
Pozadí
V této lekci se studenti seznámí s vývojem robotického ramene od manuálního přes motorizované až po automatizované a s tím, jak jej lze ovládat k provedení úkolu ručně, pomocí spínačů a kódu. V průběhu této lekce budou mít studenti možnost přemýšlet a diskutovat o konceptech týkajících se mechanizace, automatizace, toku projektu a podmíněných příkazů a propojit je s lidskými a robotickými procesy.
Sestavení a funkce v této jednotce
V této jednotce jsou čtyři sestavení:
- Manuální robotické rameno
- Motorizované robotické rameno
- Robotické rameno Code, které se pohybuje po 1 ose
- Robotické rameno Code, které se pohybuje po 2 osách
Tyto sestavy lze dokončit jednotlivě (sestavit od nuly pro každou laboratoř) nebo jako přechodnou sestavu (první sestava se v následujících laboratořích upraví). Mezi klíčové vlastnosti každé sestavy patří:
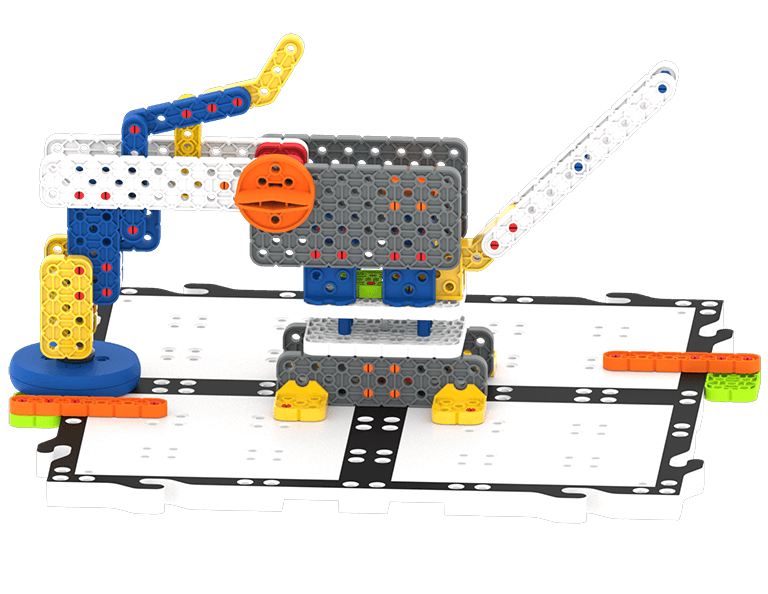
Robotické rameno: Ručně ovládané robotické rameno, které se ovládá pohybem bílého dlouhého paprsku pro otáčení ze strany na stranu nebo oranžovými knoflíky pro pohyb ramene nahoru a dolů. Tato konstrukce používá k zvedání disků magnet směřující sever-jih.
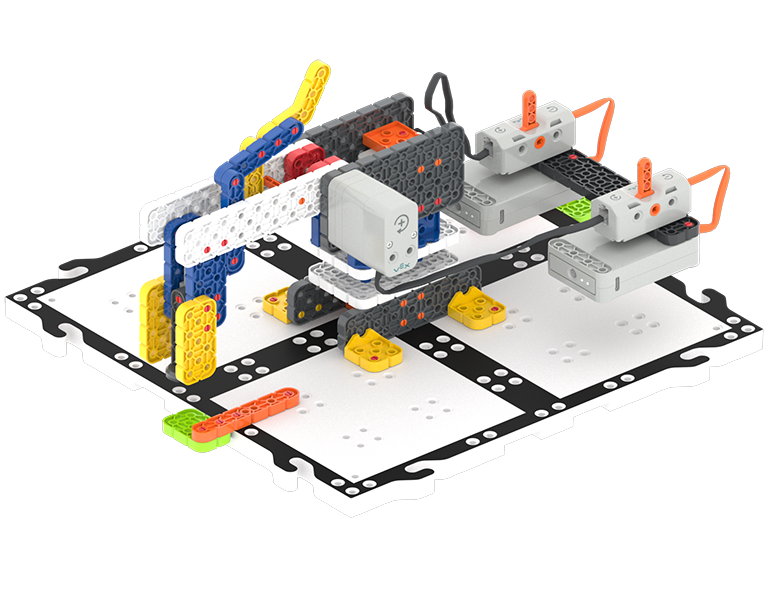
Motorizované robotické rameno: Robotické rameno, které k pohybu používá motory a spínače. Motory a spínače jsou připojeny k baterii. Tato konstrukce také používá magnet sever-jih ke zvedání disků.
- Poznámka: Tato sestava vyžaduje 2 sady GO k dokončení 1 robotického ramene.
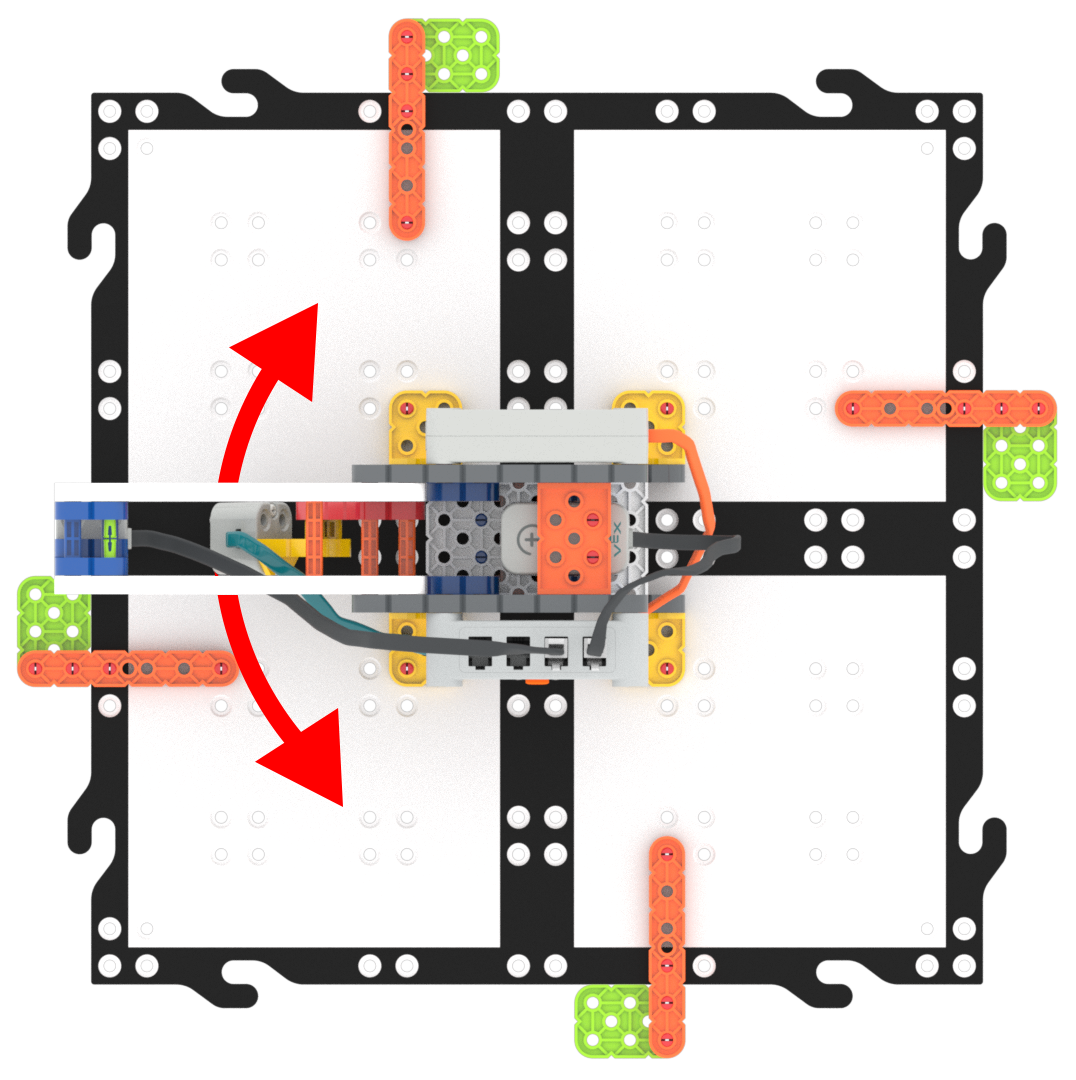
Kód Robotické rameno (1 osa): Robotické rameno s motory a Mozkem , které je řízeno pomocí VEXcode GO pro pohyb po 1 ose - ze strany na stranu. Tato sestava přidává oční senzor a používá elektromagnet ke zvedání disků.
