
خلفية
في هذه الوحدة، سوف يستكشف الطلاب تطور الذراع الروبوتية من اليدوية إلى الآلية إلى الآلية الآلية، وكيف يمكن التحكم بها لإنجاز مهمة يدويًا، باستخدام المفاتيح، واستخدام التعليمات البرمجية. طوال الوحدة، سيكون لدى الطلاب الفرصة للتفكير ومناقشة المفاهيم المتعلقة بالميكانيكا، والأتمتة، وتدفق المشروع، والعبارات الشرطية، وإقامة اتصالات بين العمليات البشرية والروبوتية.
المميزات والإضافات في هذه الوحدة
هناك أربعة إصدارات في هذه الوحدة:
- ذراع روبوت يدوية
- ذراع روبوتية آلية
- ذراع روبوتية متحركة على محور واحد
- ذراع روبوتية متحركة على محورين
يمكن إكمال هذه الإصدارات بشكل فردي (تم بناؤها من الصفر لكل مختبر)، أو كإصدار انتقالي (يتم تعديل الإصدار الأول في المختبرات اللاحقة). تتضمن الميزات الرئيسية لكل بناء ما يلي:
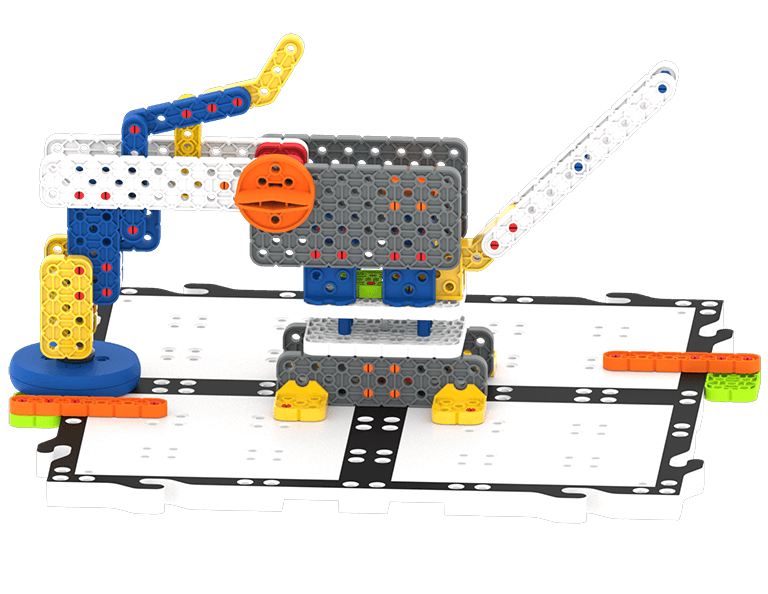
ذراع الروبوت: ذراع روبوتية يتم تشغيلها يدويًا ويتم التحكم فيها عن طريق تحريك الشعاع الأبيض الطويل لتحويله من جانب إلى آخر، أو المقابض البرتقالية لتحريك الذراع لأعلى ولأسفل. يستخدم هذا البناء مغناطيسًا شماليًا جنوبيًا لرفع الأقراص.
ذراع الروبوت الآلية: ذراع آلية تستخدم المحركات و مفاتيح للتحرك. يتم توصيل المحركات والمفاتيح بالبطارية. يستخدم هذا البناء أيضًا مغناطيسًا شماليًا جنوبيًا لرفع الأقراص.
- ملاحظة: يتطلب هذا البناء مجموعتين GO لإكمال ذراع روبوتية واحدة.
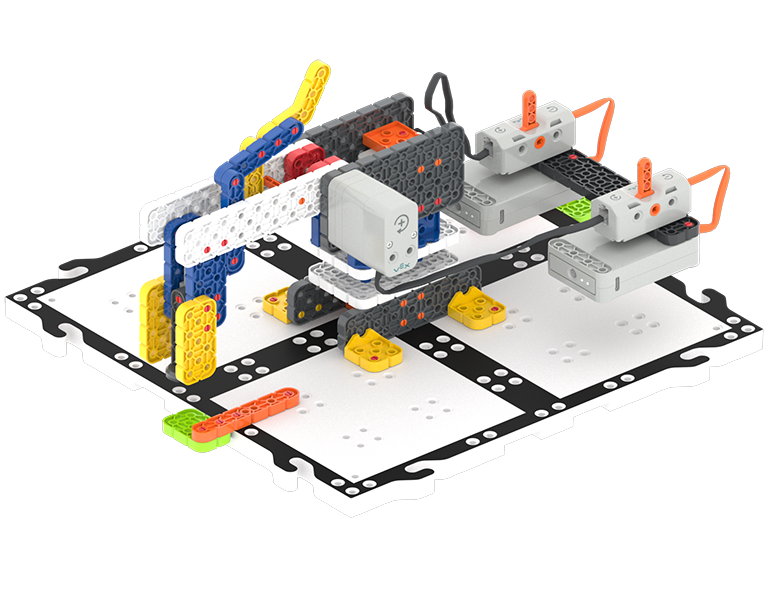
ذراع روبوت الكود (محور واحد): ذراع آلية مزودة بمحركات و مخ التي يتم التحكم فيها باستخدام VEXcode GO للمضي قدمًا 1 المحور - جنبًا إلى جنب. يضيف هذا البناء مستشعر العين, ويستخدم مغناطيس كهربائي لرفع الأقراص.
