
Pozadí
V této kódovací lekci se studenti naučí, jak pracovat s VEXcode GO a robotem Code Base k řešení reálných problémů s kódovacími roboty na pracovišti. Studenti se naučí, jak plánovat, vytvářet a spouštět projekty VEXcode GO s robotem Code Base na základě čtyř reálných scénářů.
Jaké druhy prací roboti vykonávají?
Roboti dokáží vykonávat práce, které jsou pro lidi příliš špinavé, nudné nebo nebezpečné. Mnoho z těchto prací také není dobře placených. Například lidé riskují své životy při plnění úkolů, jako je hašení požárů nebo potápění hluboko v oceánu. Roboti mají hardware, který jim umožňuje fungovat v těchto typech prostředí, což z nich činí vhodnější a bezpečnější volbu. Průmyslová odvětví implementují roboty na pracovištích, aby vykonávali tyto špinavé, nudné nebo nebezpečné práce na ochranu lidí a zároveň uvolnili lidské zdroje pro práci na složitějších nebo interaktivnějších procesech. Lidé mají stále spoustu práce, i když tyto špinavé, nebezpečné a nudné práce převezmou roboti. Technologický pokrok přinesl změny v celé historii průmyslu. Roboti se v tom neliší.

Každá lekce v této jednotce zkoumá reálný scénář, ve kterém roboti vykonávají špinavou, nebezpečnou a nudnou práci v různých odvětvích. Studenti mohou být inovativními řešiteli problémů tím, že vytvářejí řešení pro výzvy z reálného života, jako je například programování robotů pro provádění špinavých, nudných a nebezpečných úkolů. Studenti budou pomocí sad VEX GO analyzovat možnosti pohybu robota Code Base pomocí VEXcode GO a tyto znalosti využijí k brainstormingu různých úkolů, scénářů nebo problémů, které lze pomocí robota Code Base vyřešit.
Špinavá práce
Špinavá práce je nehygienická nebo nebezpečná práce, která může mít negativní dopad na lidské zdraví. Roboti mohou vykonávat tyto nepříznivé úkoly a omezit vystavení lidí nehygienickým podmínkám. Podívejte se na video níže, kde najdete příklad robota pracujícího v prostředí špinavého tunelu.
Roboti byli nasazováni do špinavých prací, jako je průzkum dolů a průzkum kanalizace. Když se vyskytne problém s kanalizačním potrubím, posádka ho uzavře, vykope, aby se k potrubí dostala, a poté opraví infrastrukturu. Robot ale dokáže čistit, mapovat a kontrolovat potrubí ještě předtím, než k problémům dojde.
Nudné práce
Práce, které vyžadují opakující se funkce a málo lidského myšlení, jsou považovány za nudné. Často zahrnují procesy, jejichž jediným cílem je efektivita a výstup. Roboti mohou pracovat nepřetržitě a zefektivnit nudné úkoly, což uvolňuje lidský kapitál pro úkoly, které mají prvek rozmanitosti a vyžadují kritické myšlení.

Například s růstem elektronického obchodování roste potřeba center pro vyřizování objednávek. Roboti prodlužují dobu od objednávky po dodání, snižují chyby a minimalizují zátěž lidských pracovníků.
Nebezpečná povolání
Nebezpečná povolání staví lidi do nebezpečných situací. Roboti mohou být v těchto pracích použiti k prevenci zranění. Roboti dokáží zneškodňovat bomby, cestovat po vzdálených planetách, kontrolovat nestabilní struktury a pomáhat s hašením požárů. Roboti sice nemusí nutně vyloučit lidi z rovnice, ale mohou být naprogramováni nebo ovládáni na dálku, čímž se pracovníci vyhnou těm nejnebezpečnějším situacím.

Roboti mohou hasičům pomoci s vyhodnocením hořících budov. SmokeBot vytváří mapy interiéru, které mohou hasiči později použít k orientaci v hořící budově. Robot Thermite má hadici, která je schopna čerpat 1 893 litrů (cca 500 galonů) vody za minutu. Robot Thermite využívá namontované kamery, takže se může pohybovat v extrémně nebezpečných požárech a být přitom ovládán až ze vzdálenosti čtvrt míle.
Co je to hnací ústrojí?