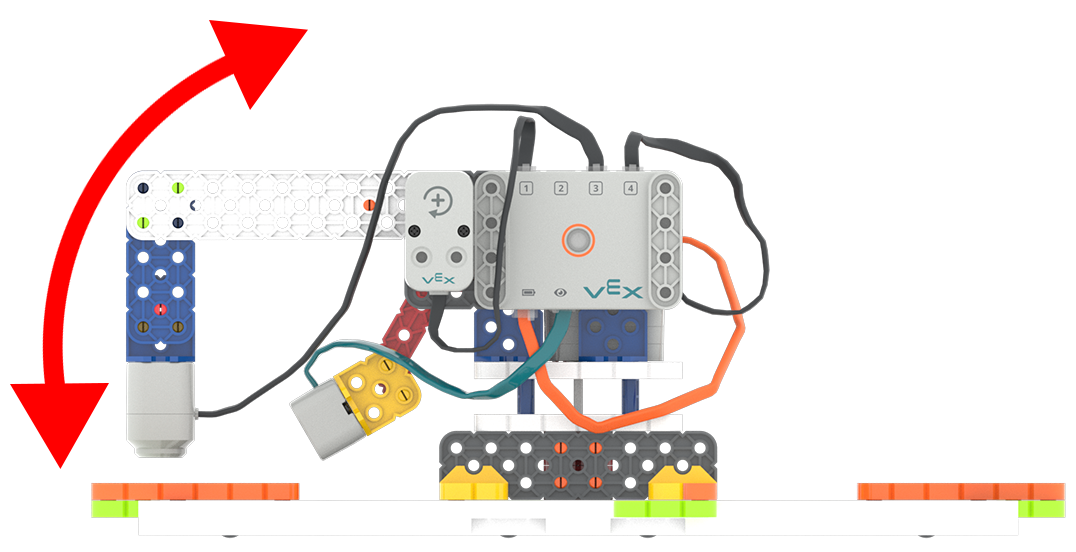
Kód Robotické rameno (2osé): Finální verze robotického ramene, která přidává motor pro zvedání ramene na druhé ose - nahoru a dolů. Tato sestava i nadále používá oční senzor a elektromagnet ke zvedání disků.
Robotické paže v reálném životě
Robotické rameno je typ mechanického ramene, obvykle programovatelného, které funguje podobně jako lidské rameno.

Robotická ramena, která se mohou pohybovat v několika různých směrech, lze naprogramovat k provádění mnoha různých úkolů. Mezi tyto úkoly patří svařování kovů, obrábění, lakování, montáž, vkládání věcí do jiných strojů a třídění předmětů. Tito roboti často vykonávají nudné, špinavé a nebezpečné práce, aby je lidé nemuseli dělat.

Robotická ramena mohou být vybavena jakýmkoli typem nástroje. Tyto nástroje se používají s přesností, správností, rychlostí a opakovatelností, které se lidem nemohou rovnat. V této laboratorní jednotce STEM si studenti vybaví své robotické rameno magnetem a později elektromagnetem.
Tato robotická ramena mohou využívat senzory a informace ze senzorů k rozhodování o svém chování. V pozdějších laboratořích této jednotky se studenti seznámí s tím, jak funguje oční senzor a jak jej lze použít k ovládání pohybu robotického ramene.
Průmyslové roboty a automatizace jsou důležitou součástí výroby většiny produktů vyráběných v dnešním světě. V rámci rozšiřující aktivity nechte studenty prozkoumat průmyslové roboty a sestavit seznam produktů, které používají a které byly vyrobeny nebo roztříděny robotickým ramenem.
Vysvětlení laboratorních řešení
V laboratořích 3-5 studenti použijí VEXcode GO k vytvoření projektů, které řídí pohyb robotického ramene pomocí elektromagnetu, očního senzoru, motorů a mozku. Cvičení 3 představuje základní programování pro napájení elektromagnetu a otáčení robotického ramene. Cvičení 4 a 5 zkoumají, jak ovládat robotické rameno pomocí rozhodování v kódu, a zkoumají tok projektu pomocí booleovských podmínek, podmíněných příkazů a bloku [Forever] pro pohyb disků a rozhodování na základě snímání barev.
