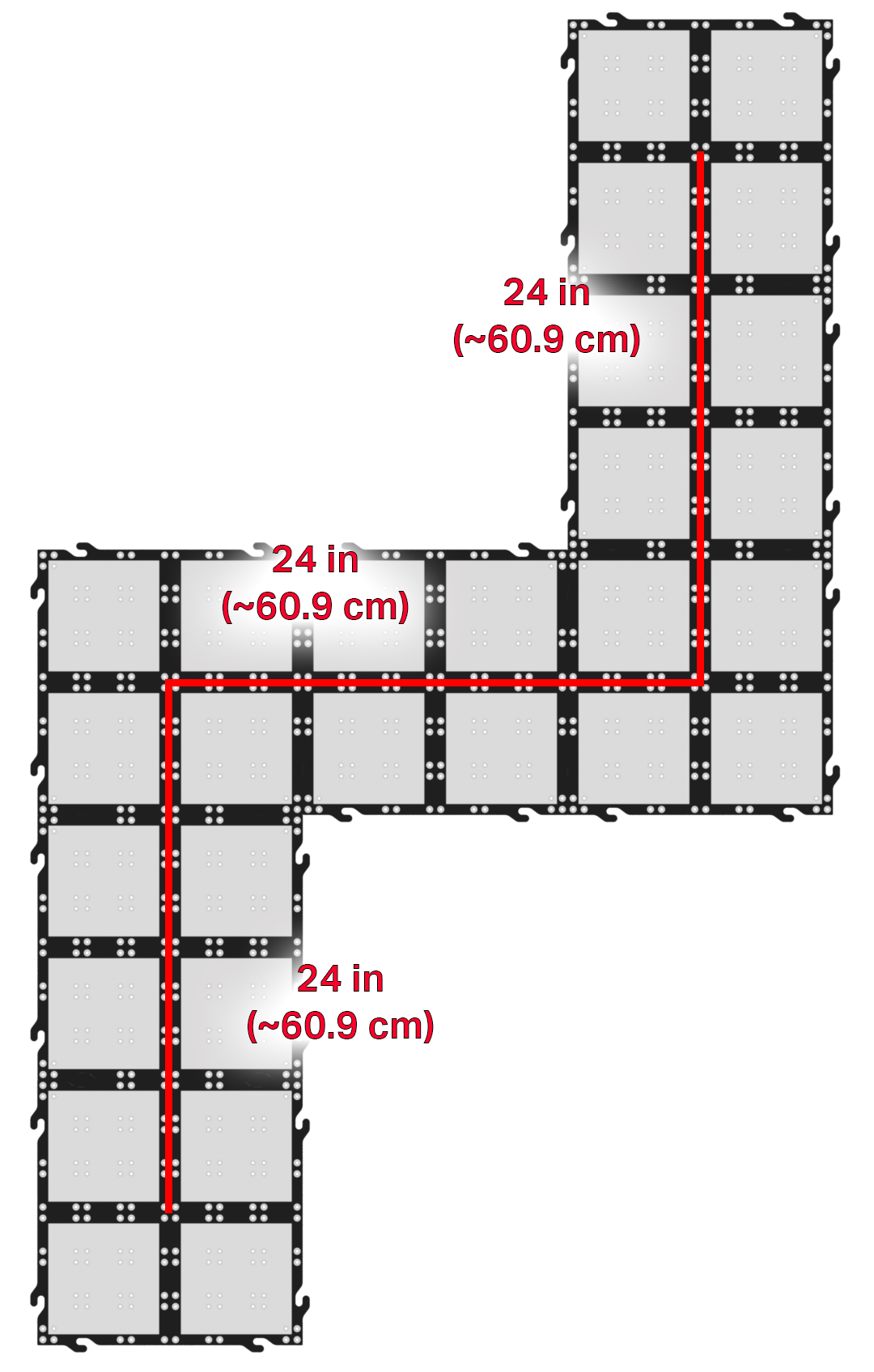
في هذا المسار النموذجي، يتم تقليص مسافات القيادة والانعطافات من المختبرات إلى النصف. ومع ذلك، في هذا
الطريق، اتجاه المنعطفات هو المهم. بالإضافة إلى إعادة الحساب، سيتعين على الطلاب معرفة الاتجاهات اللازمة
لتدوير العجلات لتدور في الاتجاه المطلوب.
الحسابات المقسمة إلى نصفين من المختبرات السابقة هي كما
يلي:
مسافة القيادة = ~ 3.84 دورة
مسافة الدوران = ~ 0.73 دورة
يتم استخدام هذه القيم في حل VEXcode GO المثال التالي:
