
Wiskundeondersteuning
Bij het geven van lesmateriaal in Lab 4 en 5 komen extra wiskundige concepten en berekeningen aan bod. Deze pagina biedt docenten relevante achtergrondinformatie ter ondersteuning van de wiskunde die leerlingen in deze Labs onderzoeken.
Wiskunde van het autorijden
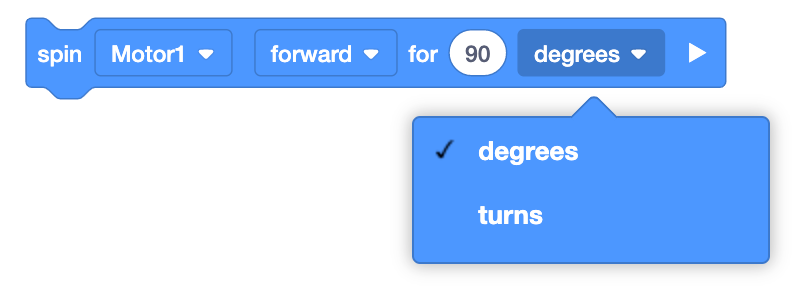
Om de parade in Lab 4 te voltooien, rijden de leerlingen met hun Code Base-wagen een stuk in een rechte lijn langs de route. In plaats van aandrijflijnblokken die beide wielen tegelijkertijd laten bewegen, gebruiken studenten de [Spin for]-blokken in VEXcode GO, zoals hier getoond, om de motoren die aan de wielen zijn bevestigd te laten draaien en de robot vooruit te laten bewegen. [Spin for] blokken accepteren 'beurten' of 'graden' als parameters. In Lab 4 berekenen leerlingen het aantal bochten dat ze in het project moeten invoeren om hun robot over de hele route van de parade te laten rijden.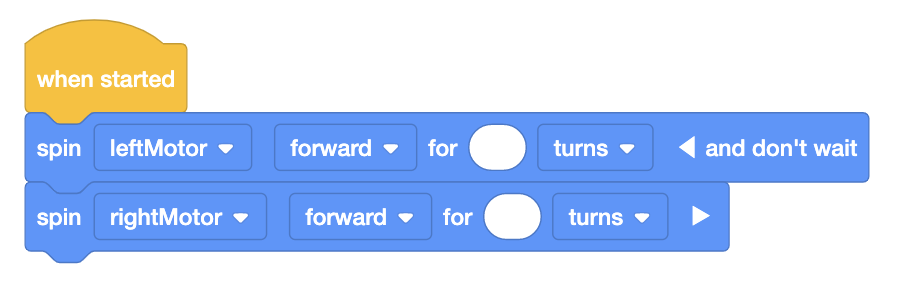
Bekijk de onderstaande video om te leren hoe u het aantal wielomwentelingen berekent dat nodig is om uw robot een bepaalde afstand rechtdoor te laten rijden.
Nuttige referenties:
Terminologie en waarden voor de grijze wielen:
| Looptijd | Definitie | Visueel | Formule | Waarde |
|---|---|---|---|---|
| Diameter | Meting van een rechte lijn over het midden van een cirkel | 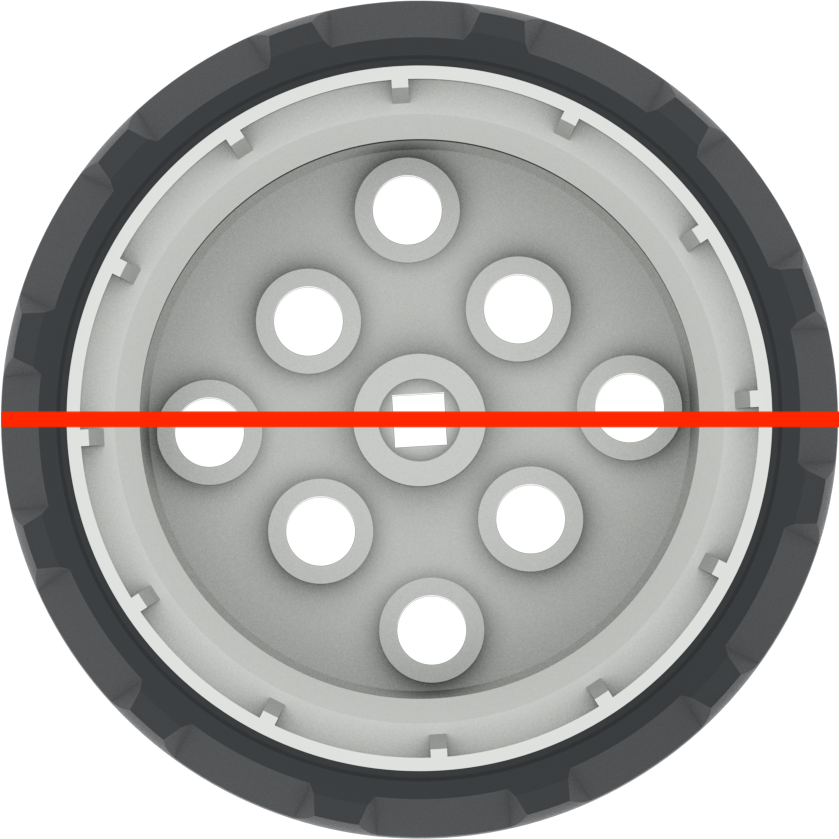 |
d = 2 r | ~ 50,93 mm of 2 inch |
| Omtrek | De totale afstand rond de buitenkant van een cirkel |  |
C = π d | ~ 160 mm of 6,25 inch |
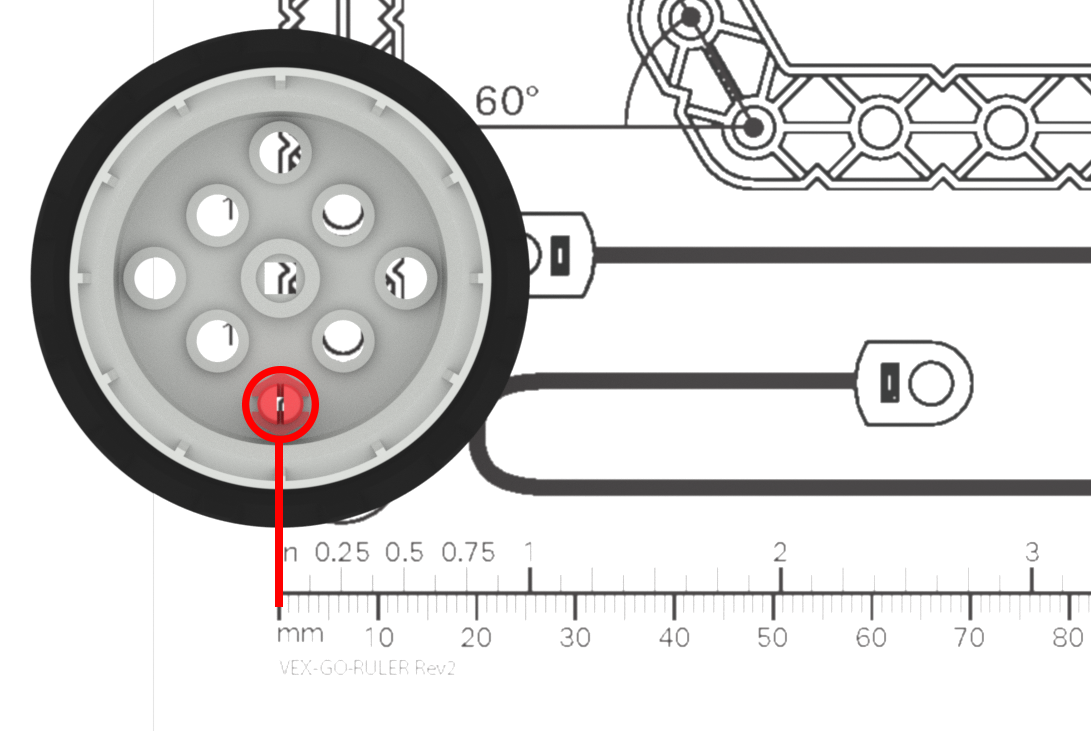
Nauwkeurig meten
Wanneer studenten meten, zorg er dan voor dat je ze begeleidt om zorgvuldig en nauwkeurig te meten. You can use the VEX GO Printable Ruler for students to measure, or classroom rulers.
- Herinner de leerlingen eraan om te beginnen met meten vanaf het nulpunt op de liniaal en let goed op het eindpunt van het object dat ze meten. Het onnauwkeurig starten of beëindigen van hun metingen heeft invloed op hun berekeningen en de uiteindelijke beweging van hun robot.
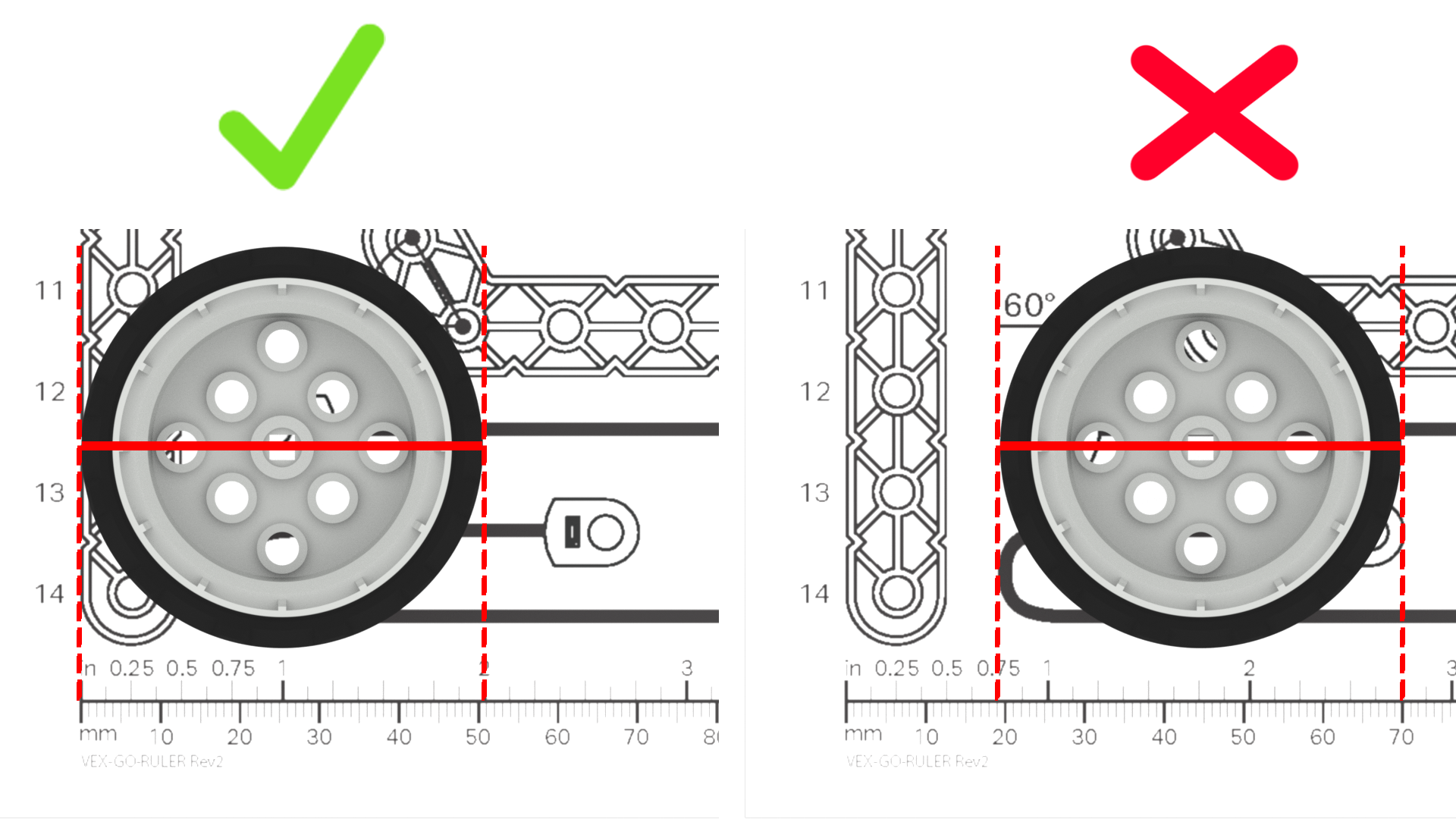
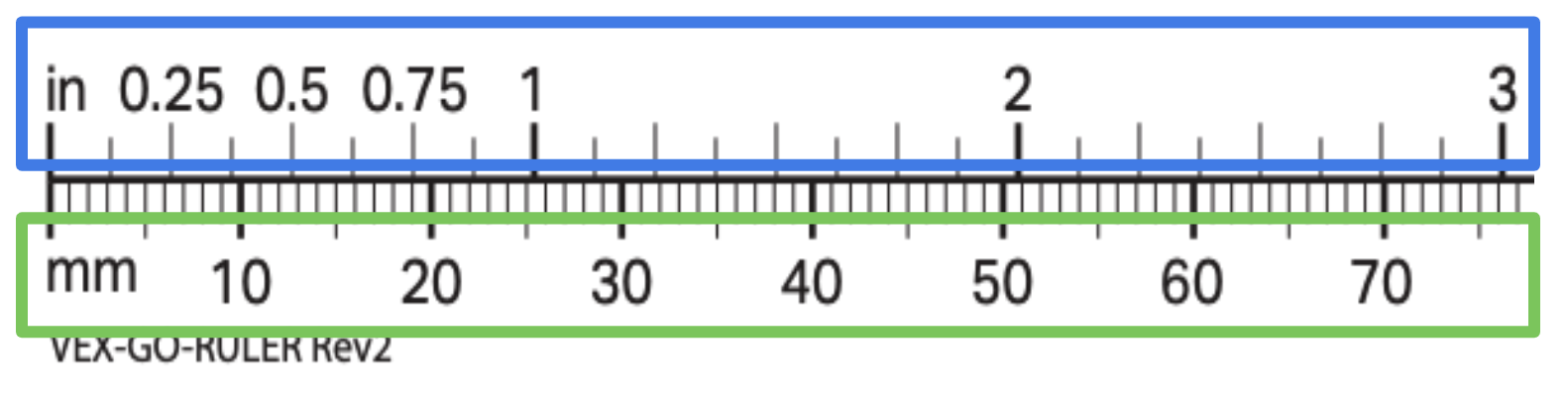
- Zorg ervoor dat studenten weten hoe ze de markeringen op de liniaal die ze gebruiken moeten lezen, zodat ze nauwkeurig kunnen meten. Als de linialen die je gebruikt zowel imperiale als metrische eenheden hebben (zoals de VEX GO afdrukbare liniaal), zorg er dan voor dat studenten consequent dezelfde maateenheden gebruiken.
- Studenten kunnen hun metingen afronden op de dichtstbijzijnde eenheid, of fractie van een eenheid. Afronding kan berekeningen eenvoudiger maken, indien nodig; maar kan ook metingen minder nauwkeurig maken. Je kunt studenten bijvoorbeeld instrueren om af te ronden naar de dichtstbijzijnde halve inch of centimeter, maar hun robot beweegt iets verder dan oorspronkelijk de bedoeling was. Als alternatief kun je studenten tot op de dichtstbijzijnde centimeter of millimeter laten meten en merken dat hun robots dichter bij de beoogde afstand komen.
- Als studenten extra moeten oefenen met meten, kun je de Oefening VEX GO-activiteit met individuele studenten of groepen gebruiken, of als een hele klasactiviteit.
Wiskunde van 360° draaien
Om de parade in Lab 5 te voltooien, rijden studenten met hun Code Base-float langs een paraderoute met een bocht.
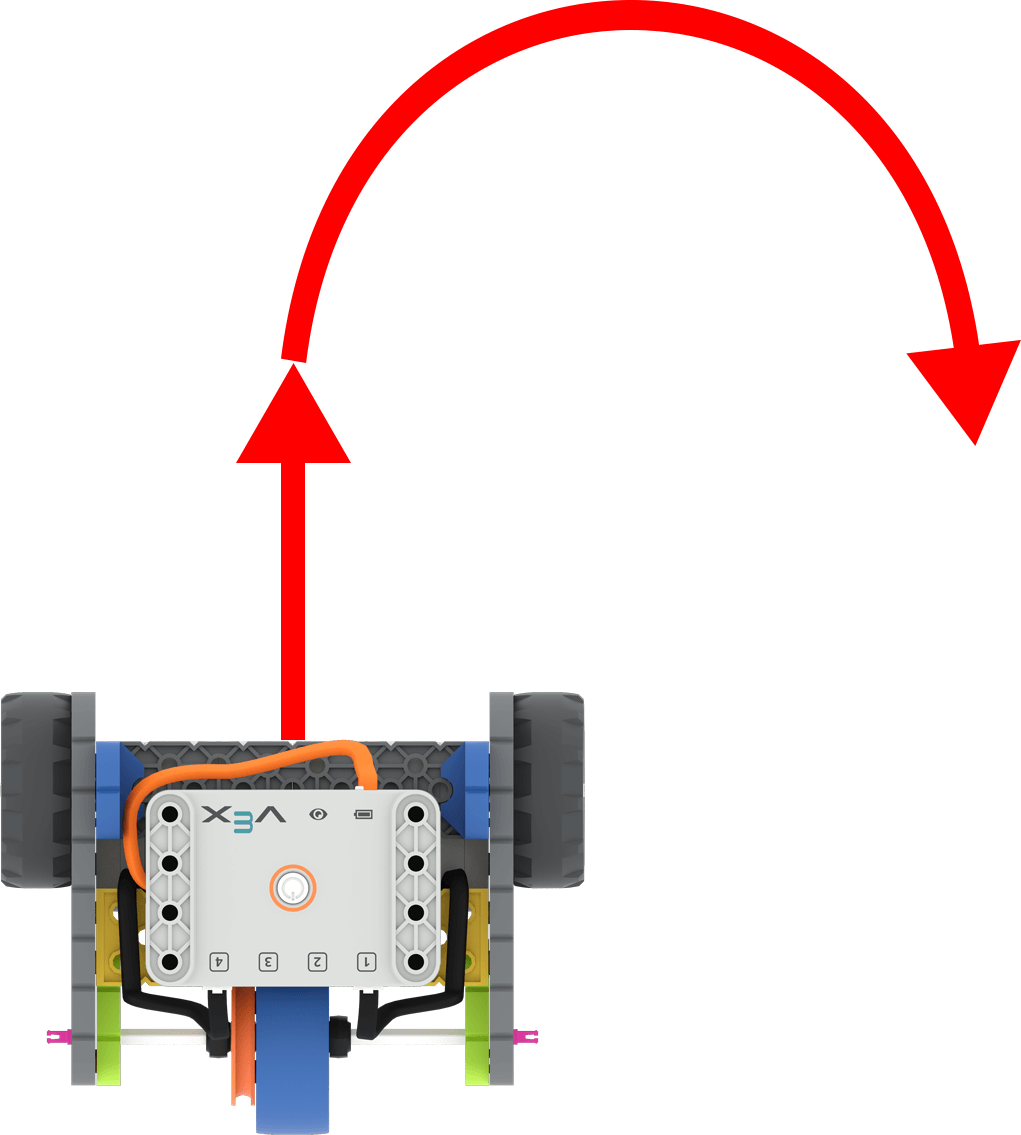
Code Base met pijlen om vooruit te rijden en vervolgens naar rechts te draaien
Studenten zullen voortbouwen op wat ze hebben geleerd over het coderen van de robot om een rechte lijnafstand af te leggen, om de robot te coderen om een niet-lineaire afstand of een bocht te rijden. Studenten zijn nog steeds bezig met het berekenen van het aantal beurten dat nodig is om een bepaalde afstand af te leggen, dus ze zullen dezelfde formule gebruiken als in het vorige lab.
Bekijk de onderstaande video om te leren hoe u het aantal draaiingen van het wiel kunt berekenen dat nodig is om de robot met uw leerlingen 360° te laten draaien.
Nuttige referenties:
Wanneer de codebasis draait, bewegen de aandrijfwielen in tegengestelde richting om de robot te draaien. Om de robot bijvoorbeeld naar rechts te draaien, rijdt het linkerwiel vooruit, terwijl het rechterwiel achteruit rijdt.
