
خلفية
يقوم المصممون والمهندسون وعلماء الكمبيوتر بإنشاء حلول لحل المشكلات اليومية. في وحدة العرض العسكري هذه، سيستخدم الطلاب عملية التصميم الهندسي لحل مشكلة حقيقية. سوف يستكشف الطلاب كيفية تصميم وبناء وترميز عربة عرض آلية مستقلة للتنقل عبر متاهة تحاكي العقبات الحقيقية في طريق العرض.
ما هي عوامة العرض؟
العرض هو عبارة عن مجموعة كبيرة أو صغيرة من الأشخاص الذين يسيرون معًا ويرتدون غالبًا أزياءً تتبعها فرق موسيقية وعوامات. عوامة العرض هي عبارة عن منصة مزخرفة، إما مبنية على مركبة، أو مسحوبة خلف واحدة. غالبًا ما تقام المسيرات في عطلة أو لتكريم شخص ما، وعادةً ما تكون احتفالًا من نوع ما.

التكرار
يتم تعريف التكرار على أنه الفعل أو العملية المتمثلة في التكرار. لأغراضنا، التكرار هو حلقة التصميم المنهجية والدورية التي يتم فيها التخطيط للمنتجات وبنائها واختبارها وتحسينها حتى تحل مشكلة هندسية بشكل فعال. التكرار هو جزء من EDP حيث يتم إنشاء النماذج الأولية للمنتجات واختبارها وتحسينها وإنشاء النماذج الأولية مرة أخرى حتى تلبي المعايير التي وضعها فريق التصميم. التكرار يعني تحسين تصميم منتجك.
في هذه الوحدة، سوف يقوم الطلاب بتجسيد التصميم الأول لعوامتهم، والمشاركة في مناقشة حول التصميم وكيفية تحسينه. سيقومون بإجراء التعديلات والاختبار والتحسين مرة أخرى، وتكرار هذه الدورة، أو التكرار، حتى يصبحوا راضين عن التصميم وأنه يلبي متطلبات المشروع.
عملية التصميم الهندسي
سيستخدم الطلاب عملية التصميم الهندسي (EDP) لتصميم وبناء عوامة العرض. إن EDP عبارة عن سلسلة من الخطوات التي يتبعها المهندسون للتوصل إلى حلول للمشاكل. في كثير من الأحيان، يتضمن الحل تصميم منتج يلبي معايير معينة أو ينجز مهمة معينة.
يمكن تقسيم عملية تطوير الحلول الإلكترونية إلى الخطوات التالية: التعريف → تطوير الحلول → التحسين.
- يتضمن المشكلات الهندسية تحديد المشكلة التي يتعين حلها بوضوح قدر الإمكان من حيث معايير النجاح والقيود أو الحدود.
- يبدأ تصميم الحلول للمشاكل بتوليد عدد من الحلول الممكنة المختلفة، ثم تقييم الحلول المحتملة لمعرفة أيها يلبي بشكل أفضل معايير وقيود المشكلة.
- يتضمن حل التصميم عملية يتم فيها اختبار الحلول وتحسينها بشكل منهجي وتحسين التصميم النهائي من خلال التنازل عن الميزات الأقل أهمية مقابل تلك الأكثر أهمية.
إن EDP عبارة عن دورة أو تكرارية في الطبيعة. إنها عملية تصنيع واختبار وتحليل وتحسين منتج أو عملية. بناءً على نتائج الاختبار، يتم إنشاء تكرارات جديدة، والاستمرار في تعديلها حتى يصبح فريق التصميم راضيًا عن النتائج.
في هذه الوحدة، سوف يستخدم الطلاب EDP لتخيل وتخطيط وبناء عربة عرض روبوتية. بعد البناء الأولي، ستقوم المجموعات باختبار وتحسين تصميم الطفو الخاص بها لتلبية معايير التصميم والقيود.
ما هو الكود الزائف؟
الكود الزائف هو اختصار للترميز يجمع بين الأوصاف اللفظية والمكتوبة للكود.
في كثير من الأحيان، يمكن للطلاب "التخمين والتحقق" من طريقتهم للعثور على الحل. ومع ذلك، فإن هذا لا يؤدي إلى تمكينهم من بناء فهم مفاهيمي لمفاهيم الترميز. تساعد كتابة الكود الزائف الطلاب على تجاوز الفهم السطحي للترميز، إلى فهم أكثر مفاهيميًا. يتطلب الكود الزائف أن يفكر الطلاب بشكل مفاهيمي حول حل الترميز الخاص بهم قبل أن يبدأوا في الترميز. يجب على المعلمين مناقشة الكود الزائف مع الطلاب من خلال طرح الأسئلة التالية على الطلاب:
- ماذا يريدون أن يحقق مشروعهم؟
- كيف ستقوم بتقسيم نية أو هدف المشروع إلى عبارات محددة قصيرة؟
في هذا المثال، إذا طُلب من الطلاب إنشاء رمز زائف لجعل الروبوت يتحرك للأمام، ويكتشف جدارًا، ويدور إلى اليمين، ثم يتحرك للأمام مرة أخرى، فسيكون على النحو التالي:
- قم بدفع الروبوت للأمام حتى يصبح على بعد 50 مم من الحائط
- أوقف الروبوت
- أدر الروبوت 90 درجة
- أوقف الروبوت
- دفع للأمام 600 مم
بمجرد إنشاء الكود الزائف، سيقوم الطلاب بعد ذلك بإنشاء الكود لإرشاد الروبوت حول كيفية إكمال كل خطوة من خطوات الكود الزائف الخاص بهم بنجاح.
التحلل
يتضمن التحلل تقسيم المشكلة المعقدة إلى أكثر قابلية للإدارة وأسهل للفهم. إن تقسيم المشكلة إلى أجزاء أصغر يعني أنه يمكن فحص كل جزء بمزيد من التفصيل وحله بسهولة أكبر. على سبيل المثال، إذا أراد الطالب أن يتحرك الروبوت الخاص به في مربع، فسوف يحتاج إلى تقسيم ذلك إلى أوامر أصغر. من المهم للطلاب أن يتدربوا على تحسين عملية التحليل، حيث قد لا يتمكنون من تقسيم الأوامر إلى مكونات أصغر في البداية:
| التحرك في انهيار مربع 1 | التحرك في انهيار مربع 2 | التحرك في انهيار مربع 3 |
|---|---|---|
|
|
|
التسلسل
هو الترتيب المحدد الذي يتم به تنفيذ السلوكيات في خوارزمية أو مجموعة من التعليمات. يؤدي الفعل أو الحدث إلى الفعل المرتب التالي في التسلسل. التسلسل مهم حتى يتمكن الطلاب من برمجة الروبوتات الخاصة بهم بشكل صحيح.
من أجل إخبار الروبوت بكيفية التحرك بشكل دقيق وواضح، هناك حاجة إلى التحلل والتسلسل. أولاً، سيتم تقسيم المشكلة، مثل كيفية التنقل عبر المتاهة، إلى زيادات وسلوكيات أصغر. ثم، بمجرد تحديد هذه السلوكيات، يجب تنظيمها بالتسلسل الصحيح. هذا مهم، لأن الروبوت سوف يتحرك فقط بالضبط كما هو مبرمج.
سيقوم الطلاب ببرمجة عوامة العرض الخاصة بهم للتحرك عبر متاهة العرض. سوف يحتاجون إلى ترتيب الأوامر في مشروعهم بحيث تتحرك عوامتهم إلى الأمام والخلف واليسار واليمين بالترتيب الصحيح للتنقل في متاهة العرض.
ما هو VEXcode GO؟
VEXcode GO هي بيئة برمجة تستخدم للتواصل مع روبوتات VEX GO. يستخدم الطلاب واجهة السحب والإفلات لإنشاء مشاريع VEXcode GO للتحكم في تصرفات الروبوتات الخاصة بهم. يمكن تحديد غرض كل كتلة باستخدام الإشارات المرئية مثل لها شكل, اللون، والتسمية.
سيتم استخدام كتل VEXcode GO التالية في هذه الوحدة:
[قيادة] - يحرك مجموعة نقل الحركة إما للأمام أو للخلف لمسافة معينة. اختر الاتجاه الذي سيتحرك فيه نظام نقل الحركة، ثم حدد المسافة التي سيتحرك بها عن طريق إدخال قيمة في الشكل البيضاوي.

