
Achtergrond
Met de Mars Rover: Landing Challenge Unit dagen we je leerlingen uit om VEXcode GO-projecten te bouwen om een probleem op te lossen. In deze eenheid maken leerlingen kennis met het gebruik van de oogsensor aan de voorkant van de Code Base. Deze uitdaging is geïnspireerd op het proces dat wetenschappers gebruiken bij het landen van ruimtevaartuigen, zoals de Perseverance-rover van Mars 2020. Studenten coderen de Code Base om een obstakel te detecteren en stoppen vervolgens met rijden om aan te geven dat er een obstakel op de landingsplaats is gevonden.
NASA's Mars 2020-missie
De Mars 2020-missie van NASA is gericht op wetenschappelijke doelen met hoge prioriteit voor de exploratie van Mars: leven, klimaat, geologie en mensen. Maar voordat de Perseverance-rover zijn missie kan beginnen met het verzamelen van gesteente- en bodemmonsters van het oppervlak, moet de rover veilig landen op de Rode Planeet.
Volgens NASA zijn slechts 40% van de missies naar Mars (door welk ruimtevaartagentschap dan ook) succesvol geweest. Het hele proces van binnenkomst, afdaling en landing duurt slechts enkele minuten, maar het ruimtevaartuig dat de Perseverance-rover aan boord heeft, moet eerst zijn snelheid terugbrengen van bijna 20.000 km per uur (~12.500 mijl per uur) naar nul en vervolgens een open, vlak gebied vinden om te landen. Het Marsoppervlak ligt vol obstakels: enorme inslagkraters, kliffen, scheuren en puntige rotsblokken. Ook onvoorspelbare winden kunnen voor nog meer complicaties zorgen.

Om een veilige landing te garanderen, maakt de Perseverance-rover tijdens de daling foto's en vergelijkt deze met de kaarten. Het systeem kan snel bepalen of een gebied door wetenschappers als gevaarlijk is aangemerkt en aanpassingen doorvoeren om het in een open gebied te laten landen. Bekijk de onderstaande animatie om een beter beeld te krijgen van het besluitvormingsproces van de rover aan de hand van afdalingsfoto's.