Řešení 1. části 1. části cvičení 3
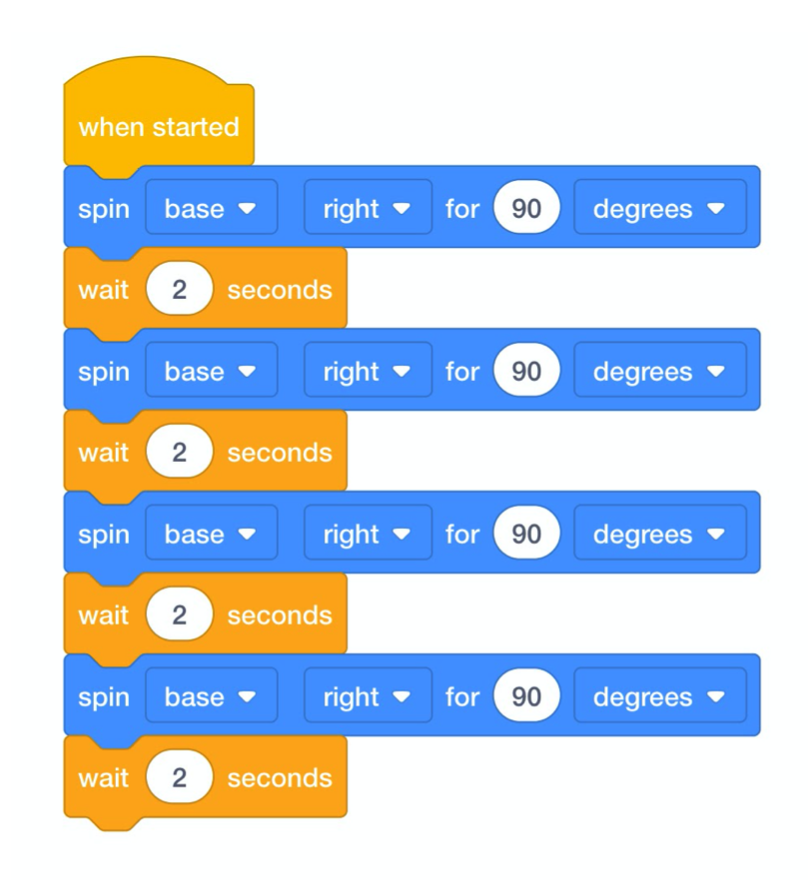
Tento projekt vytvoří robotické rameno:
- Otočte robotické rameno doprava (o 90 stupňů).
- Pak počkejte 2 sekundy.
- Poté tento postup opakujte ještě třikrát, abyste robotické rameno úplně otočili a vrátili ho do výchozí polohy.
Řešení 2. části 2. části cvičení 3
Tento projekt vytvoří robotické rameno:
- Zapněte elektromagnet, aby se disk zvedl.
- Pak otočte robotické rameno doprava, abyste disk posunuli.
- Vložte disk na nové místo.
- Vraťte robotické rameno do výchozí polohy.
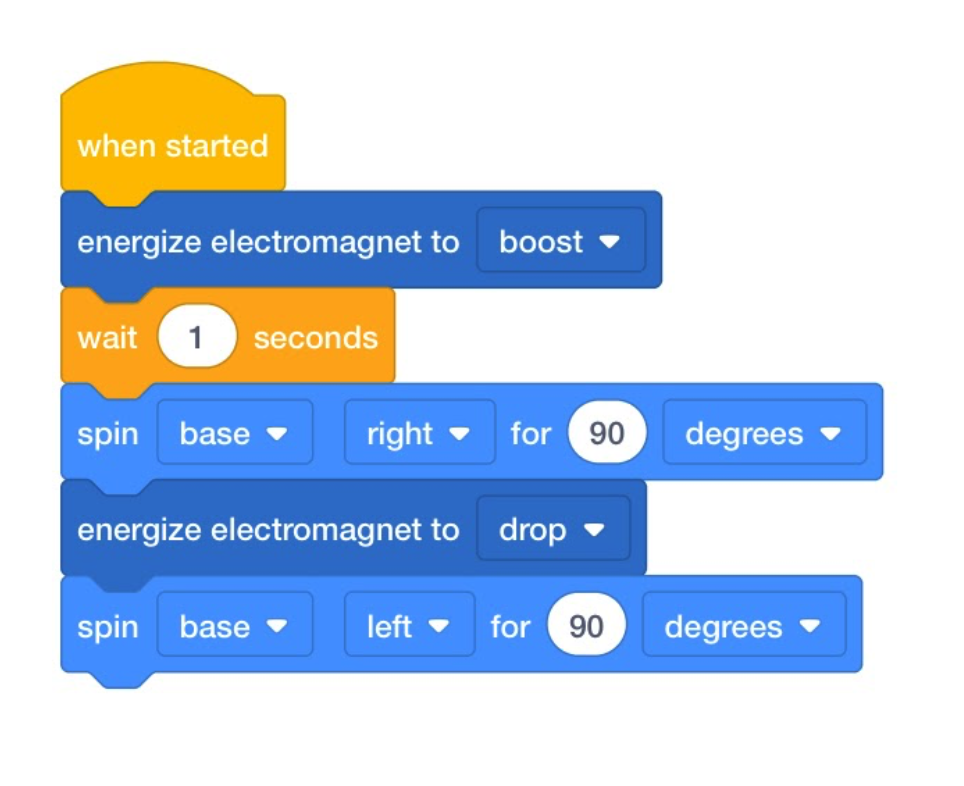
Poznámka: V tomto scénáři disk narazí na oranžový paprsek na dlaždici a měl by se oddělit od magnetu. Toto je zamýšlené chování.