Pohon umožňuje robotovi pohybovat se vpřed, vzad, doleva nebo doprava pomocí kol nebo jiných metod.
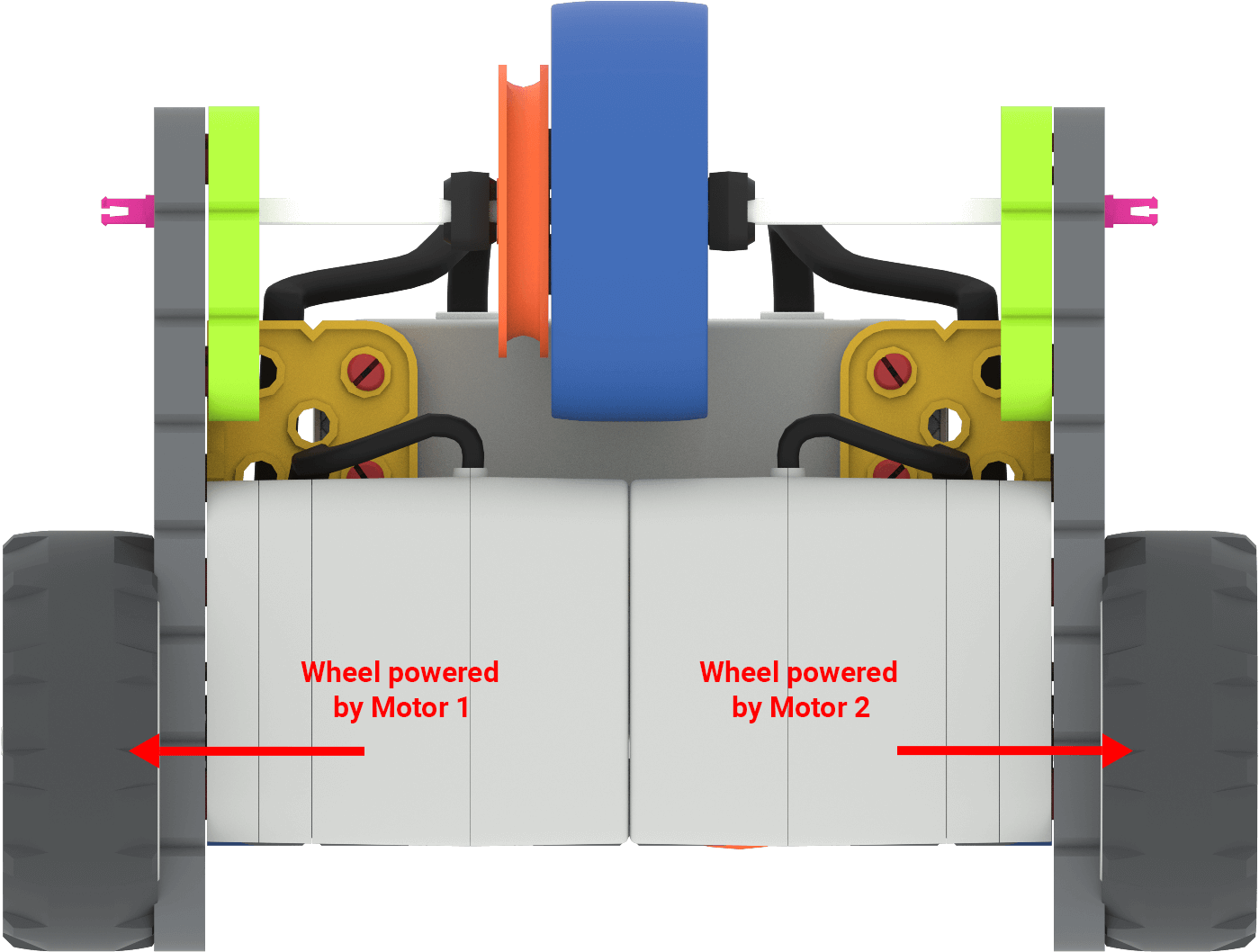
Robot Code Base má dvoumotorový pohon, protože jsou poháněny dva motory (jeden na levé a jeden na pravé straně). Přestože má robot Code Base čtyři kola, pouze dvě z nich jsou poháněna motory. Modrá kolečka pomáhají robotovi z Code Base zůstat stabilní, aby se nepřevrátil. Dokážete si představit, že by se Code Base pokusila pohybovat pouze se dvěma koly? Pravděpodobně by se převrátilo, jakmile by se rozjelo dopředu nebo dozadu.