In deze eenheid coderen studenten de Code Base om obstakels te detecteren op de landingsplaatsen op hun velden. Zo zorgen ze ervoor dat de rover veilig kan landen.
Wat is een sensor?
Een sensor is in feite een apparaat dat een robot helpt de wereld om zich heen te begrijpen. Dit doet de robot door gegevens over zijn omgeving te verzamelen en te rapporteren. Deze gegevens kunnen vervolgens in een project worden gebruikt om de robot beslissingen te laten nemen of bepaald gedrag te laten vertonen. Deze volgorde kan worden beschouwd als een 'Waarnemen → Denken → Handelen'-beslissingslus.
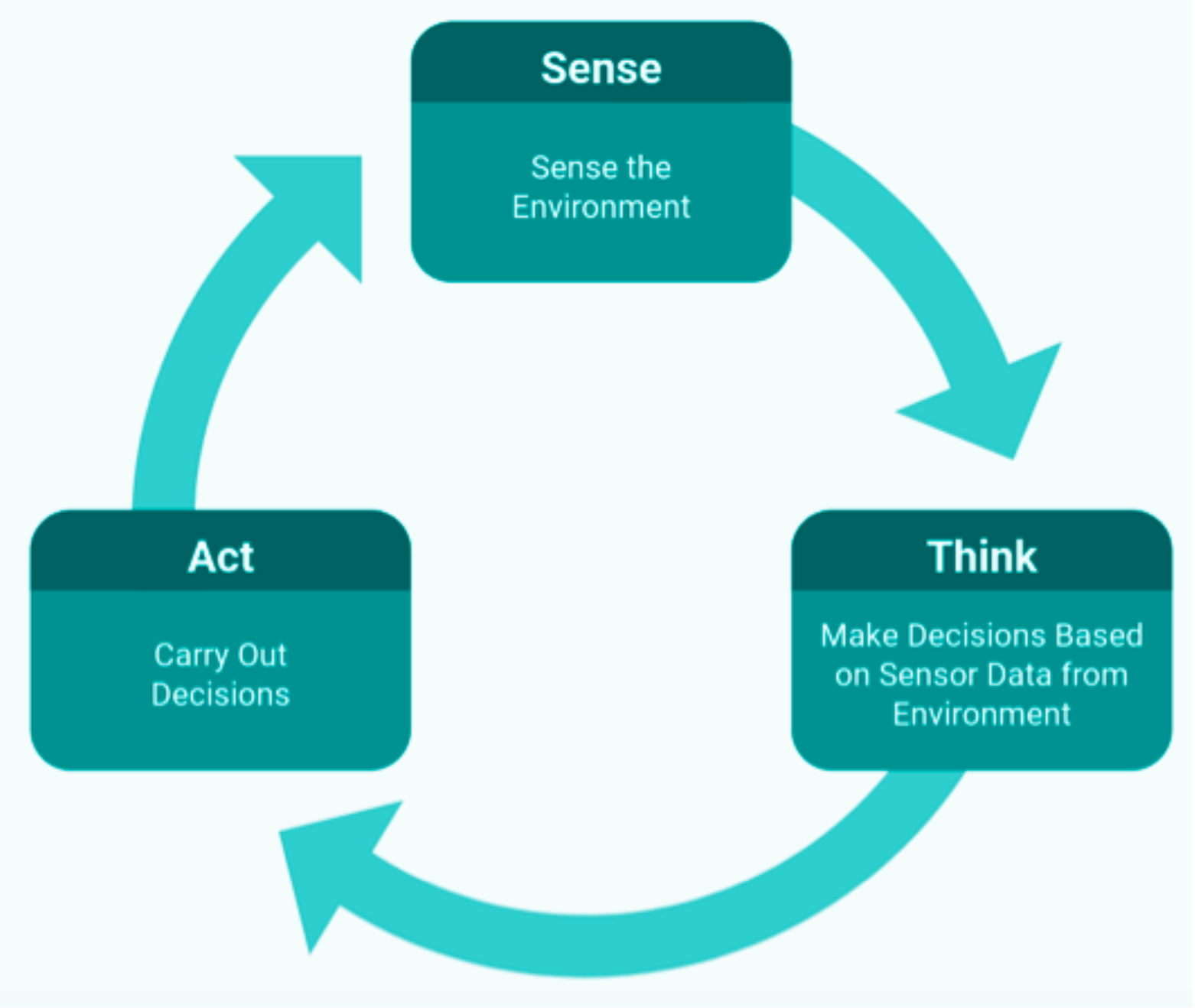
In deze eenheid gebruikt de Code Base de oogsensor om objecten op het veld te detecteren, zodat het gebied vrijgemaakt kan worden voor een veilige landing van de rover. The project students create carries out this loop as the Eye Sensor on the Code Base will Sense the presence of an object, then the VEXcode GO commands Think to make a decision based on whether the Eye Sensor detects an object or not. Then the Code Base will Act and stop driving based on the presence of the object.
Wat is de oogsensor?
DeEye Sensoris een sensor die drie dingen kan vaststellen: de aanwezigheid van een object, de kleur ervan en de helderheid van een object of oppervlak. In deze unit wordt de oogsensor gebruikt om een object te detecteren, zodat het uit de landingsplaats kan worden verwijderd. De gegevens die de oogsensor rapporteert, zijn te zien in de monitorconsole. Deze biedt leerlingen een visuele weergave van wat de robot 'ziet'. Deze gegevens kunnen worden gebruikt om de verbinding te leggen tussen de sensoren en het gedrag van de robot. Zie dit VEX-bibliotheekartikel voor meer informatie over het gebruik van de Monitor Console in VEXcode GO.
De oogsensor op de Code Base - Eye Forward build bevindt zich aan de voorkant, zoals weergegeven in de onderstaande afbeelding. Met de oogsensor kunt u de aanwezigheid of afwezigheid van een object detecteren, evenals de kleur of helderheid ervan.