Řešení 1. části hry pro laboratoř 4
Tento projekt vytvoří robotické rameno:
- Počkejte, dokud oční senzor nenajde objekt.
- Poté zapněte elektromagnet, aby disk zvedl.
- Pak otočte robotické rameno doprava, abyste disk posunuli
- Vložte disk na nové místo.
- Vraťte robotické rameno do výchozí polohy.
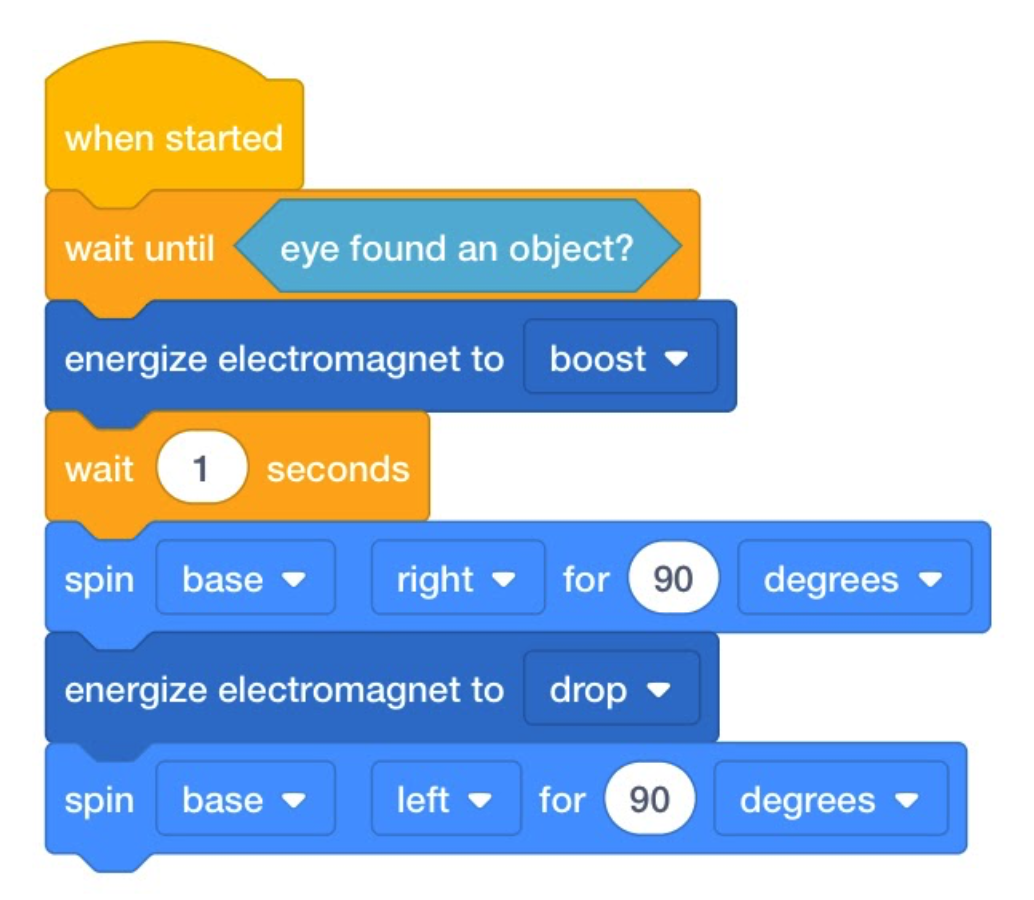
Poznámka: V tomto scénáři disk narazí na oranžový paprsek na dlaždici a měl by se oddělit od magnetu. Toto je zamýšlené chování.
Řešení 2. části 2. části hry pro laboratoř 4
Tento projekt vytvoří robotické rameno:
- Počkejte, dokud senzor oka nenajde objekt.
- Poté zapněte elektromagnet, aby disk zvedl.
- Poté posuňte robotické rameno NAHORU, abyste zvedli disk.
- Pak otočte robotické rameno doprava, abyste disk posunuli.
- Poté posuňte robotické rameno DOLŮ, aby mohlo spustit disk.
- Vraťte robotické rameno do výchozí polohy.
