
Achtergrond
De Mars Rover: Landing Challenge Unit daagt je studenten uit om VEXcode 123-projecten te bouwen om een probleem op te lossen. Deze eenheid laat studenten kennismaken met het gebruik van de oogsensor aan de voorkant van de 123 Robot in een uitdaging, geïnspireerd door het proces dat wetenschappers gebruiken tijdens een poging om ruimtevaartuigen te landen, zoals de Mars 2020 Perseverance rover. Studenten zullen de 123 Robot coderen om een obstakel te detecteren en vervolgens een kleur oplichten om aan te geven dat er een obstakel op de landingsplaats is gevonden.
NASA's Mars 2020-missie
De Mars 2020-missie van NASA richt zich op wetenschappelijke doelen met hoge prioriteit voor Marsverkenning: leven, klimaat, geologie en mensen. Maar voordat de Perseverance-rover aan zijn missie kan beginnen om rots- en grondmonsters op het oppervlak te verzamelen, moet de rover veilig op de Rode Planeet landen.
Volgens NASA is slechts ongeveer 40% van de missies die ooit naar Mars zijn gestuurd (door een ruimtevaartorganisatie) succesvol geweest. Het hele proces van binnenkomst, afdaling en landing duurt slechts enkele minuten, maar het ruimtevaartuig dat de volhardingsrover vervoert, moet vertragen van bijna 20.000 km per uur (~12.500 mijl per uur) naar nul en een open, vlak gebied vinden om te landen. Het oppervlak van Mars zit vol obstakels — enorme inslagkraters, kliffen, scheuren en grillige rotsblokken. Onvoorspelbare winden kunnen ook verdere complicaties veroorzaken.

Om een veilige landing te garanderen, maakt de Perseverance-rover tijdens het afdalen foto's en vergelijkt deze met de kaarten. Het kan snel beslissen of dat gebied door wetenschappers gevaarlijk is bevonden en aanpassingen doen om in een open gebied te landen. Bekijk de onderstaande video om te zien hoe de rover naar verwachting zal landen.
In deze eenheid coderen studenten de 123-robot om obstakels op de landingsplaatsen op hun 123-velden te detecteren om een veilige landing voor de rover te garanderen.
Wat is een sensor?