كود ذراع الروبوت (2 محور): تصميم الذراع الروبوتية النهائي الذي يضيف محركًا لرفع الذراع على محور ثانٍ - لأعلى ولأسفل. يستمر هذا البناء في استخدام مستشعر العين والمغناطيس الكهربائي لرفع الأقراص.
الأذرع الروبوتية في الحياة الواقعية
الذراع الروبوتية هي نوع من الأذرع الميكانيكية، وعادة ما تكون قابلة للبرمجة، وتعمل بشكل مشابه للذراع البشرية.

يمكن برمجة الأذرع الروبوتية، التي يمكنها التحرك في عدة اتجاهات مختلفة، للقيام بالعديد من المهام المختلفة. تتضمن بعض هذه المهام لحام المعادن، والتشغيل الآلي، والطلاء، وتجميع الأشياء، ووضع الأشياء في آلات أخرى، وفرز الأشياء. غالبًا ما تقوم هذه الروبوتات بأعمال مملة وقذرة وخطيرة حتى لا يضطر البشر إلى القيام بها.

يمكن تجهيز الأذرع الروبوتية بأي نوع من الأدوات. يتم استخدام هذه الأدوات بدقة وسرعة وتكرار لا يمكن للبشر أن يضاهوها. في وحدة مختبر STEM هذه، سيقوم الطلاب بتجهيز ذراع الروبوت الخاصة بهم بمغناطيس، وفي وقت لاحق، بمغناطيس كهربائي.
يمكن لهذه الأذرع الروبوتية استخدام أجهزة الاستشعار، والمعلومات من أجهزة الاستشعار، لاتخاذ قرارات بشأن سلوكياتها. في المختبرات اللاحقة للوحدة، سوف يستكشف الطلاب كيفية عمل مستشعر العين وكيف يمكن استخدامه للتحكم في حركة ذراع الروبوت.