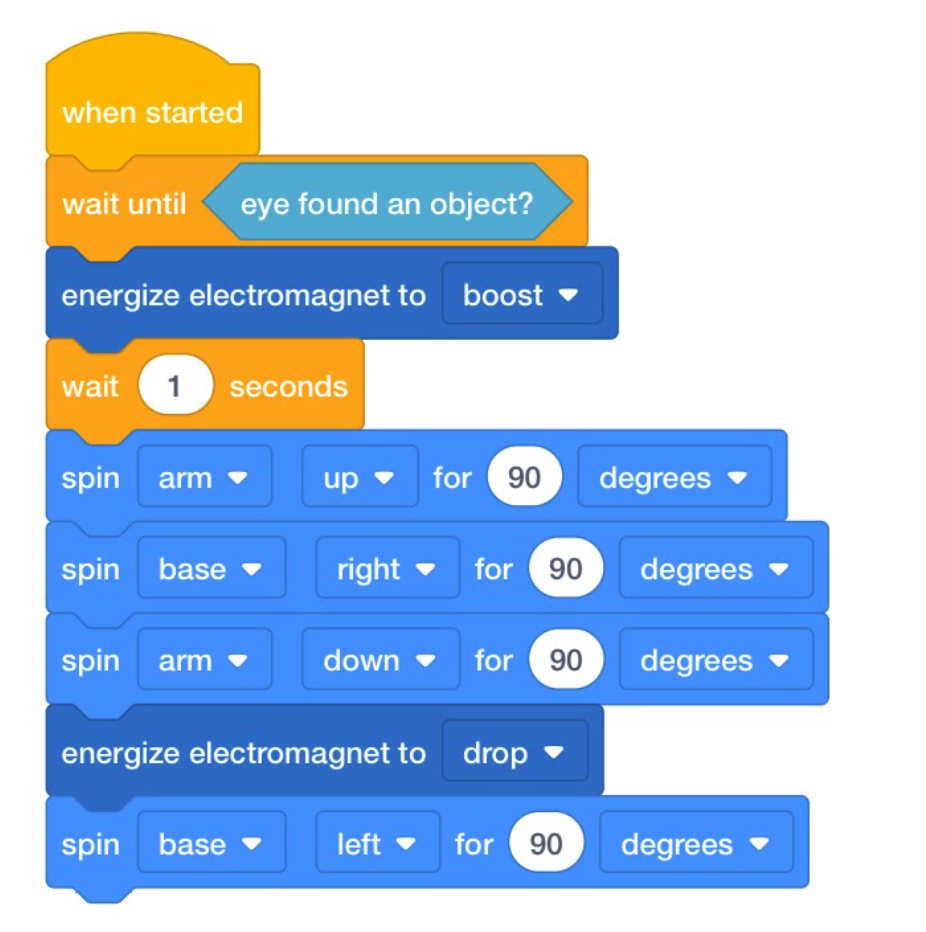
Tyto projekty používají blok [Wait until] k řízení průběhu projektu, který čeká, dokud oční senzor nezaznamená objekt, než aktivuje elektromagnet. Pokud by nečekal na oční senzor, elektromagnet by se pohnul, aniž by disk zvedl. To umožňuje robotovi činit rozhodnutí na základě dat, která přijímá ze svého očního senzoru.
Řešení 1. části 1. části cvičení 5
Tento projekt vytvoří robotické rameno:
- Počkejte, dokud oční senzor nenajde objekt.
- Pokud je objekt zelený, bude pohybovat diskem stejně jako v cvičení 4.
- Robotické rameno bude neustále kontrolovat zelený objekt kvůli bloku [Forever] kolem zásobníku.
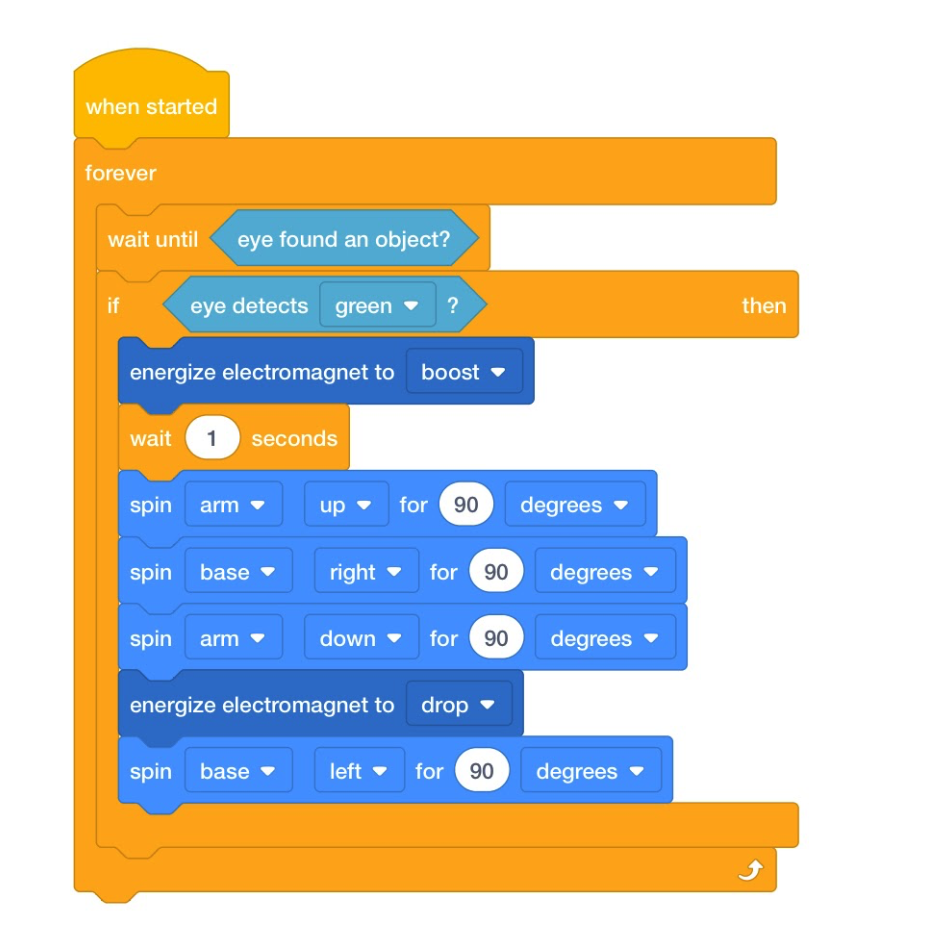
Řešení 2. části 2. části cvičení 5