Een sensor is in wezen een apparaat dat een robot helpt om de wereld om hem heen te begrijpen. Het doet dit door gegevens over zijn omgeving te verzamelen en te rapporteren, die vervolgens in een project kunnen worden gebruikt om beslissingen te nemen of bepaald gedrag uit te voeren. Deze reeks kan worden gezien als een Sense → → Think Act-beslissingslus.
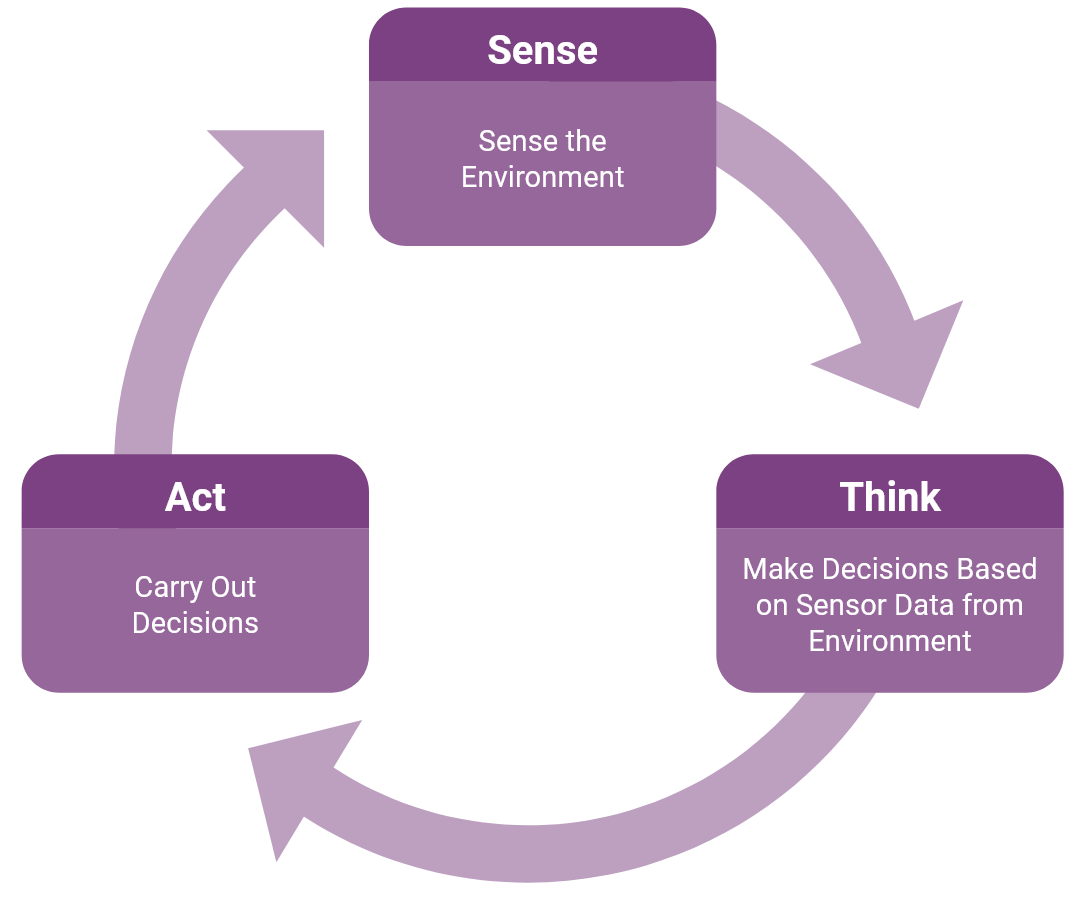
In deze eenheid detecteert de 123-robot objecten op het 123-veld om het gebied vrij te maken voor een veilige landing van de rover. De projectstudenten die ze maken, voeren deze lus uit terwijl de oogsensor de aanwezigheid van een object detecteert, waarna de VEXcode 123 commando's Denk na en neem beslissingen op basis van of de oogsensor een object detecteert of niet, en dan zal de 123 Robot handelen door de knop op de robot te laten gloeien.
Wat is de oogsensor?
De Oogsensor op de 123 Robot bevindt zich aan de voorkant, onder de witte pijl. De oogsensor kan worden gebruikt om de aanwezigheid of afwezigheid van een object te detecteren, evenals het kleur- of helderheidsniveau.

De oogsensor gebruikt infraroodlicht om objecten te detecteren. Lichtkleurige objecten reflecteren infrarood licht en worden gemakkelijker gedetecteerd door de oogsensor. Donkergekleurde objecten absorberen infraroodlicht en de oogsensor detecteert ze ook niet. Gebruik tijdens het apparaat wit of lichtgekleurd papier voor de obstakels om ervoor te zorgen dat de oogsensor deze objecten kan detecteren.
In dit apparaat wordt de oogsensor gebruikt om te detecteren wanneer een object zich in het pad van de 123-robot bevindt. De positie van de Oogsensor op de 123 Robot betekent dat deze alleen objecten direct ervoor kan detecteren. Houd hier rekening mee wanneer je je 123 Robots en obstakels bij je studenten plaatst, zodat de materialen studenten voorbereiden op succes.
Voor meer informatie over het coderen van de Oogsensor met VEXcode 123, zie het artikel De VEX 123 Oogsensor coderen met VEXcode 123 VEX Library.
Wat is VEXcode 123?
VEXcode 123 is een blokgebaseerde programmeertaal die wordt gebruikt met de 123 Robot. Een programmeertaal is een set regels waarin symbolen acties vertegenwoordigen. Programmeertalen volgen stapsgewijze instructies die een computer uitvoert om een project uit te voeren.