Jak se robot s kódovou základnou otáčí pomocí hnacího ústrojí?
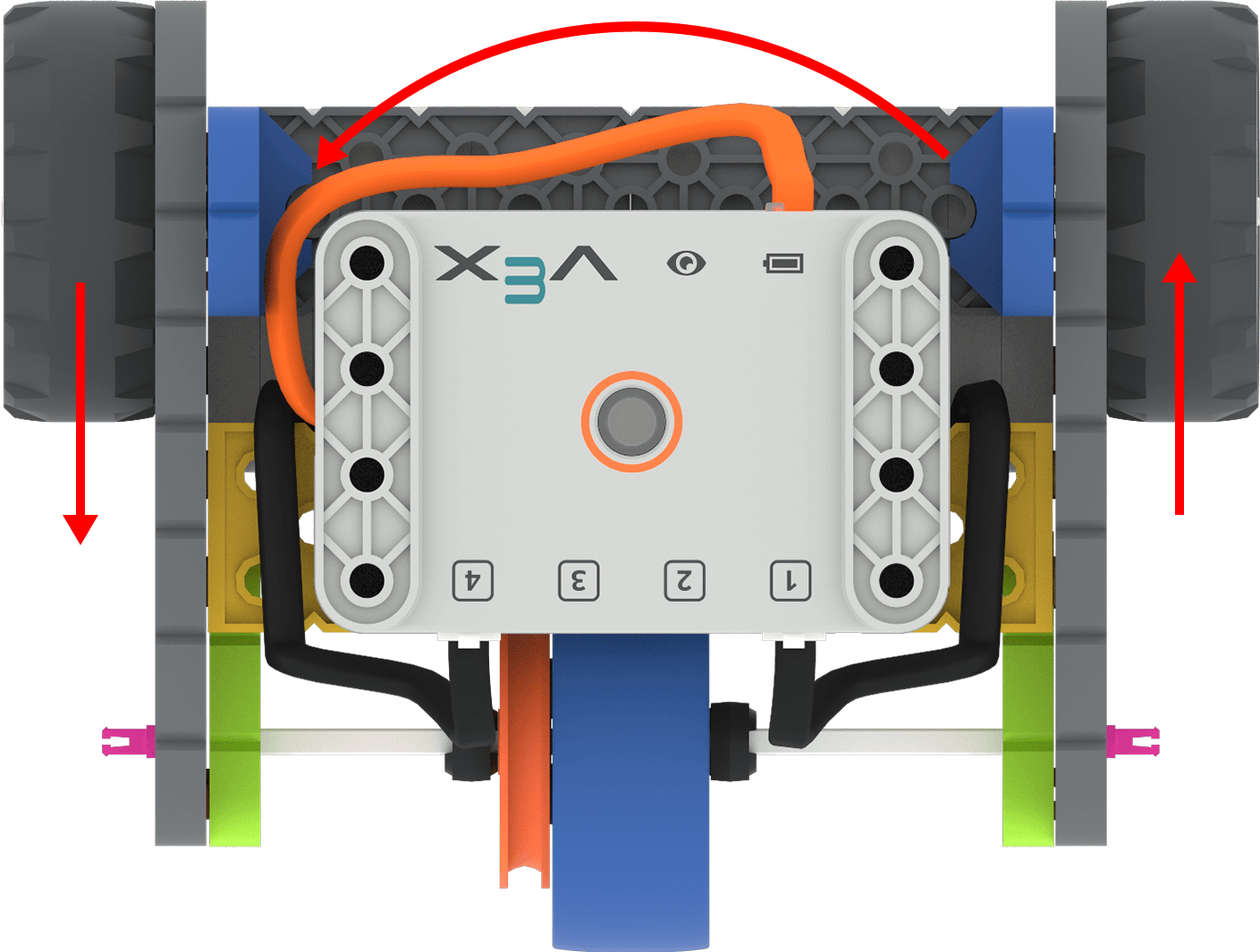
Robot Code Base se zatáčí otáčením kol v opačných směrech. Pro provedení zatáčky doleva se levé přední kolo robota s kódem Code Base bude otáčet dozadu, zatímco pravé přední kolo se bude otáčet dopředu.