Terminologie en waarden voor de codebasis:
| Looptijd | Definitie | Visueel | Formule | Waarde |
|---|---|---|---|---|
| Diameter | Meting van een rechte lijn vanuit het midden van elk wiel (ook bekend als de wielbasis) |  |
d = 2 r | ~ 135 mm of 5,3 inch |
| Omtrek | De totale afstand die door de wielen wordt afgelegd om een 360° |  |
C = π d | ~ 424 mm of 16,7 inch |
Wiskunde van het draaien van elke graad
Bekijk deze video voor meer informatie over het berekenen van het aantal wielbewegingen dat de robot nodig heeft om een willekeurige graad te draaien.
Converteren naar graden
Het [Spin for]-blok accepteert beurten of graden als parameters. Om graden te gebruiken, vermenigvuldigt u gewoon het aantal beurten met 360. Dit voorbeeld laat zien hoeveel graden de motoren moeten draaien om de robot° te laten draaien. Houd er rekening mee dat in dit project de motoren in tegengestelde richting draaien en dat 'en wacht niet' aan het eerste blok is toegevoegd, zodat de motoren gelijktijdig draaien. Hiermee wordt de robot naar rechts gedraaid voor de gewenste 360°. 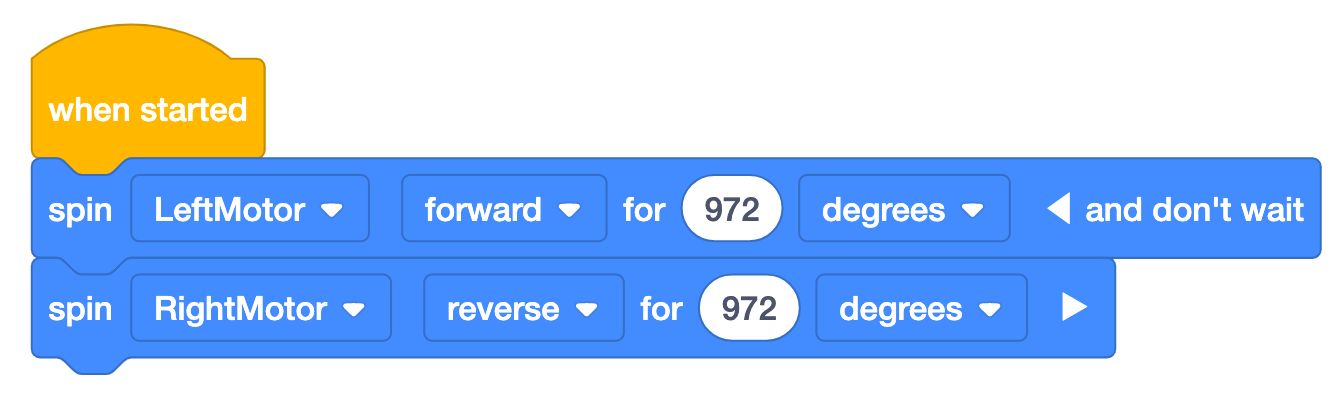
Veelvoorkomende misvattingen
Er zijn verschillende misvattingen die studenten kunnen hebben over meten en de wiskunde van autorijden en draaien. Hieronder vindt u enkele van de meestvoorkomende problemen, met daarbij suggesties voor hoe u deze met uw leerlingen kunt bespreken.
| Situatie | Misvatting | Voorgestelde correctie |
|---|---|---|
|
De leraar vraagt de klas, wat moeten we invoeren in het [Spin for] -blok om de robot 90° te laten draaien? Student antwoordt “90”. |
De afstand in graden die het wiel drijft om een bocht te maken is gelijk aan de draaihoek. Studenten gebruiken de draaicirkel van de robot niet om de afstand te berekenen in graden die het wiel moet rijden. |
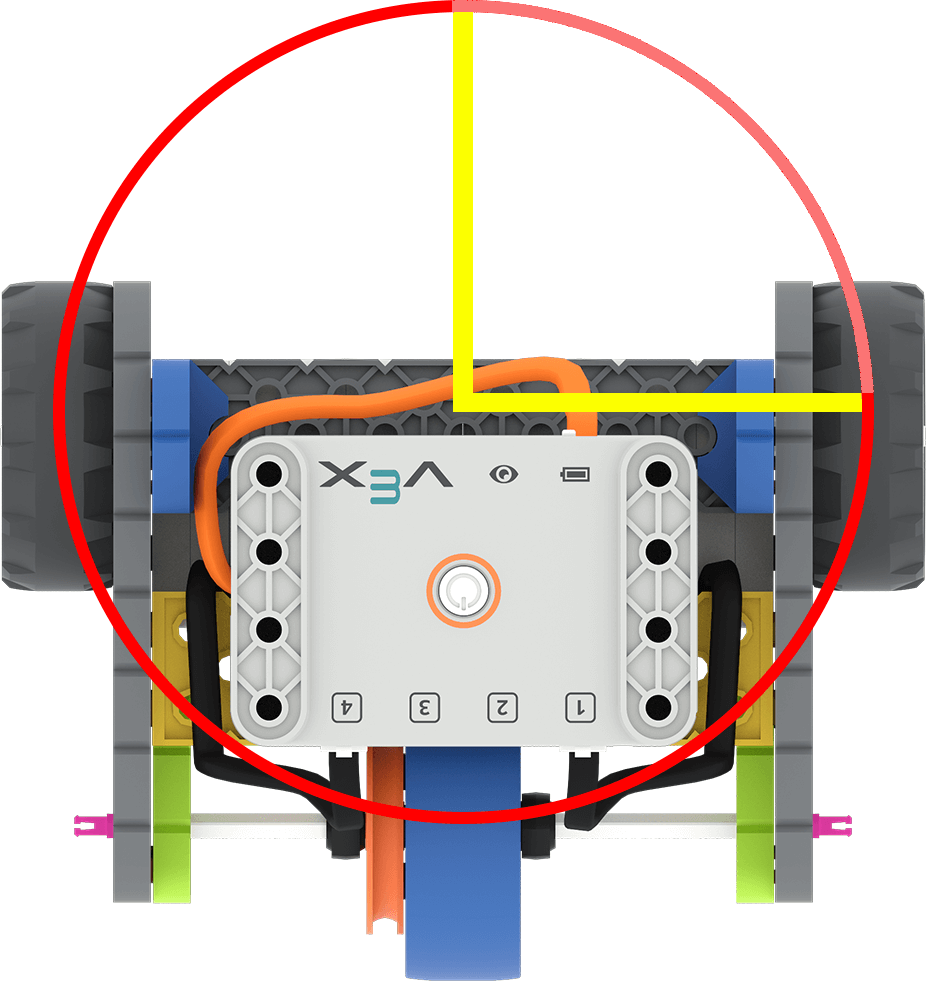
Herinner leerlingen eraan dat de wielen langs de draaicirkel moeten rijden, zodat de robot kan draaien. (In deze afbeelding is dat langs de rode cirkel van de ene gele lijn naar de andere.)
Draai het wiel zelf slechts 90°, om studenten te helpen visualiseren hoe ver het wiel draait om een bepaalde afstand af te leggen. |
|
De leraar vraagt de klas, wat moeten we invoeren in het [Spin for] -blok om de robot 12 centimeter naar voren te laten rijden? Student antwoordt “12”. |
Het aantal omwentelingen van het wiel is gelijk aan de gewenste rijafstand. De student gebruikt de wielomtrek niet om het aantal wielbewegingen te berekenen om de gewenste afstand te rijden. |
