
Achtergrond
Ontwerpers, ingenieurs en computerwetenschappers creëren oplossingen voor problemen die elke dag optreden. In deze Parade Float-eenheid gebruiken leerlingen het Engineering Design-proces om een authentiek probleem op te lossen. Studenten onderzoeken hoe ze een autonome, robotische praalwagen kunnen ontwerpen, bouwen en programmeren. Deze praalwagen navigeert door een doolhof dat de echte obstakels van een paraderoute nabootst.
Wat is een praalwagen?
Een parade is een grote of kleine groep mensen die samen loopt, vaak gekleed in kostuums, gevolgd door marcherende bands en praalwagens. Een praalwagen is een versierd platform, op een voertuig is gebouwd of achter een voertuig wordt getrokken. Parades worden vaak gehouden op feestdagen of ter ere van iemand. Meestal zijn het vieringen van een bepaald soort.

Iteratie
Iteratie wordt gedefinieerd als de handeling of het proces van herhalen. In onze doeleinden is iteratie de systematische, cyclische ontwerpcyclus waarin producten worden gepland, gebouwd, getest en verbeterd totdat ze effectief een technisch probleem oplossen. Iteratie is het onderdeel van de EDP waar producten opnieuw worden geprototypeerd, getest, verfijnd en geprototypeerd totdat ze voldoen aan de door het ontwerpteam vastgestelde criteria. Itereren is het verbeteren van je productontwerp.
In deze unit brengen studenten het eerste ontwerp van hun praalwagen tot leven, gaan ze in discussie over het ontwerp en hoe ze het kunnen verbeteren. Ze zullen wijzigingen aanbrengen, testen en opnieuw verfijnen, deze cyclus herhalen of herhalen, totdat ze tevreden zijn met het ontwerp en het voldoet aan de projectvereisten.
Het engineering ontwerpproces
Studenten gebruiken het Engineering Design Process (EDP) om een paradewagen te ontwerpen en te bouwen. De EDP is een reeks stappen die ingenieurs volgen om oplossingen voor problemen te bedenken. Vaak gaat de oplossing om het ontwerpen van een product dat aan bepaalde criteria voldoet of een bepaalde taak volbrengt.
De EDP kan worden onderverdeeld in de volgende stappen: DEFINIEER → ONTWIKKEL OPLOSSINGEN → OPTIMALISEER.
- Het definiëren van technische problemen houdt in dat het op te lossen probleem zo duidelijk mogelijk wordt vermeld in termen van succescriteria en beperkingen of limieten.
- Het ontwerpen van oplossingen voor technische problemen begint met het genereren van een aantal verschillende mogelijke oplossingen en vervolgens het evalueren van mogelijke oplossingen om te zien welke het beste voldoen aan de criteria en beperkingen van het probleem.
- Het optimaliseren van de ontwerpoplossing omvat een proces waarin oplossingen systematisch worden getest en verfijnd en het uiteindelijke ontwerp wordt verbeterd door minder belangrijke functies in te ruilen voor functies die belangrijker zijn.
De EDP is cyclisch of iteratief van aard. Het is een proces van het maken, testen en analyseren en verfijnen van een product of proces. Op basis van de testresultaten worden nieuwe iteraties gemaakt en blijven deze worden aangepast totdat het ontwerpteam tevreden is met de resultaten.
In deze unit gebruiken studenten de EDP om een robotparadevlotter te bedenken, te plannen en te bouwen. Na een eerste bouw zullen groepen hun floatontwerp testen en verbeteren om te voldoen aan ontwerpcriteria en beperkingen.
Wat is Pseudocode?
Pseudocode is een afkorting voor codering die verbale en schriftelijke beschrijvingen van code combineert.
Vaak kunnen studenten hun weg naar het vinden van een oplossing 'raden en controleren'. Dit leidt er echter niet toe dat ze een conceptueel begrip van de coderingsconcepten opbouwen. Het schrijven van pseudocode helpt studenten om verder te gaan dan een oppervlakkig begrip van coderen, naar een meer conceptueel begrip. Pseudocode vereist dat de leerlingen conceptueel nadenken over hun codeeroplossing voordat ze beginnen met coderen. Docenten moeten pseudocode met studenten bespreken door studenten te vragen:
- Wat willen ze met hun project bereiken?
- Hoe ga je de intentie of het doel van het project opsplitsen in korte specifieke uitspraken?
In dit voorbeeld, als studenten werd gevraagd om een pseudocode te maken om te willen dat de robot vooruit gaat, een muur detecteert, naar rechts draait en vervolgens weer vooruit gaat, zou het het volgende zijn:
- Rijd de robot naar voren tot hij 50 mm van een muur verwijderd is
- Stop de robot
- Draai de robot 90 graden
- Stop de robot
- Rijd 600 mm vooruit
Zodra een pseudocode is gemaakt, maken studenten vervolgens de code om de robot te instrueren hoe elke stap van hun pseudocode met succes kan worden voltooid.
Ontleding
Decompositie houdt in dat een complex probleem wordt opgesplitst in gedragingen die beter beheersbaar en gemakkelijker te begrijpen zijn. Door het probleem op te splitsen in kleinere onderdelen, kan elk onderdeel gedetailleerder worden onderzocht en gemakkelijker worden opgelost. Als een student bijvoorbeeld wil dat zijn robot in een vierkant beweegt, moet hij deze opsplitsen in kleinere opdrachten. Het verfijnen van het uitsplitsingsproces is belangrijk voor studenten om te oefenen, omdat ze de opdrachten in eerste instantie niet in kleinere componenten opsplitsen:
| Verplaats in een vierkante uitsplitsing 1 | Beweeg in een vierkante uitsplitsing 2 | Beweeg in een vierkante uitsplitsing 3 |
|---|---|---|
|
|
|
Sequencing
Sequencing is de specifieke volgorde waarin gedrag wordt uitgevoerd in een algoritme of een reeks instructies. Een actie of gebeurtenis leidt tot de volgende geordende actie in een reeks. Sequencing is belangrijk zodat leerlingen hun robots correct kunnen coderen.
Om een robot precies en precies te vertellen hoe hij moet bewegen, zijn zowel decompositie als sequencing nodig. Ten eerste zal het probleem, zoals het navigeren door een doolhof, worden opgesplitst in kleinere stappen en gedragingen. Zodra deze gedragingen zijn geïdentificeerd, moeten ze in de juiste volgorde worden georganiseerd. Dit is belangrijk, omdat de robot alleen precies beweegt zoals deze is gecodeerd.
Studenten zullen hun paradewagen coderen om door een paradedoolhof te bewegen. Ze moeten de opdrachten in hun project zo rangschikken dat hun vlotter vooruit, achteruit, links en rechts in de juiste volgorde beweegt om door het paradedoolhof te navigeren.
Wat is VEXcode GO?
VEXcode GO is een codeeromgeving die wordt gebruikt om te communiceren met VEX GO-robots. Studenten gebruiken de interface voor slepen en neerzetten om VEXcode GO-projecten te maken die hun robotacties regelen. Het doel van elk blok kan worden geïdentificeerd met behulp van visuele aanwijzingen zoals de vorm, kleur en label.
De volgende VEXcode GO-blokken worden in dit apparaat gebruikt:
[Rijden voor] - beweegt de aandrijflijn vooruit of achteruit over een bepaalde afstand. Kies in welke richting de aandrijflijn zal bewegen en stel in hoe ver deze zal bewegen door een waarde in het ovaal in te voeren.