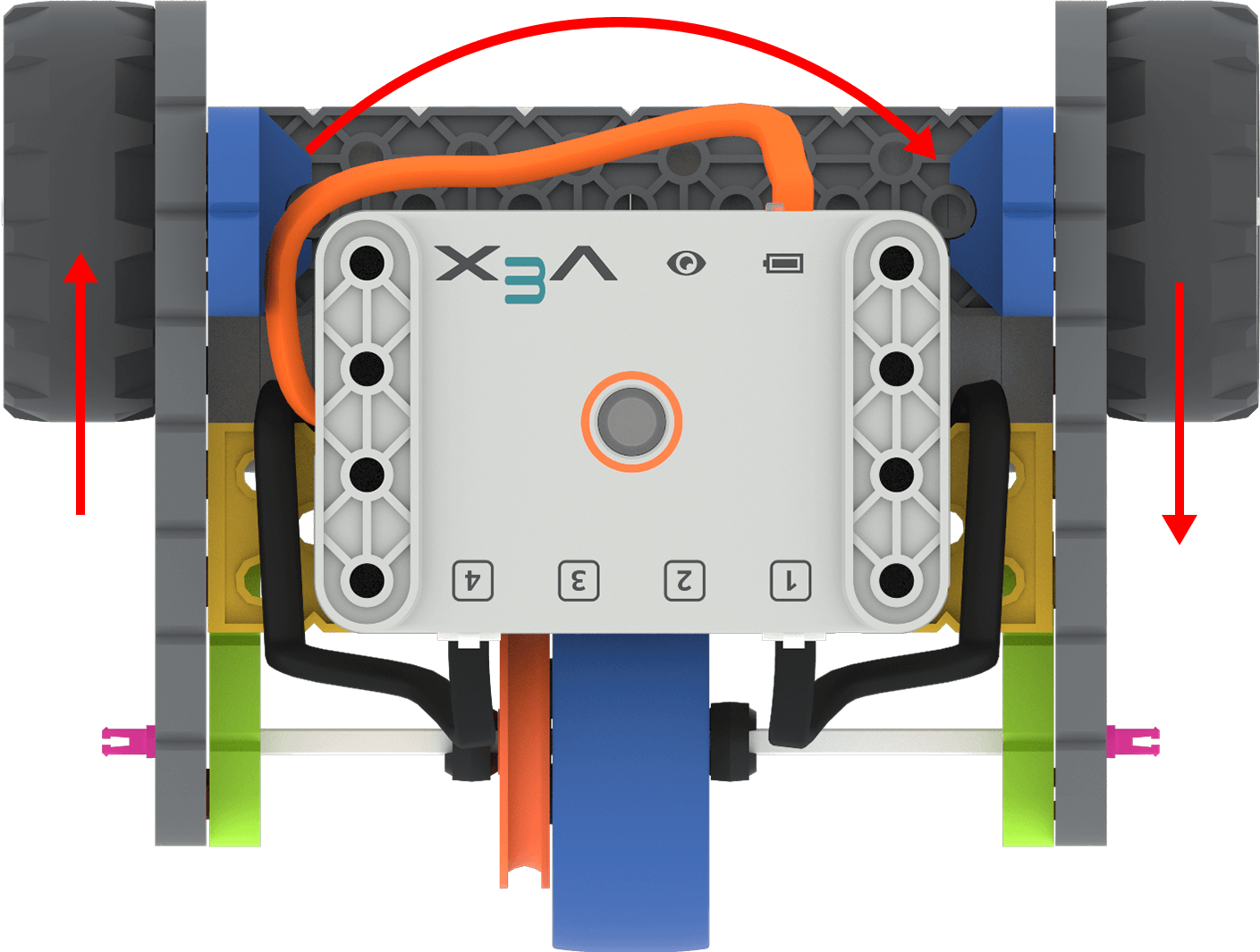
Pro provedení zatáčky vpravo se levé přední kolo robota Code Base bude otáčet dopředu, zatímco pravé přední kolo se bude otáčet dozadu.
Co je VEXcode GO?