Herinner studenten eraan hoe ver de robot beweegt met 1 draai aan het wiel en vraag of 12 te veel of te weinig complete bochten lijkt om 12 inch te rijden. Om studenten te helpen dit beter te visualiseren, rol je een wiel langs een liniaal gedurende 12 wielbewegingen, om studenten te laten zien hoe ver die afstand is.
Herinner studenten eraan dat 1 wieldraai de wielomtrek is en dat 12 inch door die omtrek moet worden gedeeld. |
| Student meet het wiel, maar geen van beide randen van het wiel staat op het nulpunt van de liniaal. |
De liniaal begint bij 1, niet bij nul. De student gebruikt de liniaal niet correct om een nauwkeurige meting te krijgen. |
Herinner studenten eraan dat de liniaal begint bij het ‘0’ -teken en dat als ze vanaf dat punt niet meten, hun metingen onjuist zullen zijn. U kunt het begin van de liniaal markeren met tape of een gekleurde marker, als een extra visueel hulpmiddel voor studenten terwijl ze aan het werk zijn. (Voor extra oefening met meten kunnen leerlingen de Oefenmeetactiviteit invullen.) |
|
Een student zegt dat zijn project niet werkt. De leerkracht merkt dat het juiste aantal wielbewegingen in het blok [Spin for] staat, maar de parameter is ingesteld op ‘degrees’. |
Eenheden of parameters zijn uitwisselbaar. De studenten letten niet op de parameters/maateenheden in hun project. |
Vraag studenten welke maateenheid ze gebruiken en of die overeenkomt met de parameter in het blok.
|
| Een student probeert ‘21/4‘ in te voeren in de parameter van het blok [Spin for], om '2 ¼ beurten' in te voeren. |
Breuken en decimalen worden op dezelfde manier geschreven. De student converteert de breuk niet naar een decimaal. |
Herinner studenten eraan dat ze breuken naar decimalen moeten converteren om herkenbare parameters te zijn. Om dit te doen, deelt u de teller door de noemer. 2 ¼ = 94 = 2,25 U kunt uw leerlingen vaak gebruikte breukwaarden en hun decimale equivalenten in een grafiek laten zetten om hun eigen bron te maken. |
|
Leraar vraagt de leerlingen om hun wielomtrekberekening te delen. Studenten antwoorden |
Omtrek wordt berekend met behulp van de straal -πxstraal. De student gebruikt de verkeerde meting in de berekening. |
Herinner de leerlingen eraan dat de omtrekπ x diameteris; en dat de diameter een rechte lijn is die door het midden van het wiel loopt (of twee keer de straal). U kunt de waarde meten en berekenen als een activiteit met de hele klas als veel leerlingen moeite hebben met het gebruik van de formules. |
 Herinner studenten eraan dat hun berekeningen alleen werken zoals bedoeld als de parameter is ingesteld op de juiste eenheid. Draaien en graden zijn niet dezelfde waarde.