تشكل الروبوتات الصناعية والأتمتة جزءًا مهمًا من تصنيع معظم المنتجات المنتجة في عالم اليوم. بالنسبة للنشاط التوسعي، اطلب من الطلاب البحث عن الروبوتات الصناعية وإعداد قائمة بالمنتجات التي يستخدمونها والتي تم تصنيعها أو فرزها بواسطة ذراع روبوتية.
شرح حلول المختبر
في المختبرات 3-5، سيستخدم الطلاب VEXcode GO لإنشاء مشاريع تتحكم في حركة ذراع الروبوت باستخدام المغناطيس الكهربائي ومستشعر العين والمحركات والدماغ. يقدم المختبر 3 البرمجة الأساسية لتشغيل المغناطيس الكهربائي وتحريك ذراع الروبوت. يستكشف المختبران 4 و5 كيفية التحكم في الذراع الروبوتية من خلال اتخاذ القرار في الكود، ويستكشفان سير المشروع باستخدام الشروط المنطقية والعبارات الشرطية وكتلة [Forever] لتحريك الأقراص واتخاذ القرارات بناءً على استشعار اللون.
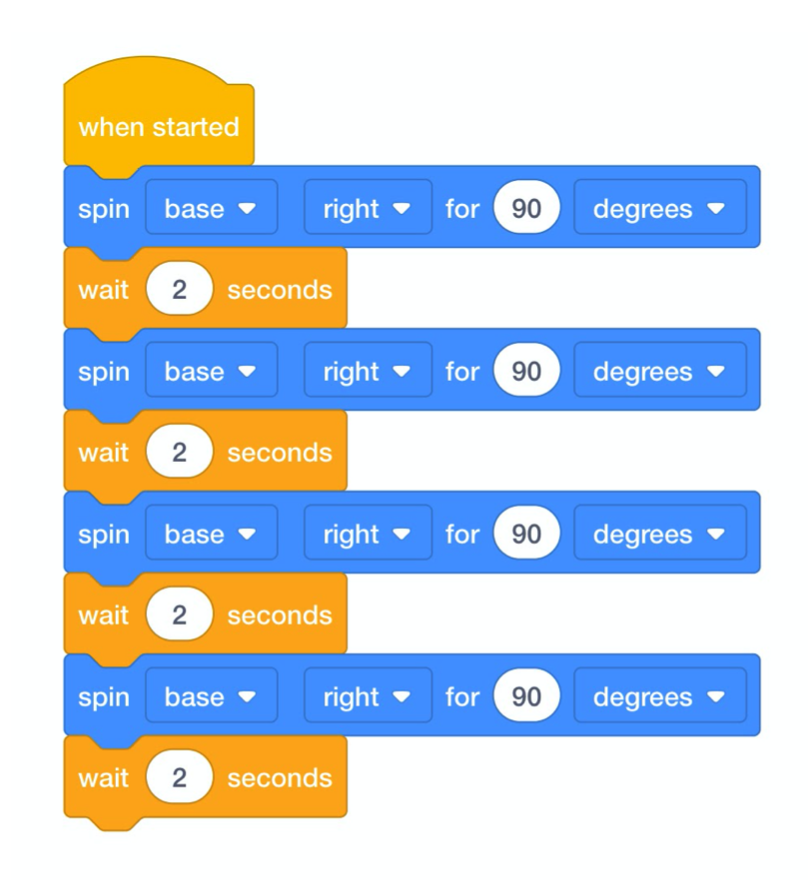
حل لعبة مختبر 3 الجزء الأول
هذا المشروع سوف يجعل الذراع الروبوتية:
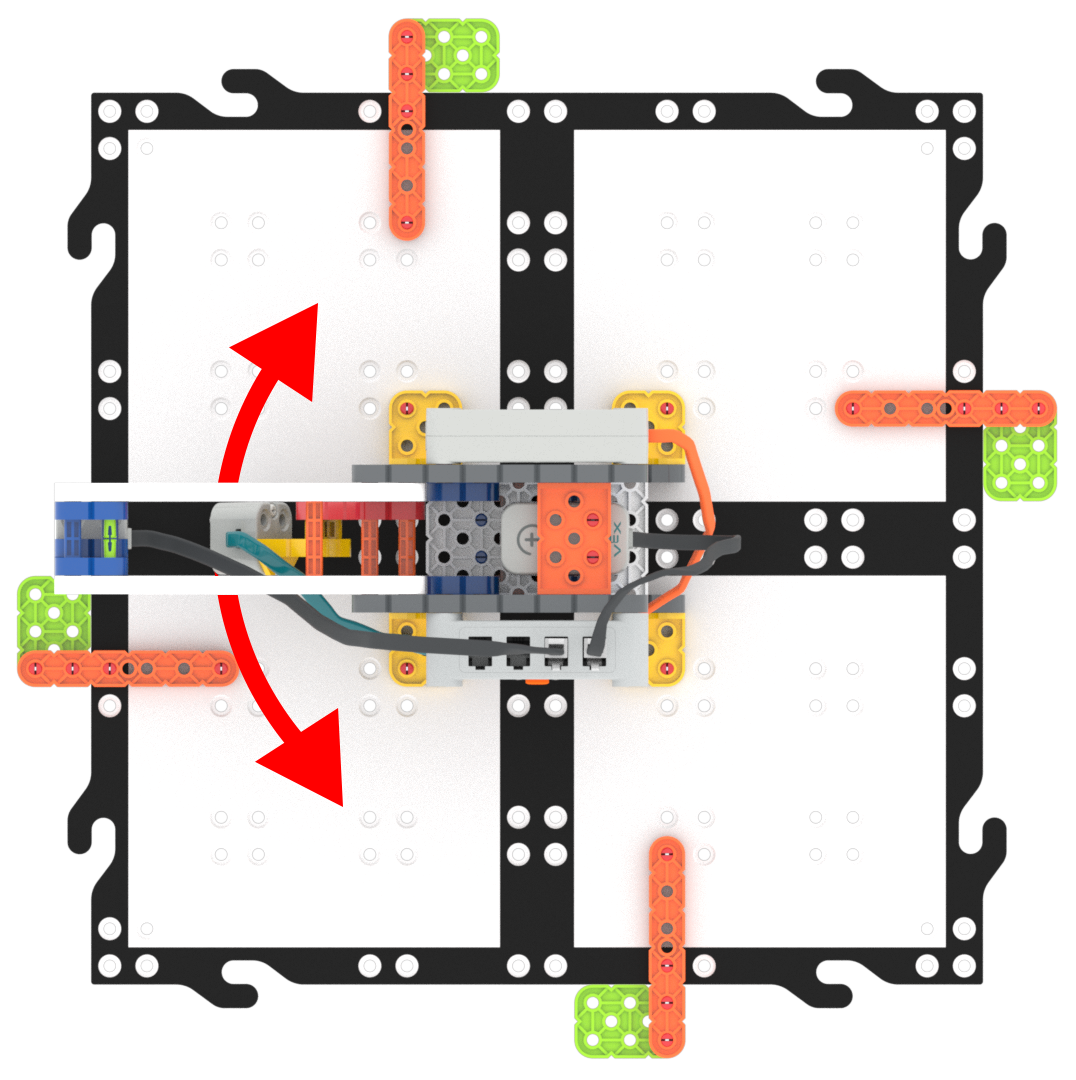
- قم بتدوير ذراع الروبوت إلى اليمين (بنسبة 90 درجة).
- ثم انتظر لمدة ثانيتين.
- بعد ذلك، كرر هذه العملية 3 مرات أخرى، لتدوير ذراع الروبوت بالكامل وإعادته إلى موضع البداية.
