
VEX AIR 비행 시뮬레이터에서 이륙, 착륙 및 기본 조종법을 연습하셨으니 이제 새로운 움직임인 기수 조정을 배울 준비가 되었습니다. 이번 수업에서는 VEX AIR 드론을 앞뒤로 기울여 기수를 정면으로 유지하면서 y축을 따라 이동하는 방법을 살펴보겠습니다. VEX AIR 드론 컨트롤러로 드론의 피치를 조절하는 방법을 배우고 비행 연습을 하게 됩니다.
이 영상을 시청하시면 더 자세한 내용을 알 수 있습니다.
- 오른쪽 조이스틱을 사용하여 앞뒤로 기울이는 방법.
- 프로펠러 속도 차이가 전진 및 후진 운동을 어떻게 생성하는가.
마우스 커서를 올려놓고 살펴보세요
피치 은 드론의 기수를 정면으로 유지하면서 드론을 앞뒤로 기울이는 제어 기능입니다. 드론은 한쪽 끝의 프로펠러가 반대쪽 끝의 프로펠러보다 더 빠르게 회전할 때 기수를 기울입니다. 프로펠러 속도의 변화는 드론을 기울여 y축을 따라 앞뒤로 움직이게 합니다.
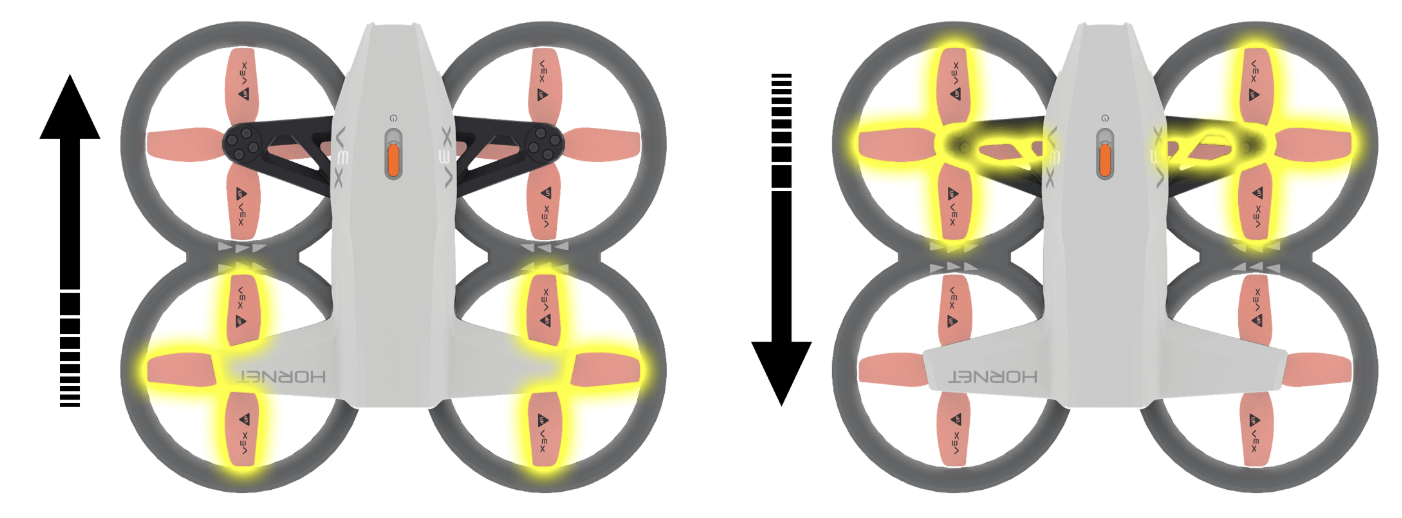
프로펠러가빠르게 회전하면 공기를 더 강하게 밀어 드론의 뒷부분을 들어 올리고 앞부분을 아래로 기울입니다. 이로 인해 드론은 들판을 가로질러 앞으로 나아갑니다.
프로펠러가빠르게 회전하면 드론은 뒤로 기울어지면서 그 방향으로 미끄러집니다.