Tento projekt vytvoří robotické rameno:
- Počkejte, dokud oční senzor nenajde objekt.
- Pokud je objekt zelený, robotické rameno zvedne disk a otočí ho o 90 stupňů doprava, poté disk spustí a vrátí se do výchozí polohy.
- Pokud je objekt červený, robotické rameno zvedne disk a otočí ho o 180 stupňů doprava, poté disk upustí a vrátí se do výchozí polohy.
- Pokud je objekt modrý, robotické rameno zvedne disk a otočí ho o 90 stupňů doleva, poté disk upustí a vrátí se do výchozí polohy.
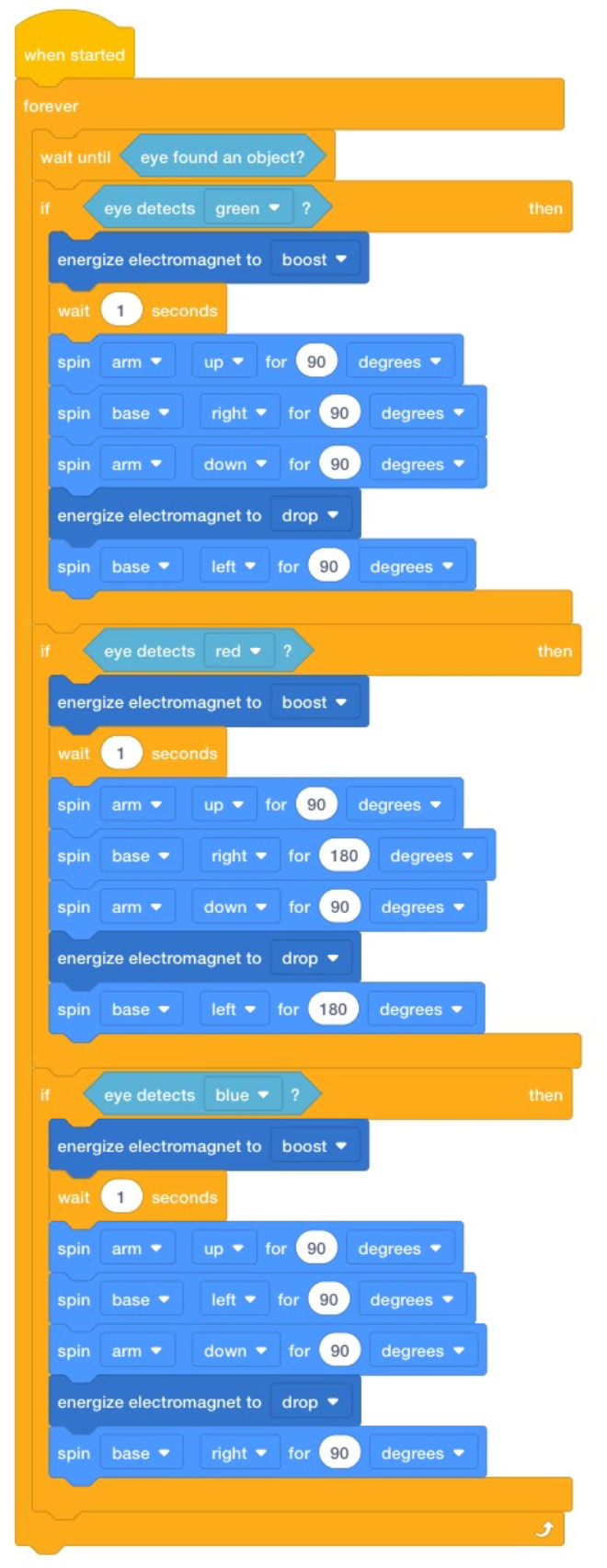
Tyto projekty přidávají podmíněné příkazy, které robotovi umožňují opakovaně se rozhodovat na základě dat z očního senzoru. Opakují se, protože blok [Forever] se používá k tomu, aby robot neustále kontroloval přítomnost objektů.