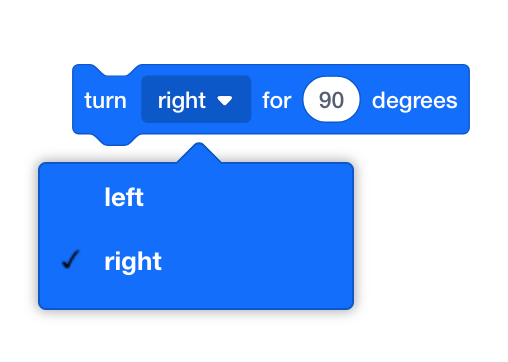
[أدر] - يدور نظام نقل الحركة إلى اليسار أو اليمين لعدد معين من الدرجات. اختر الاتجاه الذي سيتحرك فيه نظام نقل الحركة، ثم حدد المسافة التي سيتحرك بها عن طريق إدخال عدد الدرجات في الشكل البيضاوي.
[انتظار] - انتظار مدة زمنية محددة قبل الانتقال إلى الكتلة التالية.

[تعليق] - يسمح للمبرمجين بكتابة معلومات للمساعدة في وصف مشروعهم. لا تؤدي التعليقات إلى تغيير المشروع أو الكتل المحيطة به.

[الدوران] - سوف يدور المحرك في اتجاه معين لمسافة معينة من مكانه الحالي.

- بشكل افتراضي، ستنتظر الكتل الأخرى حتى ينتهي المحرك من الحركة. يمكنك تحديد السهم للتوسيع "ولا تنتظر" - سيؤدي هذا إلى استمرار تشغيل الكتل الأخرى أثناء تحرك المحرك أو مجموعة المحركات.

للبدء في استخدام VEXcode GO في الفصل الدراسي الخاص بك, قم بتنزيل تطبيق VEX Classroom على جهاز المعلم الجهاز، ثم اتبع الخطوات الموجودة في باستخدام تطبيق VEX Classroom مقالة للتعرف على كيفية تحديث GO البرامج الثابتة للدماغ، وإعادة تسمية وتحديد موقع GO Brains، ورصد بطاريات GO Brainsفي الفصل الدراسي الخاص بك. لمزيد من المعلومات حول VEXcode GO، قم بزيارة قسم VEXcode GO من مكتبة VEX Robotics VEX.