حل لعبة مختبر 3 الجزء الثاني
هذا المشروع سوف يجعل الذراع الروبوتية:
- قم بتنشيط المغناطيس الكهربائي لالتقاط القرص.
- بعد ذلك، قم بتدوير ذراع الروبوت إلى اليمين لتحريك القرص.
- قم بإسقاط القرص في مكان جديد.
- قم بإرجاع ذراع الروبوت إلى موضع البداية.
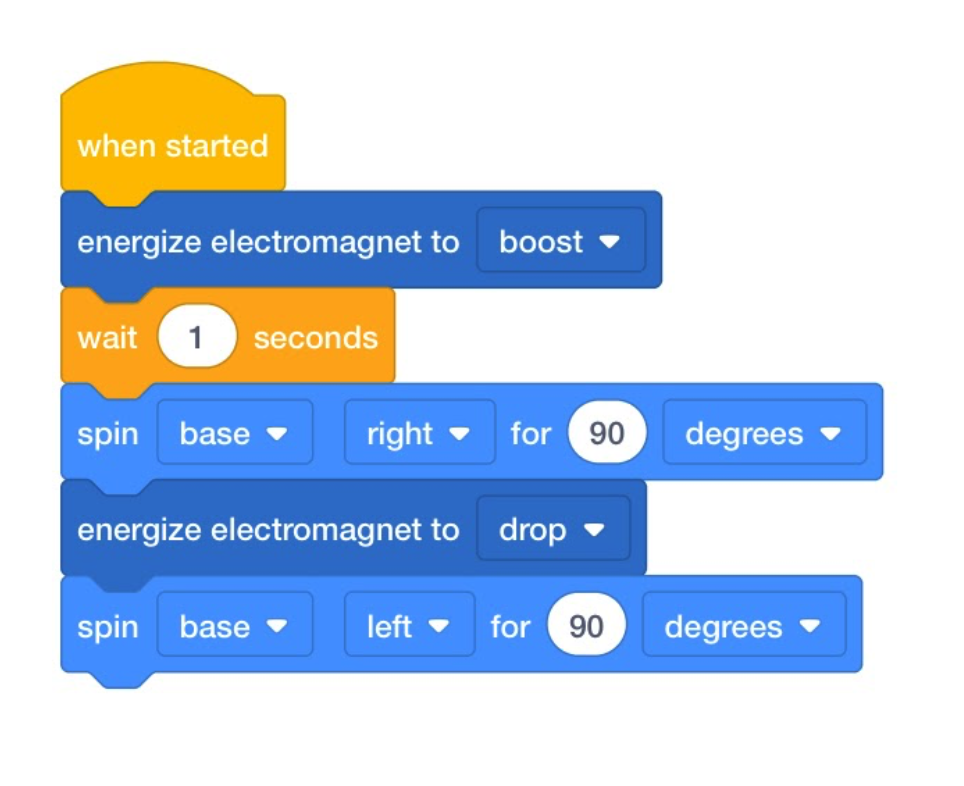
ملاحظة: هذا السيناريو، سوف يصطدم القرص بالشعاع البرتقالي الموجود على البلاط، ويجب أن ينفصل عن المغناطيس. هذا هو السلوك المقصود.
حل لعبة مختبر 4 الجزء الأول
هذا المشروع سوف يجعل الذراع الروبوتية:
- انتظر حتى يجد مستشعر العين جسمًا ما.
- بعد ذلك، قم بتنشيط المغناطيس الكهربائي لالتقاط القرص.
- ثم قم بتدوير ذراع الروبوت إلى اليمين لتحريك القرص.
- قم بإسقاط القرص في مكان جديد.
- قم بإرجاع ذراع الروبوت إلى موضع البداية.