VEXcode GO je kódovací prostředí, které se používá ke komunikaci s roboty VEX GO. Studenti používají rozhraní drag and drop k vytváření projektů VEXcode, které ovládají akce jejich robotů. Účel každého bloku lze identifikovat pomocí vizuálních podnětů, jako je jeho tvar , barva a označení.
V této lekci budou představeny následující bloky VEXcode:
{When started} - spustí připojený zásobník bloků při spuštění projektu.
 |
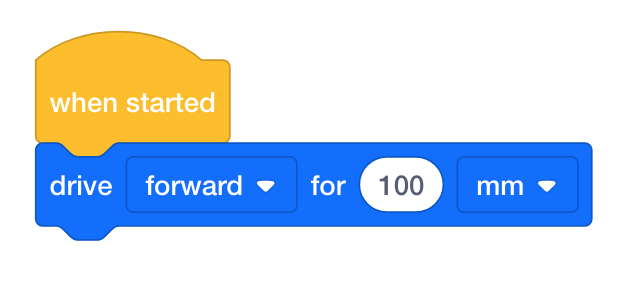 |
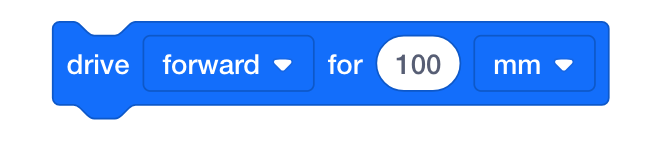
[Jet po dobu] - pohybuje hnacím ústrojím vpřed nebo vzad o danou vzdálenost. Zvolte směr, kterým se bude hnací ústrojí pohybovat, a nastavte, o kolik se bude pohybovat, zadáním hodnoty do oválu.
 |
 |
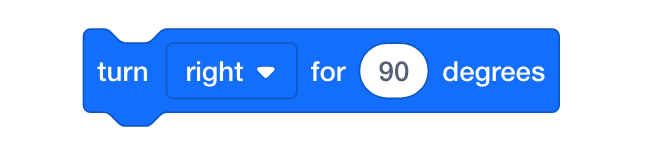
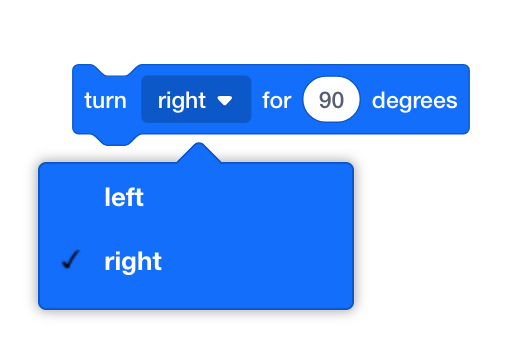
[Otočit o] - otočí hnací ústrojí doleva nebo doprava o daný počet stupňů. Zvolte směr otáčení hnacího ústrojí a nastavte, o kolik se bude pohybovat, zadáním počtu stupňů do oválu.
 |
 |
Co je dekompozice a sekvenování v programování?
Aby bylo možné robotovi přesně a přesně sdělit, jak se má pohybovat, je zapotřebí jak dekompozice, tak sekvenování. Zaprvé, problém, například jak se v dané výzvě orientovat, bude rozložen na menší části a chování. Jakmile jsou tyto vzorce chování identifikovány, je třeba je uspořádat do správné posloupnosti. To je důležité, protože robot se bude pohybovat přesně tak, jak je naprogramován.
Rozklad
Dekompozice zahrnuje rozložení složitého problému na chování, které je lépe zvládnutelné a snáze pochopitelné. Rozdělení problému na menší části znamená, že každou část lze podrobněji prozkoumat a snáze vyřešit. Například pokud chce student, aby se jeho robot pohyboval ve čtverci, musel by ho rozdělit na menší příkazy. Pro studenty je důležité si procvičit zdokonalení procesu rozkladu, protože zpočátku nemusí rozdělit příkazy na menší komponenty:
| Pohyb ve čtvercovém rozpisu 1 | Pohyb ve čtvercovém rozpisu 2 | Pohyb ve čtvercovém rozpisu 3 |
|---|---|---|
|
|
|
Sekvenování
Sekvence je specifické pořadí, ve kterém jsou chování prováděna. Akce nebo událost vede k další seřazené akci v posloupnosti. Sekvence je důležitá, aby studenti mohli naprogramovat své roboty tak, aby správně provedli úkol.