Voor meer informatie over het werken met VEXcode 123, zie het VEXcode 123-gedeelte van de VEX-bibliotheek.
Welke VEXcode 123 blokken heb je nodig?
De blokken in VEXcode 123 vertegenwoordigen 123 Robotcommando's die worden gebruikt om een project in VEXcode 123 te maken. Hieronder vindt u een lijst met de belangrijkste blokken die tijdens dit apparaat worden gebruikt.
| VEXcode 123 Blokken | Gedragingen |
|---|---|
 |
Het {When started} blok begint met het uitvoeren van de bijgevoegde stapel blokken wanneer het project wordt gestart. |
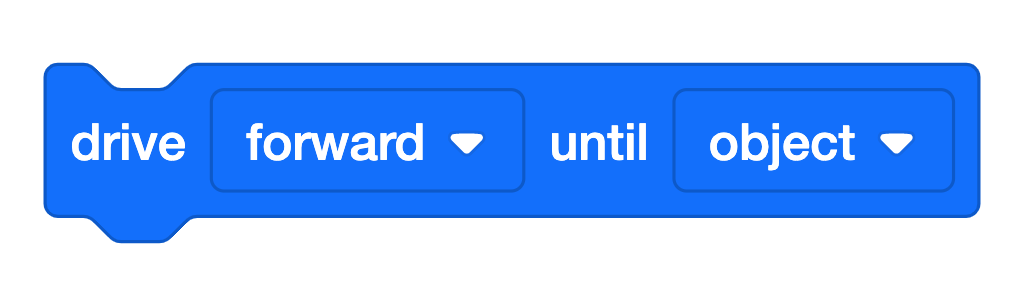 |
Het blok [Drive until] drijft de 123 Robot aan totdat aan een van de drie voorwaarden is voldaan.
|
 |
Het blok [Turn for] draait de 123 Robot een bepaald aantal graden naar links of rechts. |
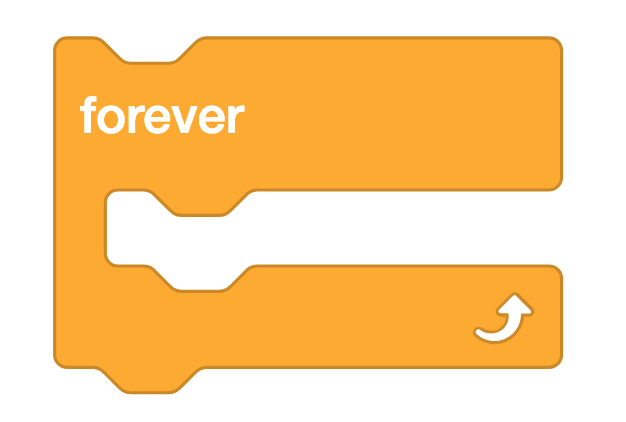 |
Het [Forever] blok herhaalt alle blokken in de ‘C‘ voor altijd. |
![[Wait] blok](/stemlabs/sites/default/files/inline-images/%5BWacht%5D.png) |
Het [Wait] -blok wacht een bepaalde tijd voordat het naar het volgende blok in een project gaat. |
 |
Het [Glow] blok stelt de gloeikleur van het indicatielampje in het midden van de 123 Robot in. |
Hoe werkt het blok [Drive until]?