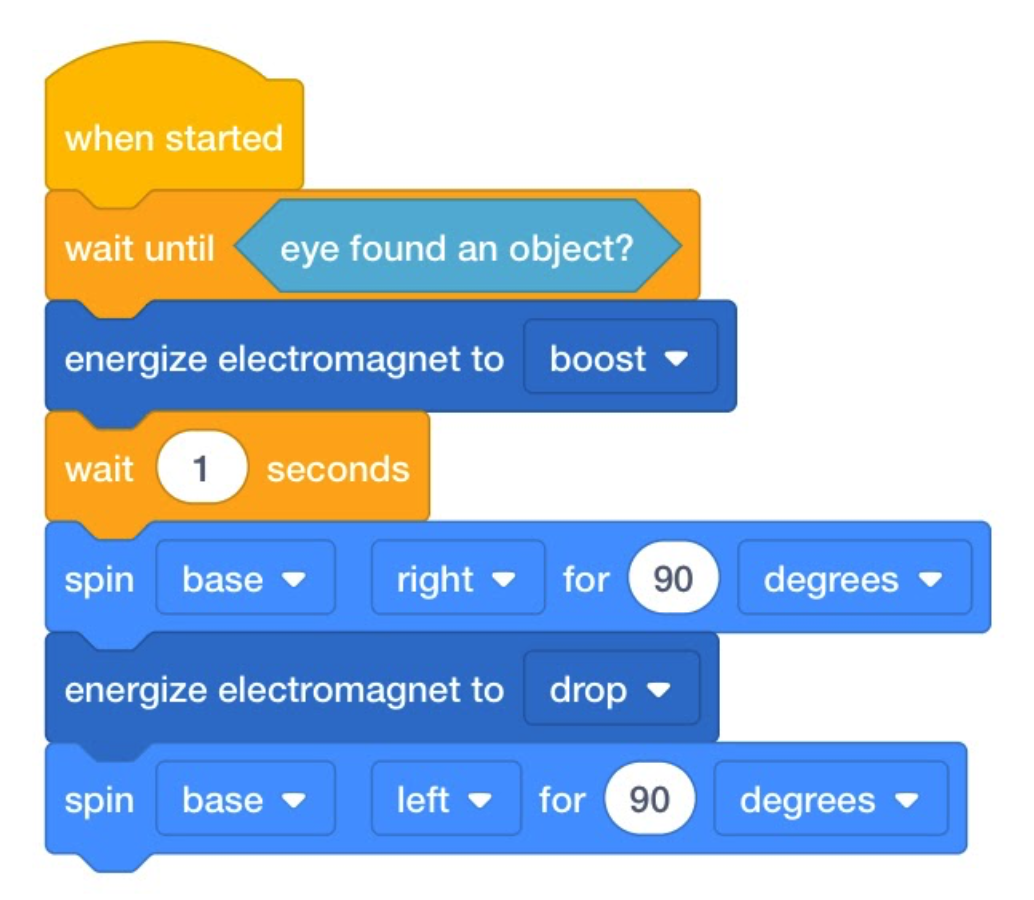
ملاحظة: هذا السيناريو، سوف يصطدم القرص بالشعاع البرتقالي الموجود على البلاط، ويجب أن ينفصل عن المغناطيس. هذا هو السلوك المقصود.
حل لعبة مختبر 4 الجزء الثاني
هذا المشروع سوف يجعل الذراع الروبوتية:
- انتظر حتى يجد مستشعر العين جسمًا ما.
- بعد ذلك، قم بتنشيط المغناطيس الكهربائي لالتقاط القرص.
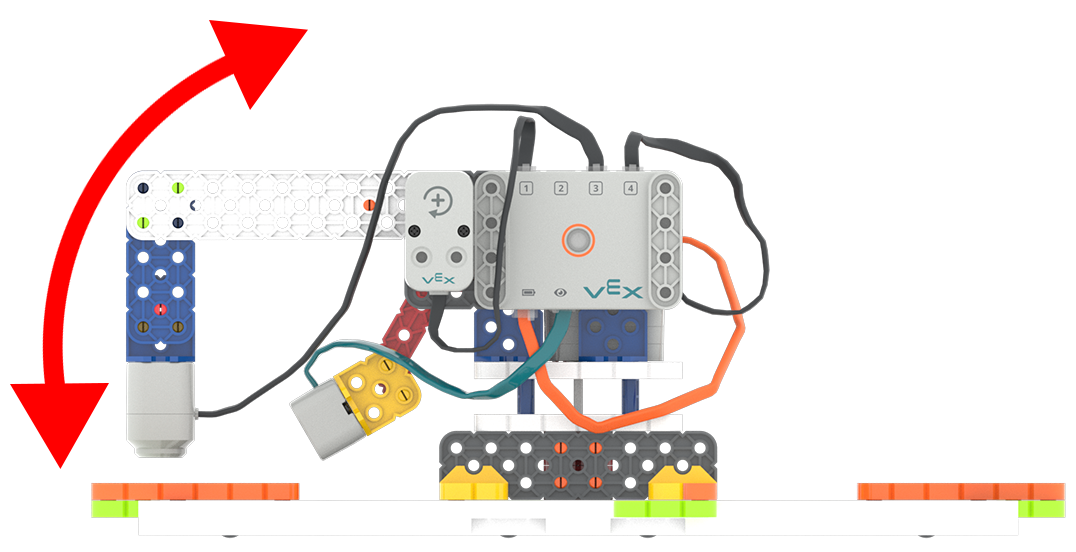
- ثم قم بتحريك ذراع الروبوت إلى الأعلى لرفع القرص.
- بعد ذلك، قم بتدوير ذراع الروبوت إلى اليمين لتحريك القرص.
- بعد ذلك، قم بتحريك ذراع الروبوت إلى الأسفل حتى يتمكن من إسقاط القرص.
- قم بإرجاع ذراع الروبوت إلى موضع البداية.