Herinner studenten eraan dat hun berekeningen alleen werken zoals bedoeld als de parameter is ingesteld op de juiste eenheid. Draaien en graden zijn niet dezelfde waarde.
Voorbeeldoplossingen
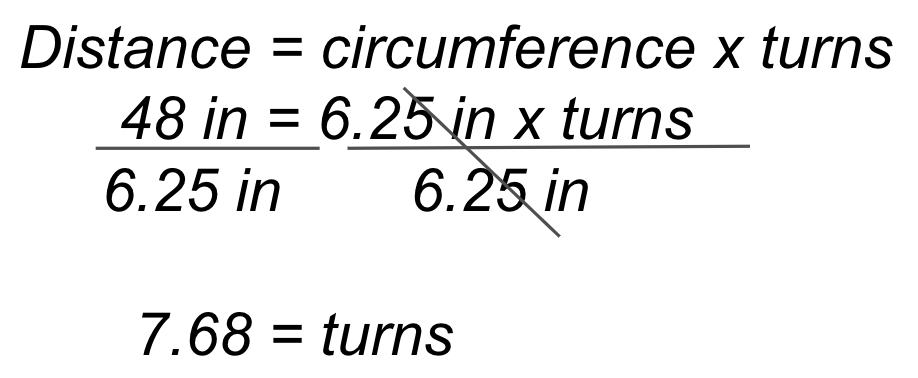
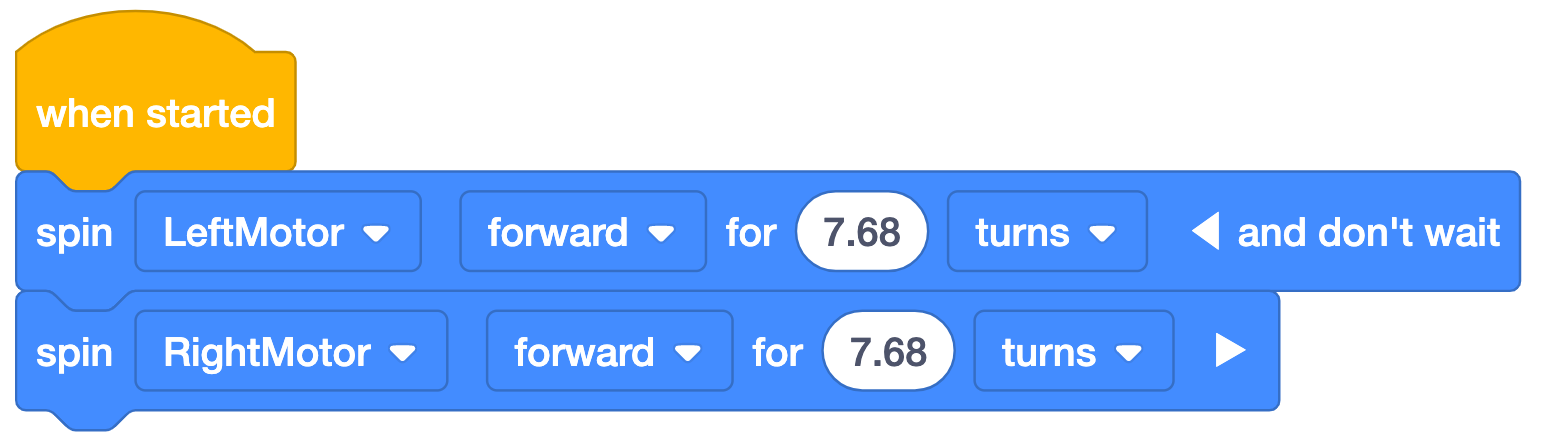
Lab 4 Voorbeeldoplossing
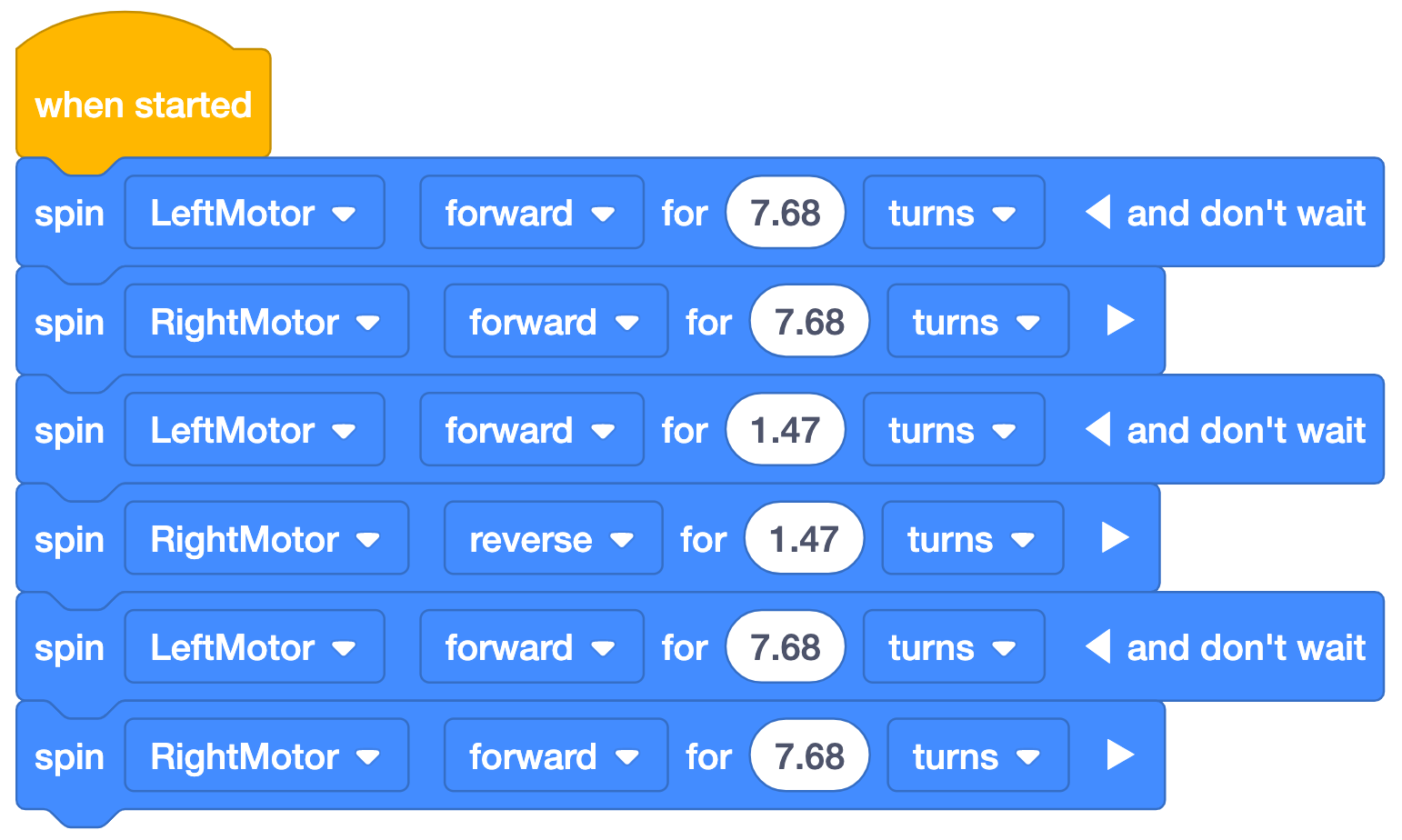
*Let op: 'and don't wait' wordt gebruikt bij het eerste blok in het voorbeeldproject, zodat beide blokken gelijktijdig worden uitgevoerd. Zonder ‘en wacht niet’ zou de eerste motor draaien, dan de tweede, en zou de Code Base niet rijden zoals bedoeld. Zorg ervoor dat studenten 'NIET instorten en niet wachten', anders loopt hun project niet zoals bedoeld.