드론은 피치 비행 중에도 기수가 앞쪽을 향하기 때문에 방향을 바꾸지 않고도 앞으로 나아가거나 뒤로 물러날 수 있습니다.
미션: 링을 통과하여 비행하기
드론 이해하기
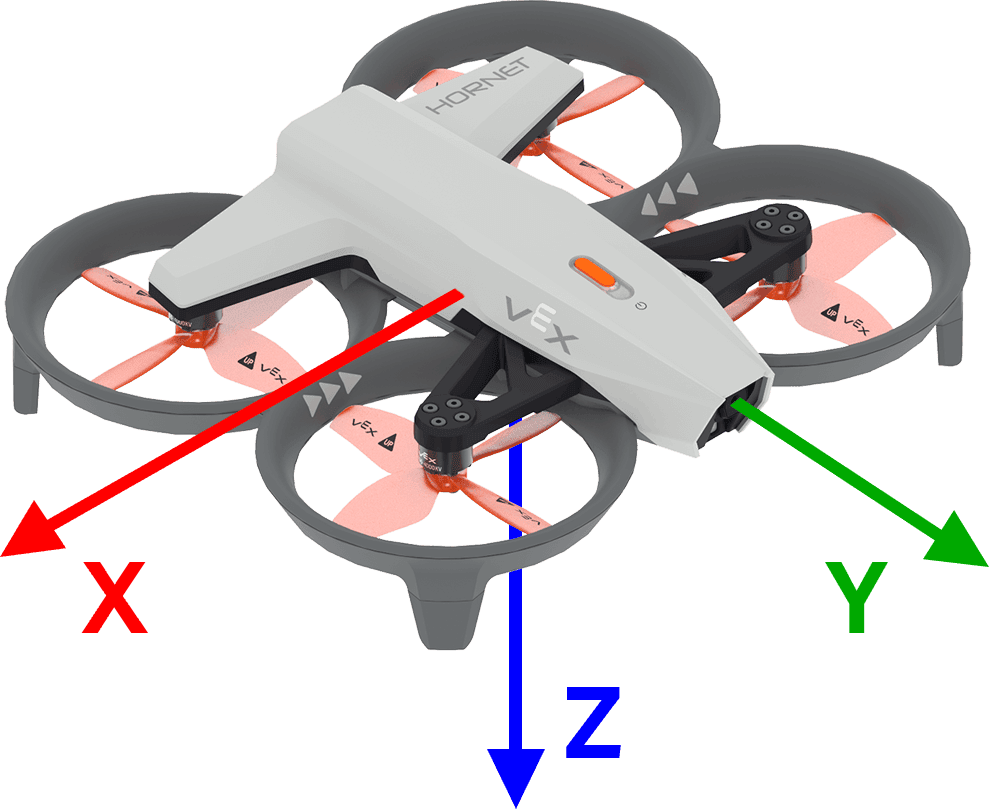
드론의 움직임을 설명할 때:
- z축은 드론의 스로틀을 나타냅니다. 이것은 위아래로 움직이는 것입니다.
- y축은 드론의 피치를 나타냅니다. 이것은 앞뒤로 움직이는 것입니다.
- x축은 드론의 롤(회전)을 나타냅니다. 이것은 좌우 움직임입니다. (4단원에서 구르기에 대해 배우게 됩니다.)
축을 이용하여 비행 경로를 설명하면 조종사가 정확한 지시를 내리는 데 도움이 됩니다. 예를 들어, 드론이 이륙하여 첫 번째 빨간색 링을 통과하며 앞으로 날아간다면, 우리는 드론이 z축을 따라 위로 이동한 다음 y축을 따라 앞으로 이동했다고 말할 수 있습니다.
각 축에서 움직임이 발생하는 위치를 이해하면 드론이 공간을 탐색하는 방식과 피치가 스로틀과 같은 다른 제어 장치와 어떻게 상호 작용하는지 더 명확하게 파악할 수 있습니다.
이해도 확인
다음 레슨으로 이동하려면 다음 > 선택하세요.