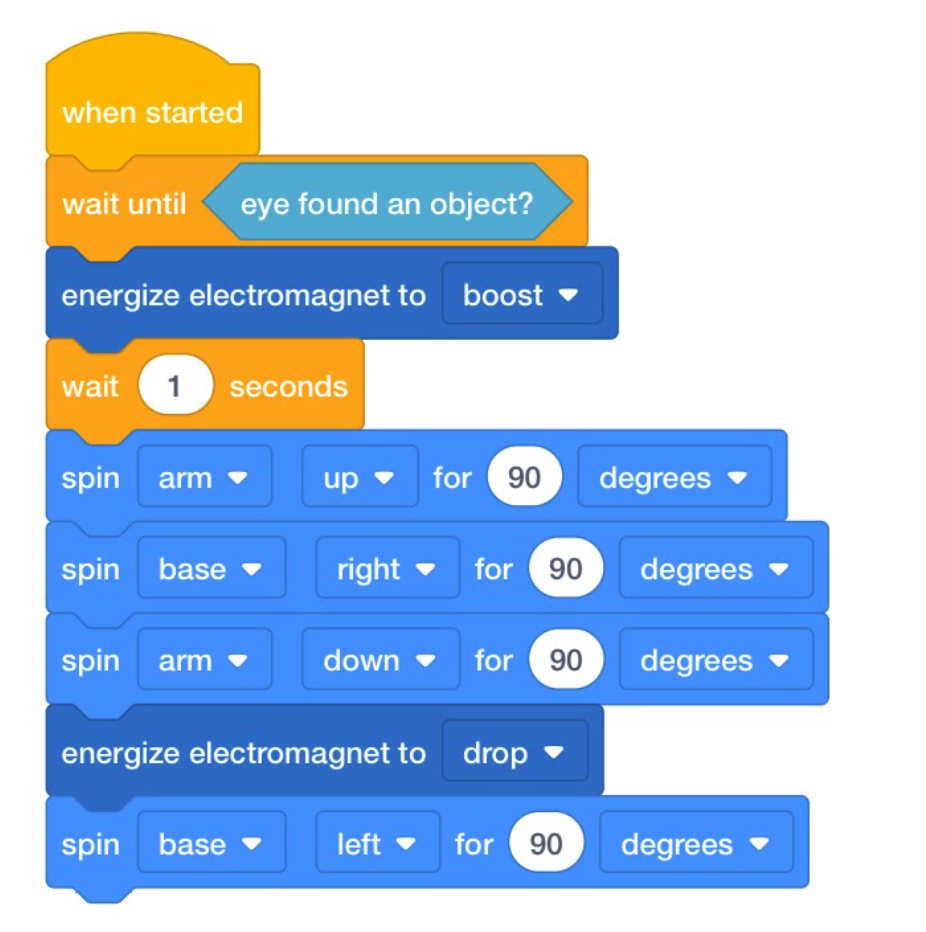
تستخدم هذه المشاريع كتلة [انتظر حتى] للتحكم في تدفق المشروع للانتظار حتى يكتشف مستشعر العين جسمًا قبل تنشيط المغناطيس الكهربائي. إذا لم ينتظر مستشعر العين، فإن المغناطيس الكهربائي سيتحرك دون التقاط القرص. يتيح هذا للروبوت اتخاذ قرار بناءً على البيانات التي يتلقاها من مستشعر العين الخاص به.
حل لعبة مختبر 5 الجزء الأول
هذا المشروع سوف يجعل الذراع الروبوتية:
- انتظر حتى يجد مستشعر العين جسمًا ما.
- إذا كان الكائن باللون الأخضر، فسوف يحرك القرص كما فعل في المختبر 4.
- سوف يقوم الذراع الروبوتي بالتحقق بشكل مستمر من وجود جسم أخضر بسبب كتلة [إلى الأبد] الموجودة حول المكدس.
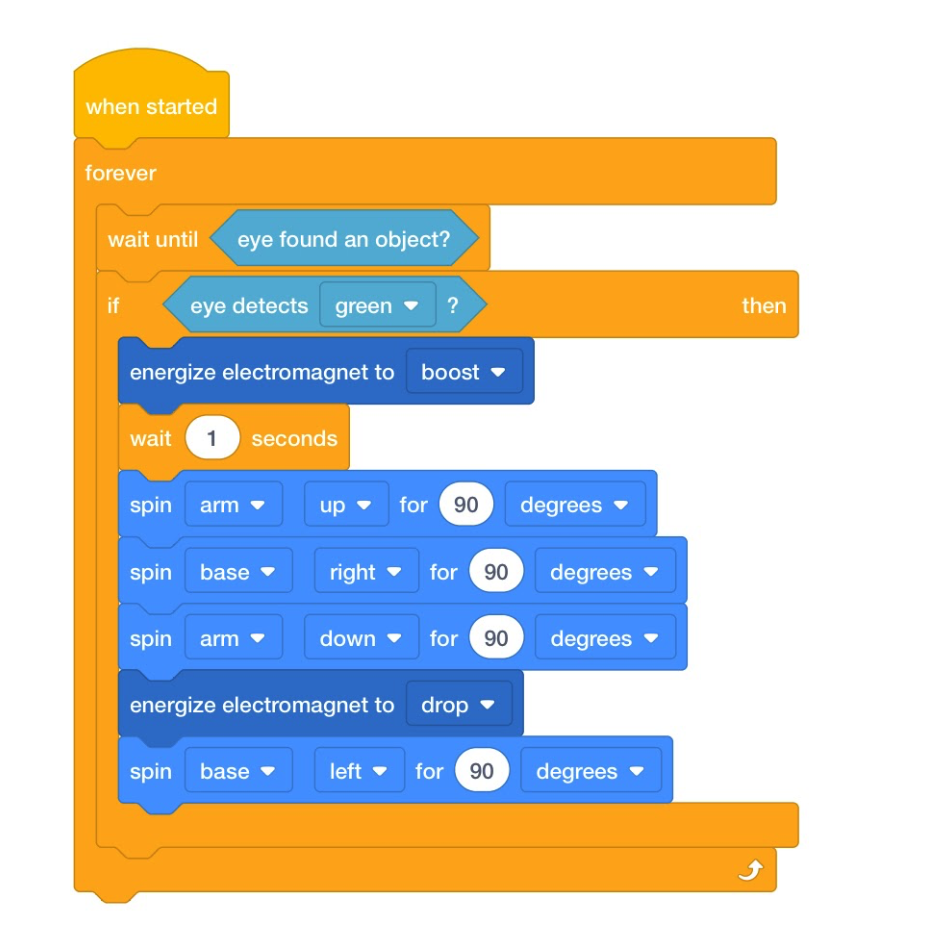
حل لعبة مختبر 5 الجزء الثاني