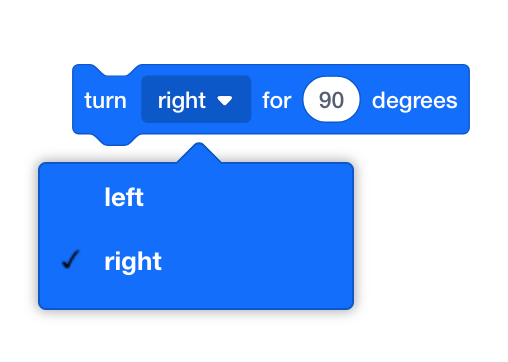
[Draaien voor] - draait de aandrijflijn een bepaald aantal graden naar links of rechts. Kies de richting waarin de aandrijflijn zal draaien en stel in hoe ver deze zal bewegen door een aantal graden in het ovaal in te voeren.
[Wait] - Wacht een bepaalde tijd voordat u naar het volgende blok gaat.

[Comment] - hiermee kunnen programmeurs informatie schrijven om hun project te helpen beschrijven. Opmerkingen veranderen het project of de blokken eromheen niet.

[Draai voor] - laat een motor in een bepaalde richting draaien over een bepaalde afstand vanaf de huidige locatie.

- Standaard wachten andere blokken totdat de motor klaar is met bewegen. U kunt de pijl selecteren om uit te vouwen "en wacht niet" - dit zorgt ervoor dat andere blokken blijven draaien terwijl de motor of motorgroep beweegt.

Om VEXcode GO in uw klaslokaal te gebruiken, downloadt u de VEX Classroom-app op het apparaat van een docent en volgt u de stappen in artikel De VEX Classroom-app gebruiken om te leren hoe u de firmware van GO Brains kunt updaten, GO Brains een andere naam kunt geven en kunt vinden en de batterijen van GO Brains in uw klaslokaal kunt controleren. Ga voor meer informatie over VEXcode GO naar de sectie VEXcode GO van de VEX Robotics VEX Library.