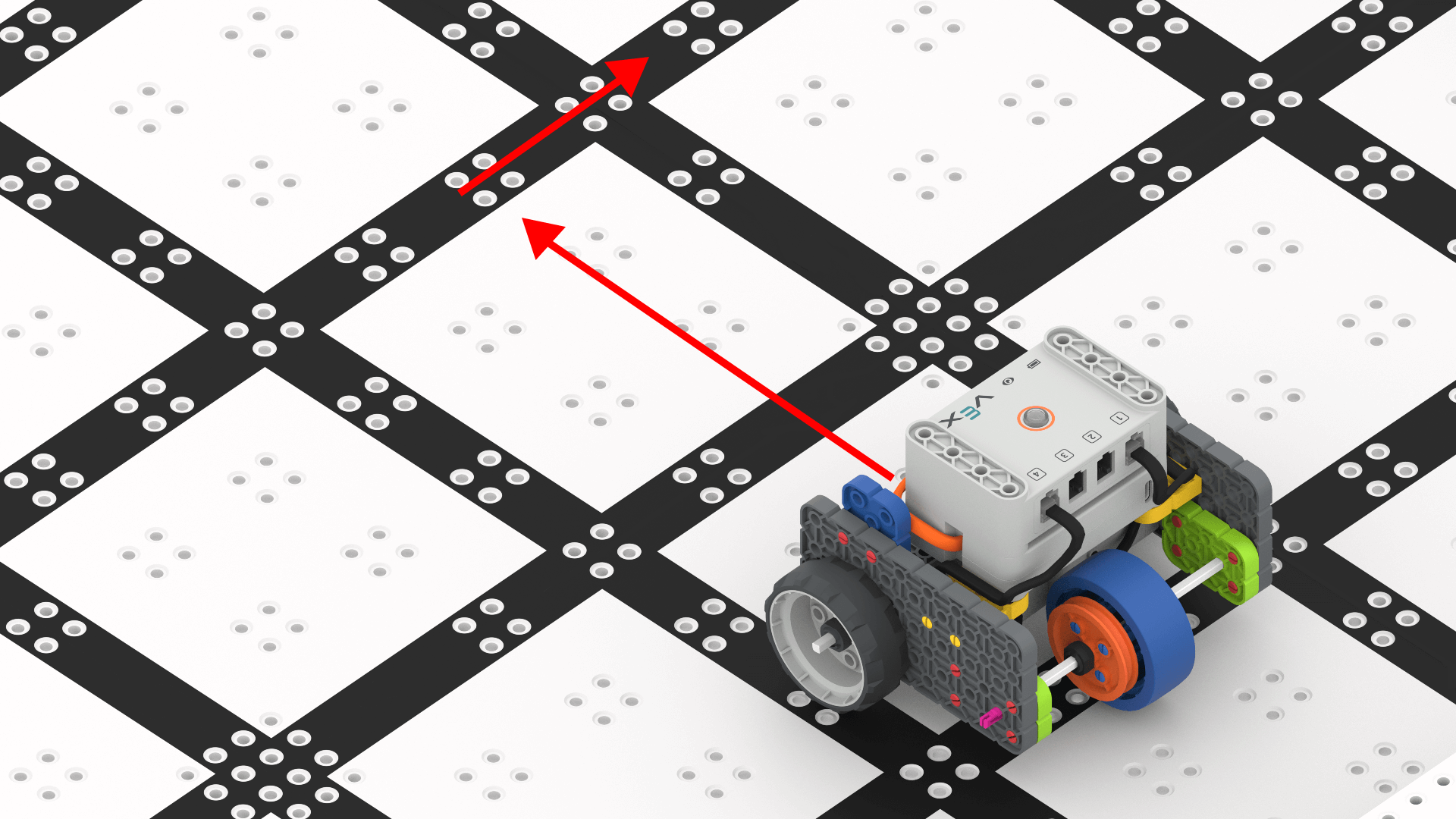
Studenti naprogramují svého robota s kódovou základnou tak, aby plnil různé úkoly napodobující autentické práce, které roboti vykonávají. Budou muset seřadit příkazy ve svém programu tak, aby se jejich robot s kódovou základnou pohyboval vpřed, vzad, vlevo a vpravo ve správném pořadí, aby se mohl orientovat v úkolech.