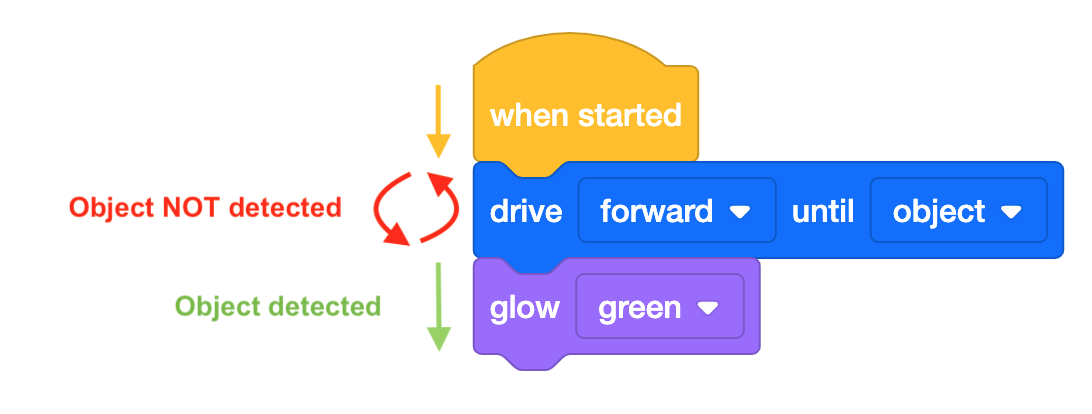
[Drive until] blokkeert herhaaldelijk een conditie controleren en de projectstroom controleren. Een project gaat niet naar het volgende blok in de stapel totdat aan de voorwaarde van het [Drive until] -blok is voldaan. In het onderstaande project zal de 123 Robot naar voren rijden en continu controleren of de Oogsensor een object heeft gedetecteerd. Zodra een object wordt gedetecteerd door de oogsensor, stopt de 123 Robot met rijden en gaat naar het volgende blok, een [Glow] -blok.
De voorwaarde die het rijden met de 123 Robot zal stoppen, kan worden ingesteld. Dit apparaat gebruikt de parameter "object", zodat de robot stopt met rijden wanneer de oogsensor aan de voorkant van de 123 Robot een object detecteert.
![[Drive until] blok met de parameter vervolgkeuzelijst weergegeven. De keuzes zijn object, crash en lijn. De objectkeuze wordt gemarkeerd met een zwart vinkje.](/stemlabs/sites/default/files/inline-images/Drive%20until%20met%20parameters.png)
Voorbereiden op een open uitdaging in deze unit
In deze unit wordt studenten gevraagd om wat ze eerder hebben geleerd te gebruiken om een project te maken om een uitdaging op te lossen. Omdat het belangrijk is om studenten regelmatig uit te dagen om problemen op te lossen en de vaardigheden die ze hebben geleerd op een nieuwe manier toe te passen, moedigen we je aan om je studenten uit te dagen en deze strategieën te gebruiken om veerkracht op te bouwen en hen door de uitdaging te helpen. Hier zijn een paar suggesties om studenten te helpen bij het experimenteren met hun projecten:
Feedback geven zonder de oplossing te geven - Fouten maken tijdens het werken aan een uitdaging wordt verwacht en aangemoedigd. "Fouten in het leren kunnen kansen creëren [en] kunnen helpen bij het realiseren van verbindingen."1 Het creëren van een bekend probleemoplossend proces met je studenten kan hen helpen te weten hoe ze een probleem kunnen identificeren en verder kunnen gaan wanneer ze een fout maken, waardoor verstoring en frustratie worden geminimaliseerd. Probeer de volgende probleemoplossingscyclus met je studenten te gebruiken om hen te helpen hun projecten op te lossen en hun eigen oplossingen te bedenken.