هذا المشروع سوف يجعل الذراع الروبوتية:
- انتظر حتى يجد مستشعر العين جسمًا ما.
- إذا كان الجسم أخضر، فسوف يرفع ذراع الروبوت القرص ويحركه إلى اليمين 90 درجة، ثم يسقط القرص ويعود إلى موضع البداية.
- إذا كان الجسم أحمر، فسوف يرفع ذراع الروبوت القرص ويحركه إلى اليمين 180 درجة، ثم يسقط القرص ويعود إلى موضع البداية.
- إذا كان الجسم أزرق اللون، فسوف يرفع ذراع الروبوت القرص وينقله إلى اليسار بمقدار 90 درجة، ثم يسقط القرص ويعود إلى موضع البداية.
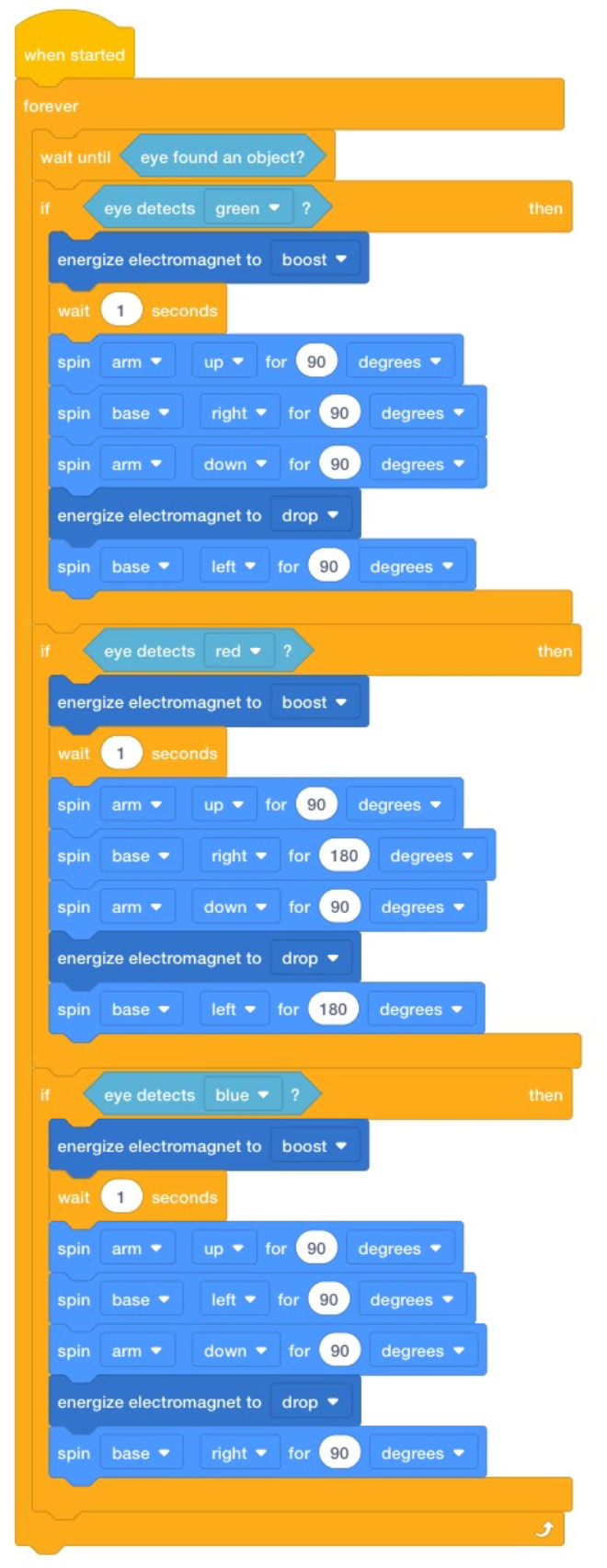
تضيف هذه المشاريع عبارات شرطية لتمكين الروبوت من اتخاذ قرارات متكررة بناءً على البيانات الواردة من مستشعر العين. يتم تكرارها لأن كتلة [إلى الأبد] تستخدم لإخبار الروبوت بالتحقق المستمر من الكائنات.