- Pohyb vpřed
- Odbočte doprava
- Pohyb vpřed
Dílky VEX GO
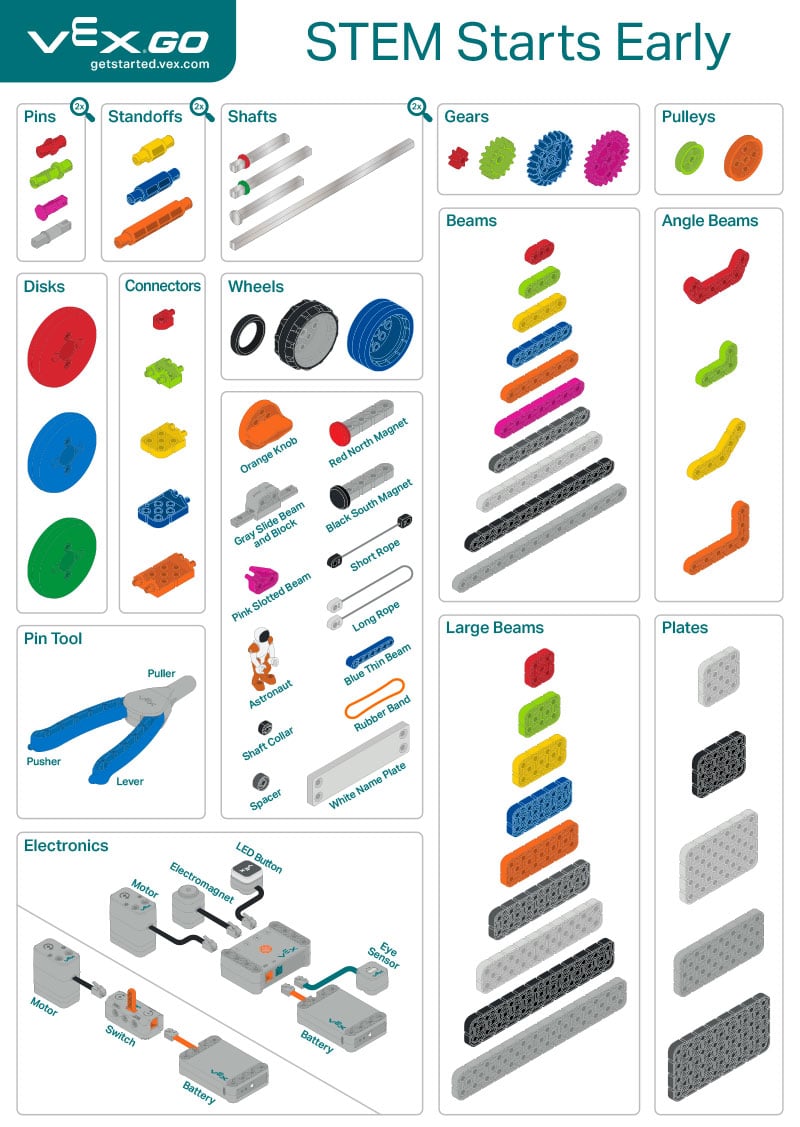
Následující díly VEX GO jsou nezbytnými součástmi sestavení robota z Code Base. Plakát VEX GO ilustruje všechny díly VEX GO a uspořádá je podle jejich funkce ve stavebnici. Více informací o dílcích VEX GO naleznete v článku dílků v sadě VEX GO v knihovně VEX.
Elektronika
Elektronické součástky se používají k napájení a ovládání funkcí sestavení VEX GO.
Baterie je nezbytná pro jakoukoli sestavu VEX GO, která obsahuje elektroniku. Baterie napájí elektronické součástky VEX GO.
Brain je nezbytný pro jakoukoli sestavu VEX GO, která je zahájena projektem VEXcode GO. Mozek spouští uživatelské projekty a ovládá zařízení připojená k mozku.
Motor přeměňuje energii na pohyb, který lze využít při stavbě. Motor lze připojit k mozku a ovládat jej pomocí projektu VEXcode GO.