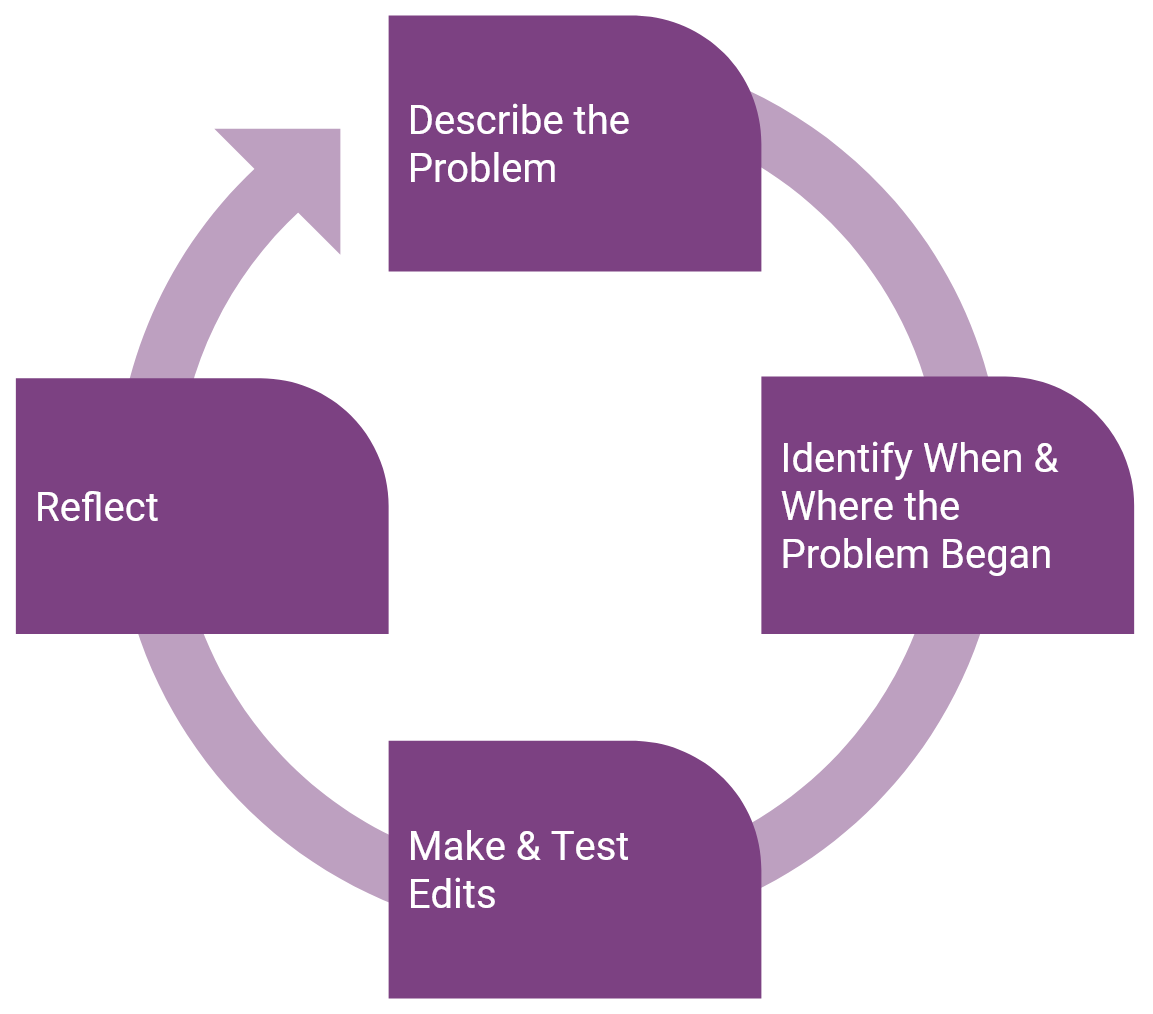 Probleemoplossingscyclus voor
Probleemoplossingscyclus voor - Beschrijf het probleem
- Vraag de student om uit te leggen wat er aan de hand is. Studenten moeten de fout kunnen relateren aan het gedeelde doel of de uitdaging.
- Hoe beweegt de 123 Robot in hun project? Hoe moet de robot bewegen?
- Vraag de student om uit te leggen wat er aan de hand is. Studenten moeten de fout kunnen relateren aan het gedeelde doel of de uitdaging.