لمزيد من المعلومات حول الكتل الفردية المستخدمة في هذه المشاريع، استخدم يساعد ميزة في VEXcode GO. لمزيد من المعلومات حول أشكال الكتل ومعانيها, انظر Block الأشكال والمعاني مقالة في مكتبة VEX. إذا كنت ترغب في معرفة المزيد عن مفاهيم علوم الكمبيوتر وراء حلول التعليمات البرمجية هذه، أساسيات علوم الكمبيوتر دورة اعتماد المعلم قد يكون لك.
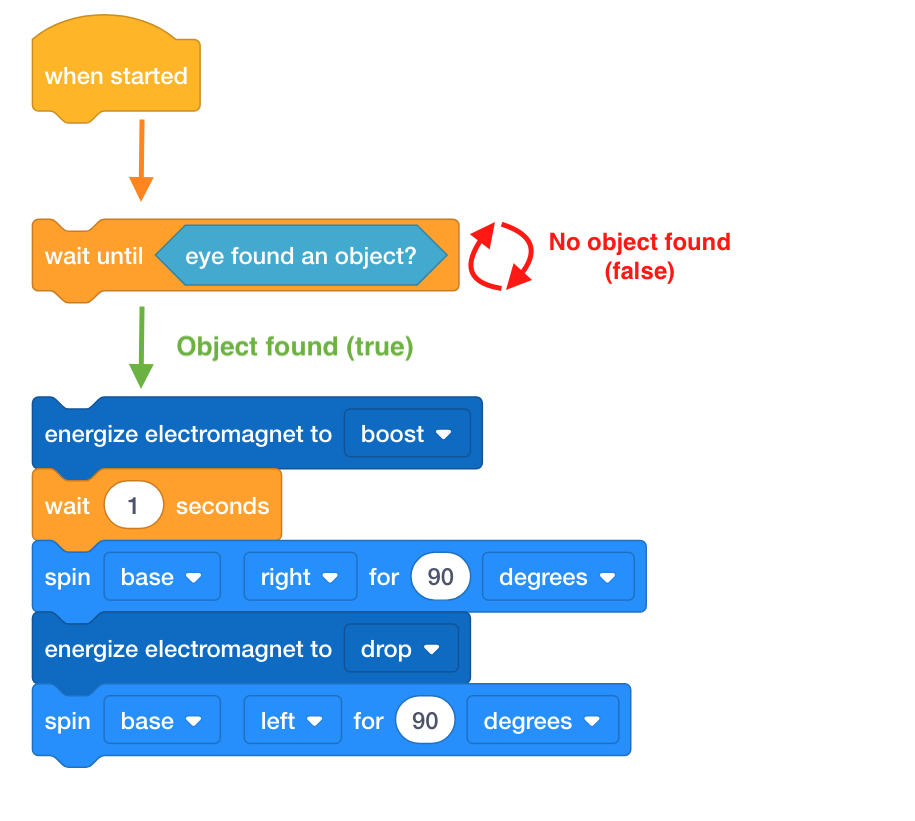
ما هو تدفق المشروع؟
يصف تدفق المشروع الترتيب الذي يتم به تنفيذ الكتل في مشروع ما. تتدفق جميع المشاريع من الأعلى إلى الأسفل، بدءًا من كتلة القبعة [عند البدء]. يتم تنفيذ كتلة واحدة فقط في كل مرة، وبمجرد أن تكمل الكتلة إجراءاتها أو سلوكياتها، ينتقل المشروع إلى الكتلة التالية تلقائيًا. يمكن لبعض كتل التحكم (البرتقالية اللون) تعديل تدفق المشروع، استنادًا إلى شرط أو قيمة معلمة. على سبيل المثال، في هذا المشروع، سيوقف كتلة [انتظر حتى] تدفق المشروع، و"انتظر حتى" يتم استيفاء الشرط (في هذه الحالة، هل وجد مستشعر العين كائنًا). بمجرد استيفاء هذا الشرط (وجد مستشعر العين كائنًا، لذلك أبلغت الكتلة عن قيمة TRUE)، ستنتهي كتلة [انتظر حتى] وتنتقل إلى الكتلة التالية في المشروع.
قطع VEX GO
للحصول على معلومات أكثر تفصيلاً حول قطع VEX GO Kit والإلكترونيات المستخدمة في وحدة ذراع الروبوت, انظر قِطَع في مجموعة VEX GO مقالة مكتبة VEX.