Pro více informací o jednotlivých blocích použitých v těchto projektech použijte funkci Nápověda ve VEXcode GO. Více informací o tvarech bloků a jejich významech naleznete v článku Tvary a významy bloků v knihovně VEX. Pokud byste se chtěli dozvědět více o konceptech informatiky, které stojí za těmito kódovými řešeními, mohl by být pro vás kurz certifikace pro pedagogy základů informatiky
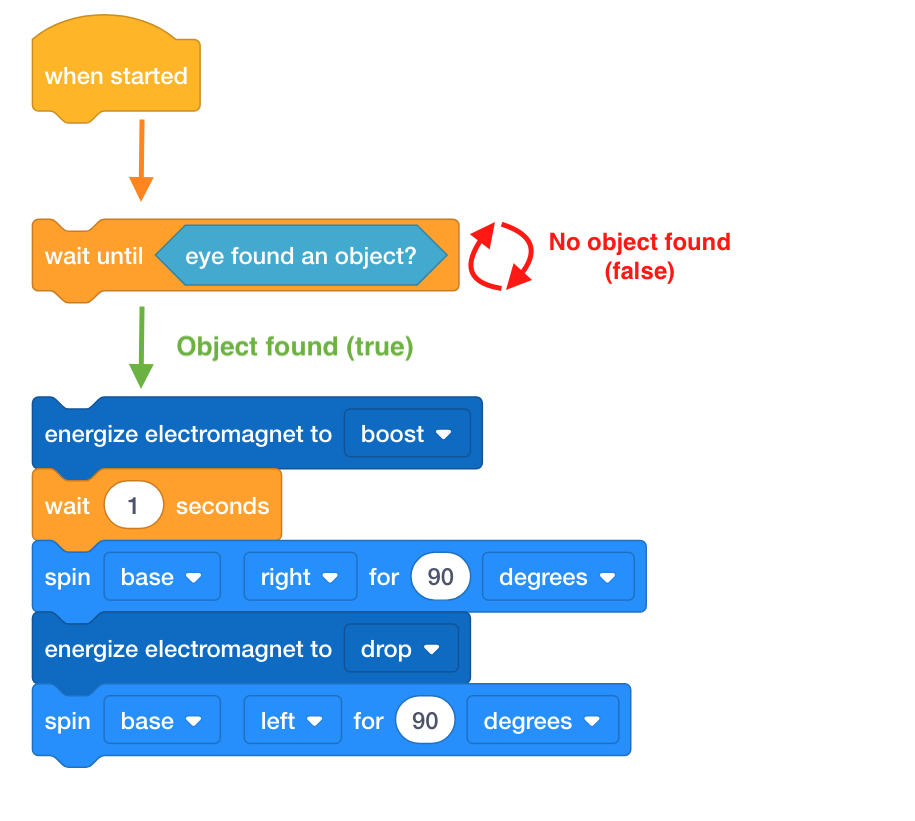
Co je to Project Flow?
Project Flow popisuje pořadí, ve kterém jsou bloky prováděny v projektu. Všechny projekty plynou shora dolů, počínaje blokem klobouku [When started]. V jednom okamžiku je proveden pouze jeden blok a jakmile blok dokončí své akce nebo chování, projekt se automaticky přesune na další blok. Určité ovládací bloky (oranžové barvy) mohou upravit tok projektu na základě hodnoty podmínky nebo parametru. V tomto projektu například blok [Počkejte, až] zastaví tok projektu a „počkejte, až“ bude splněna podmínka (v tomto případě našel oční senzor objekt). Jakmile je tato podmínka splněna (oční senzor našel objekt, takže blok hlásí hodnotu TRUE), blok [Wait until] skončí a přesune se k dalšímu bloku v projektu.
VEX GO Pieces
Podrobnější informace o dílech a elektronice sady VEX GO použité v jednotce robotického ramene naleznete v článku dílů v sadě VEX GO v knihovně VEX.