- Identificeer wanneer en waar het probleem begon
- Vraag de student wanneer hij het probleem voor het eerst opmerkte.
- Welk deel van het project werd uitgevoerd?
- Als studenten moeite hebben om te bepalen waar in het project de fout zit, moedig ze dan aan om de Project Stepping-functie in VEXcode 123 te gebruiken. De visuele aanwijzingen die worden geleverd met de Project Stepping-functie kunnen worden gebruikt om studenten te helpen bij het oplossen van hun project door de mogelijkheid te hebben om de blokken één voor één uit te voeren. Dit geeft hen een beter beeld van welke blokken de fout kunnen veroorzaken, zodat foutopsporing een gerichter en efficiënter proces kan worden. Voor meer informatie over het gebruik van de Project Stepping-functie, zie het artikel Stepping Through a Project in VEXcode 123 VEX Library.
- Vraag de student wanneer hij het probleem voor het eerst opmerkte.
- Testbewerkingen & uitvoeren
- Als studenten een fout vinden, moeten ze hun project bewerken. Studenten kunnen het project testen met elke gemaakte bewerking. Als het project succesvol is, kunnen ze doorgaan naar de volgende stap in de probleemoplossingscyclus. Als het project niet succesvol is, kunnen ze teruggaan naar het begin van het proces en het opnieuw proberen.
- Reflecteren
- Vraag studenten om na te denken over de fout die ze tijdens het proces hebben gemaakt en overwonnen.
- Wat was de fout? Wat heb je van deze fout geleerd? Hoe kan het u helpen bij het coderen van de 123 Robot de volgende keer?
- Moedig studenten aan om hun fouten te herkennen en wat ze van het proces hebben geleerd om een groeimindset aan te moedigen. Een sterke nadruk op een groeimindset kan studenten helpen om te leren wanneer en hoe ze moeten volharden en ook wanneer ze om hulp moeten vragen.2 Als studenten hun proces kunnen zien als een voorloper van nieuw leren, kunnen ze de stappen hier gebruiken om hun eigen leren te bevorderen en het leren van hun klasgenoten te bevorderen. Als studenten deze problemen tegenkomen en nadenken over hun fouten, moedig ze dan aan om hun fouten te delen en te verwerken met medestudenten. Op deze manier kunnen studenten 'leermiddelen voor elkaar worden'3.
- Vraag studenten om na te denken over de fout die ze tijdens het proces hebben gemaakt en overwonnen.
Clear the Landing Area (Lab 2) is ontworpen als een verkenning met een open einde die je studenten zal vragen om door te zetten om een uitdaging op te lossen. In dit Lab introduceren we lussen met het blok [Forever] en vragen we studenten om te experimenteren met het gebruik van lussen in hun project om de 123 Robot naar alle obstakels op het landingsterrein te laten rijden en deze te detecteren (VEX 123 Field). Als het gebruik van loops in een project nieuw is voor je studenten, kunnen er verschillende iteraties van hun projecten nodig zijn om loops effectief te gebruiken. Gebruik de suggesties in dit gedeelte om studenten voor te bereiden op het trial and error-proces en om hen te helpen hun projecten op te lossen om het doel van de uitdaging te bereiken. Het gedeelte Faciliteren van Play Part 1 en 2 bevat extra instructiesteunen voor het begeleiden van studenten door de Lab 2-uitdaging. Het hebben van een plan voor hoe je ondersteuning biedt bij het oplossen van problemen en vallen en opstaan die vereist is in dit Lab, kan je helpen om aan de individuele behoeften van je studenten te voldoen.
Zie het artikel Building Resilience in STEM Labs VEX Library voor meer informatie over hoe effectieve feedback studenten kan helpen veerkracht en een groeimindset op te bouwen tijdens het werken via STEM Labs.
1 Hattie, John en Shirley Clarke. Zichtbaar leren: feedback. Routledge, Taylor & Francis Group, 2019.
2 Ibid.
3 Ibidem, p. 121