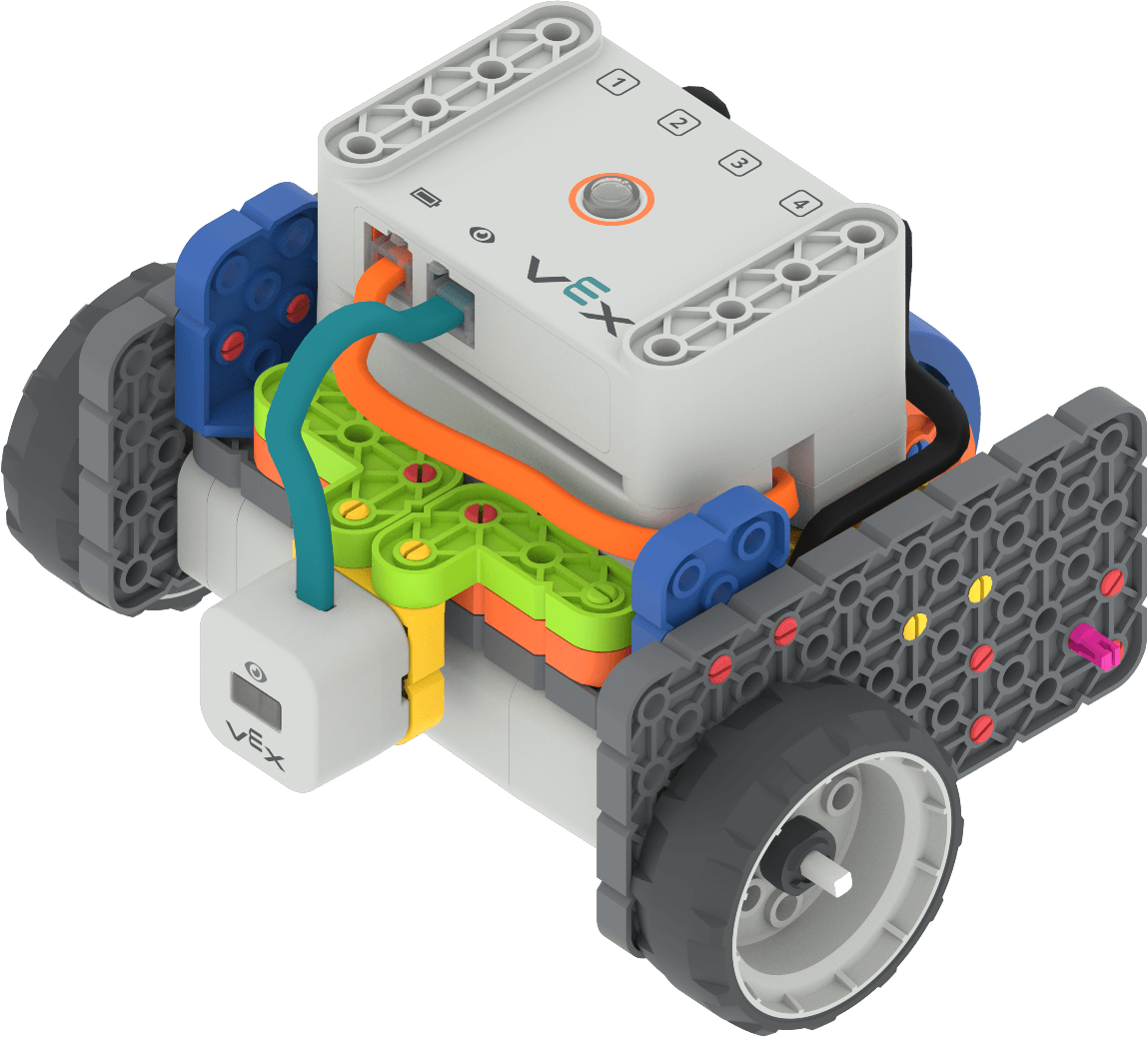
De oogsensor gebruikt infraroodlicht om objecten te detecteren. Lichtgekleurde objecten reflecteren infraroodlicht en worden gemakkelijker gedetecteerd door de oogsensor. Donkere objecten absorberen infraroodlicht en de oogsensor detecteert deze minder goed. Gebruik tijdens de Unit wit of lichtgekleurd papier voor de obstakels om ervoor te zorgen dat de oogsensor deze objecten kan detecteren.
In deze unit wordt de oogsensor gebruikt om te detecteren of er een object aanwezig is in het pad van de codebasis. De positie van de oogsensor op de codebasis zorgt ervoor dat deze alleen objecten direct voor zich kan detecteren. Houd hier rekening mee wanneer u uw Code Base en obstakels bij uw studenten neerlegt, zodat de materialen de studenten voorbereiden op succes.
Voor meer informatie over de oogsensor en hoe deze werkt, zie het artikelCodering met de VEX GO oogsensorVEX-bibliotheek.
Wat is VEXcode GO?
VEXcode GO is een codeeromgeving die wordt gebruikt om te communiceren met VEX GO-robots. Studenten gebruiken de drag-and-dropinterface om VEXcode GO-projecten te maken waarmee ze de acties van hun robots kunnen aansturen. Het doel van elk blok kan worden geïdentificeerd aan de hand van visuele aanwijzingen, zoals de vorm, kleur en het label. Voor meer informatie over het werken met VEXcode GO, de VEXcode GO-sectie van de VEX-bibliotheek.
