
Exploration
Now you will create a VEXcode IQ project to have Fling launch two Balls into the High Goal using the Catapult Arm.
Break down the task
Before you begin coding, it is important to understand the behaviors needed for Fling to complete the task of launching two Balls into the High Goal from different distances by adjusting the tension of the Catapult Tension Motor.
Watch this video to break down the behaviors of the robot needed to complete the task.
Build the project
First, launch web-based VEXcode IQ. Then add blocks to build the project yourself, or open the example project below.
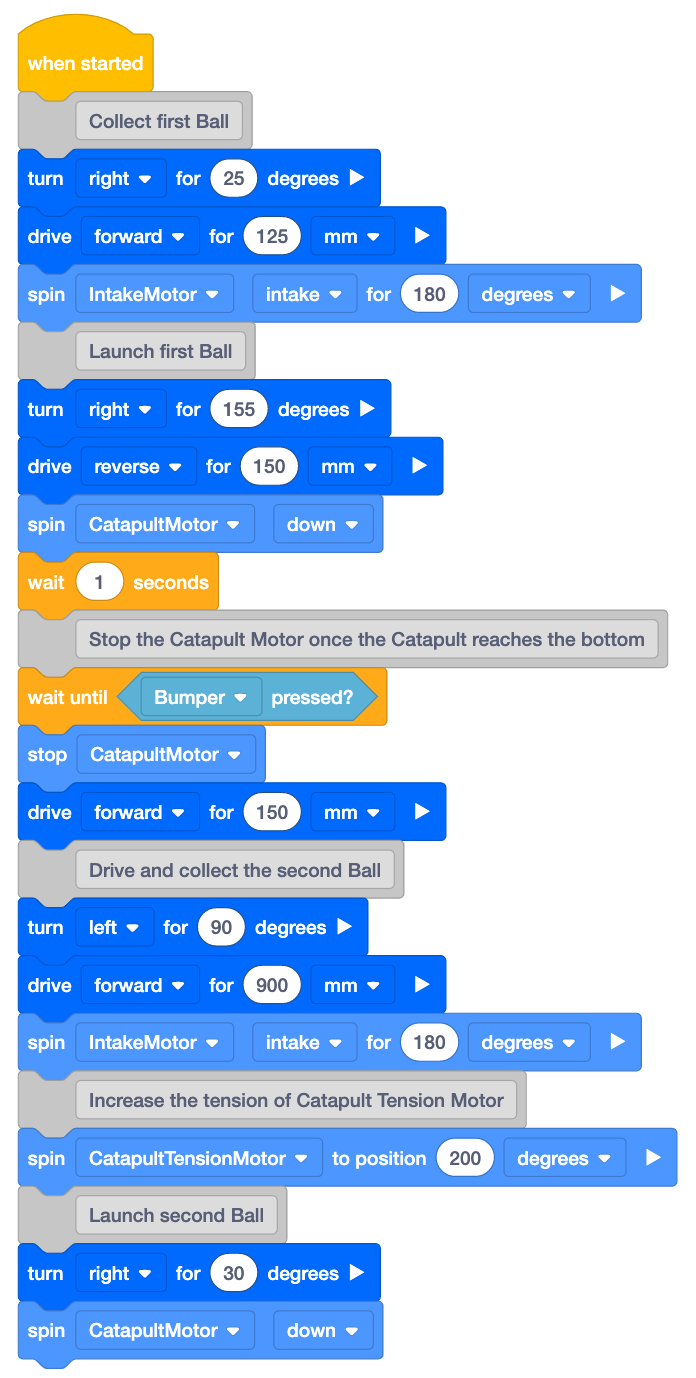
Build the project shown in this image.
Select the image to enlarge.
Or, open the 'Score Two in High Goal' example project.
View this article from the Knowledge Base for information on how to open an example project.

Test and observe the project
Now that you have built the project, you will test it and observe the behaviors of the robot as it moves and scores on the Field.
Watch this video to test the project and observe how the robot moves.
Select Next > to begin the mini-challenge.