De blokken in VEXcode GO stellen robotopdrachten voor die worden gebruikt om een project in VEXcode GO te maken. Hieronder vindt u een lijst met de belangrijkste blokken die tijdens deze eenheid worden gebruikt.
| VEXcode GO-blokken | Gedragingen |
|---|---|
 |
Blok {When started} begint met het uitvoeren van de gekoppelde stapel blokken wanneer het project wordt gestart. |
 |
Het blok [Drive] beweegt de aandrijflijn voor altijd vooruit of achteruit. |
 |
Met het blok [Draai voor] draait u de aandrijflijn over een bepaalde afstand. |
 |
Het blok [Forever] herhaalt alle blokken die zich binnen de 'C' bevinden voor altijd. |
 |
Het blok [Wachten] wacht een bepaalde tijd voordat er naar het volgende blok in een project wordt gegaan. |
 |
Het blok [Wachten tot] wacht tot de voorwaarde erin TRUE rapporteert voordat het naar het volgende blok gaat. |
 |
Het blok <Found object> geeft aan of de oogsensor een object detecteert. |
 |
Het blok [Stop rijden] stopt de aandrijflijn. |
 |
Met het blok [Bumperkleur instellen] stelt u de kleur van de LED-bumper in. |
Hoe werkt het [Wachten tot] blok met de Oogsensor?
In deze eenheid gebruiken studenten de oogsensor op de codebasis om obstakels te detecteren in het landingsgebied van de Marsrover. Om dit te coderen, gebruiken ze het [Wachten tot] blok in een project. Het blok [Wachten tot] is een controleblok dat herhaaldelijk een voorwaarde controleert om de stroom van een project te beheren. Een project gaat pas naar het volgende blok als de voorwaarde in het blok [Wachten tot] waar is. In deze eenheid wordt het blok [Wachten tot] gebruikt met blok<Found object> als voorwaarde. Er wordt dan gewacht totdat de oogsensor een object detecteert en de voorwaarde van blok <Found object> waar is, voordat er naar het volgende blok in het project wordt gegaan.
De blokken [Wachten tot] kunnen worden gebruikt in combinatie met blokken die niet wachten, zoals het blok [Rijden] in deze eenheid, zodat de codebasisvooruit kan rijdende oogsensor een object detecteert. Bekijk de onderstaande animatie om te zien hoe het [Wachten tot]-blok wordt gebruikt om te voorkomen dat de robot een obstakel raakt.
Bekijk de Highlight Feature in VEXcode GO om de projectstroom in realtime te bekijken terwijl uw robot draait. Aan het begin van het project verschijnt de groene markering rond het blok [Wachten tot] totdat aan de voorwaarde is voldaan. De groene markering verschijnt om de blokken die niet in de wachtrij staan over te slaan (in dit geval het blok [Drive]), omdat deze opdrachten snel worden uitgevoerd.
In deze eenheid gebruiken studenten een combinatie van wachtblokken, zoals het blok [Wachten tot], en niet-wachtblokken, zoals het blok [Rijden], in hun projecten om de Lab-activiteiten en -uitdagingen te voltooien. Lees dit artikel in de VEX-bibliotheek voor meer informatie over wachtende en niet-wachtende blokken in VEXcode GO.
Voorbereiding op de open-ended challenge in deze unit
In deze eenheid wordt van studenten verwacht dat ze datgene wat ze eerder hebben geleerd, gebruiken om een project te maken waarmee ze een uitdaging kunnen oplossen. Omdat het belangrijk is om leerlingen regelmatig uit te dagen om problemen op te lossen en de vaardigheden die ze hebben geleerd op een nieuwe manier toe te passen, moedigen we u aan om uw leerlingen uit te dagen en deze strategieën te gebruiken om veerkracht op te bouwen en hen te helpen bij de uitdaging. Hier zijn een paar suggesties die studenten kunnen helpen bij het experimenteren met hun projecten:
Geef feedback zonder de oplossing te geven. -Het is normaal en wordt aangemoedigd dat er fouten worden gemaakt bij het werken aan een uitdaging. “Fouten bij het leren kunnen kansen creëren en kunnen helpen verbanden te leggen.”1 Door samen met uw leerlingen een vertrouwd probleemoplossingsproces te creëren, kunnen ze leren hoe ze een probleem kunnen herkennen en verder kunnen gaan als ze een fout maken. Zo worden verstoring en frustratie tot een minimum beperkt. Probeer de volgende probleemoplossingscyclus met uw leerlingen uit om hen te helpen problemen op te lossen met hun projecten en hun eigen oplossingen te bedenken.
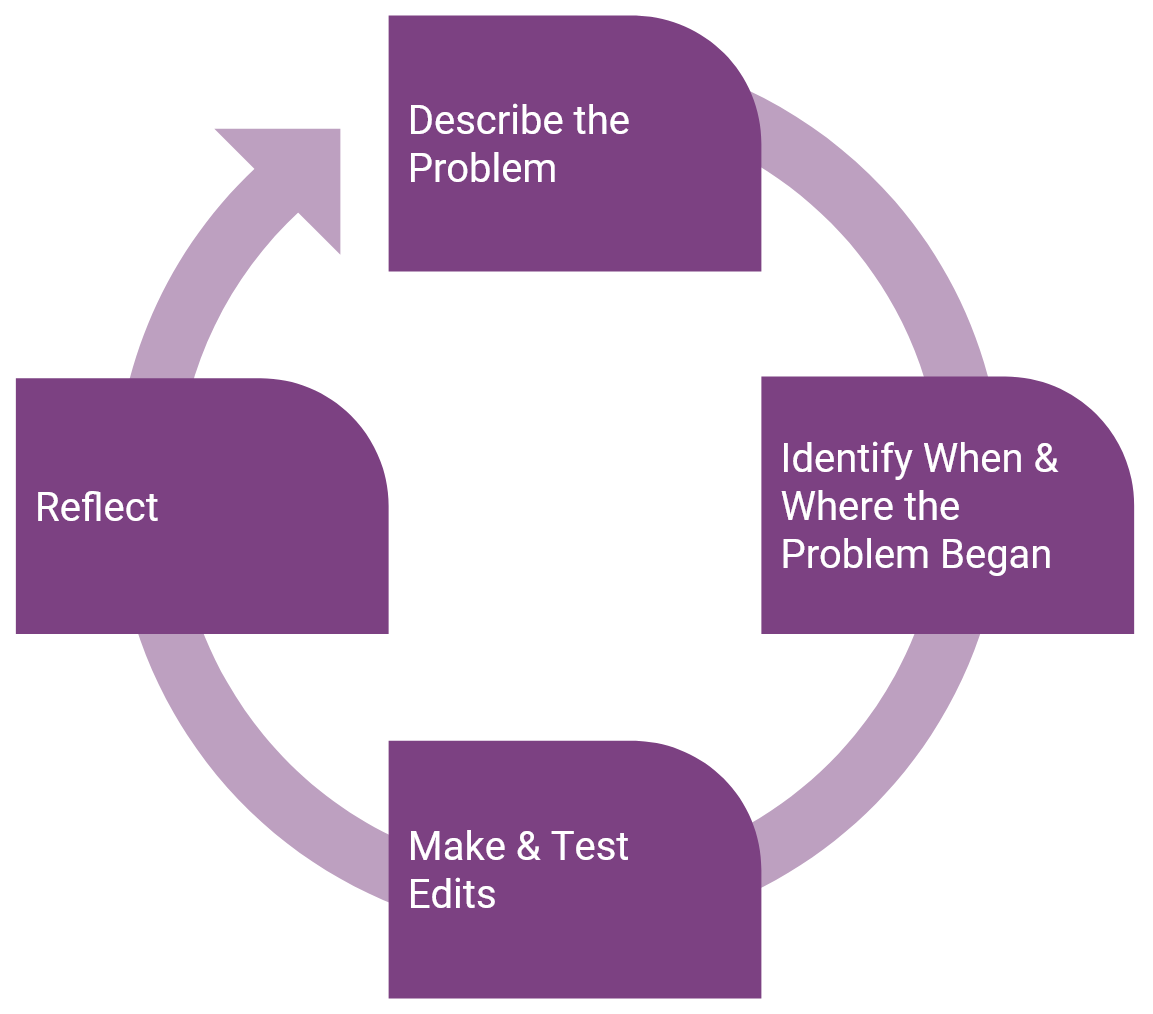
- Beschrijf het probleem
- Vraag de leerling uit te leggen wat er mis is. Studenten moeten in staat zijn de fout te relateren aan het gezamenlijke doel of de uitdaging waar ze mee te maken hebben.
- Hoe verloopt de ontwikkeling van de Code Base in hun project? Hoe moet de bewegen?
- Vraag de leerling uit te leggen wat er mis is. Studenten moeten in staat zijn de fout te relateren aan het gezamenlijke doel of de uitdaging waar ze mee te maken hebben.
- Identificeer wanneer en waar het probleem begon
- Vraag de student wanneer hij/zij het probleem voor het eerst opmerkte.
- Welk deel van het project werd uitgevoerd?
- Als studenten moeite hebben om te bepalen waar in het project de fout zit, moedig ze dan aan om de Project Stepping-functie in VEXcode GO te gebruiken. De visuele aanwijzingen van de Project Stepping-functie kunnen worden gebruikt om studenten te helpen problemen met hun project op te lossen. Ze kunnen namelijk zien hoe de blokken één voor één worden uitgevoerd. Hierdoor krijgen ze een beter beeld van welke blokken de fout kunnen veroorzaken. Hierdoor kan het debuggen gerichter en efficiënter worden. Voor meer informatie over het gebruik van de Project Stepping-functie, zie het artikel Stappen door een project in VEXcode GO VEX-bibliotheek.
- Vraag de student wanneer hij/zij het probleem voor het eerst opmerkte.
- Voer & testbewerkingen uit
- Wanneer leerlingen een fout vinden, moeten ze wijzigingen aanbrengen in hun project. Studenten kunnen het project testen met elke bewerking die ze maken. Als het project succesvol is, kunnen ze doorgaan naar de volgende stap in de probleemoplossingscyclus. Als het project niet succesvol is, kunnen ze teruggaan naar het begin van het proces en het opnieuw proberen.
- Reflect
- Laat de leerlingen nadenken over de fouten die ze tijdens het proces hebben gemaakt en die ze hebben overwonnen.
- Wat was de fout? Wat heb je van deze fout geleerd? Hoe kan het u helpen bij het de volgende keer coderen van de Code Base?
- Moedig leerlingen aan om hun fouten en wat ze van het proces hebben geleerd te erkennen. Zo wordt een groeimindset gestimuleerd. Door sterk de nadruk te leggen op een groeimindset kunnen leerlingen leren wanneer en hoe ze moeten volhouden en ook wanneerom hulp moeten vragen.2Als leerlingen hun leerproces kunnen zien als een voorloper van nieuw leren, kunnen ze de stappen hier gebruiken om hun eigen leerproces en dat van hun klasgenoten te bevorderen. Wanneer leerlingen deze problemen tegenkomen en over hun fouten nadenken, moedig hen dan aan om hun fouten en de manier waarop ze daarmee omgaan met medeleerlingen te delen. Op deze manier kunnen studenten ‘leermiddelen voor elkaar’ worden.3
- Laat de leerlingen nadenken over de fouten die ze tijdens het proces hebben gemaakt en die ze hebben overwonnen.
Clear the Landing Area (Lab 2) is bedoeld als een open onderzoek waarin je leerlingen moeten doorzetten om een uitdaging op te lossen. In dit lab introduceren we lussen met het [Forever]-blok en vragen we studenten om te experimenteren met het gebruik van lussen in hun project, zodat de codebasis naar alle obstakels op het landingsgebied (GO-veld) rijdt en deze detecteert. Als het gebruik van lussen in een project nieuw is voor uw studenten, kan het meerdere iteraties van hun project vergen voordat ze lussen effectief kunnen gebruiken. Gebruik de suggesties die in dit gedeelte worden beschreven om leerlingen voor te bereiden op het proces van vallen en opstaan. Ook kunt u ze helpen bij het oplossen van problemen in hun projecten, zodat ze het doel van de uitdaging kunnen bereiken. Het onderdeel Begeleiding van Speldeel 1 en 2 bevat aanvullende instructieve ondersteuning om leerlingen door de Lab 2-uitdaging te begeleiden. Als u een plan hebt voor de manier waarop u de ondersteuning gaat bieden bij het probleemoplossen en het vallen en opstaan dat nodig is in dit lab, kunt u beter inspelen op de individuele behoeften van uw leerlingen.
Zie het artikel Building Resilience in STEM Labs VEX Library voor meer informatie over hoe effectieve feedback leerlingen kan helpen veerkracht en een groeimindset op te bouwen terwijl ze STEM Labs volgen.
1 Hattie, John en Shirley Clarke. Zichtbaar leren: feedback. Routledge, Taylor & Francis Group, 2019.
2 Ibid.
3 Ibid., blz. 121