Om de 48 inch (~122 cm) lengte van de paraderoute te rijden, moet de codebasis ~7,68 bochten afleggen. De berekening wordt links weergegeven en de voorbeeldoplossing van VEXcode GO rechts.
Lab 5 Voorbeeldoplossing
Om de 48 inch (~122 cm) lengte van de paraderoute te rijden en 180 graden te draaien, moet de codebasis ~7,68 bochten vooruit rijden, dan één motor vooruit draaien en de andere achteruit voor ~ 1,47 bochten. De berekening wordt getoond naast het voorbeeld VEXcode GO oplossing aan de rechterkant.
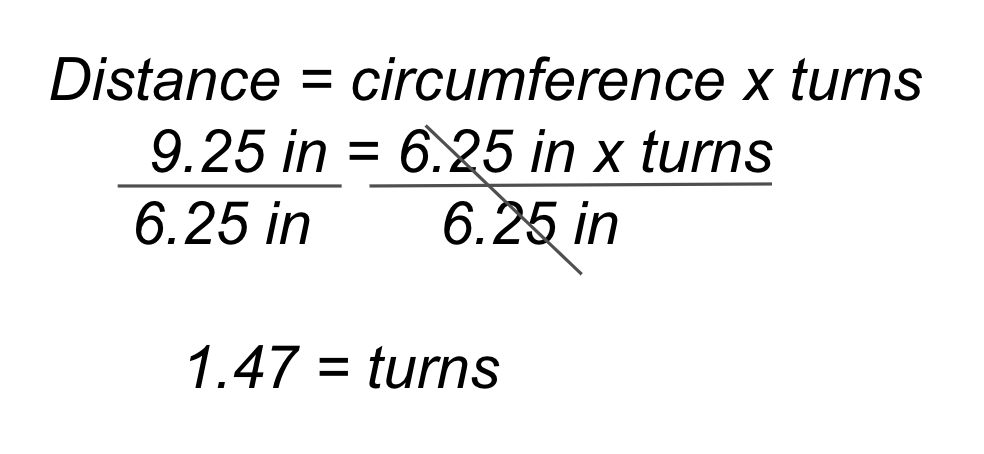
Let op: Als u graden in plaats van bochten wilt gebruiken, vermenigvuldigt u de bochtberekening met 360.
Verlenging Parade Route
Als leerlingen een extra uitdaging nodig hebben, kun je de paraderoute op veel verschillende manieren verlengen. Dit is een voorbeeld, met een mogelijke oplossing.
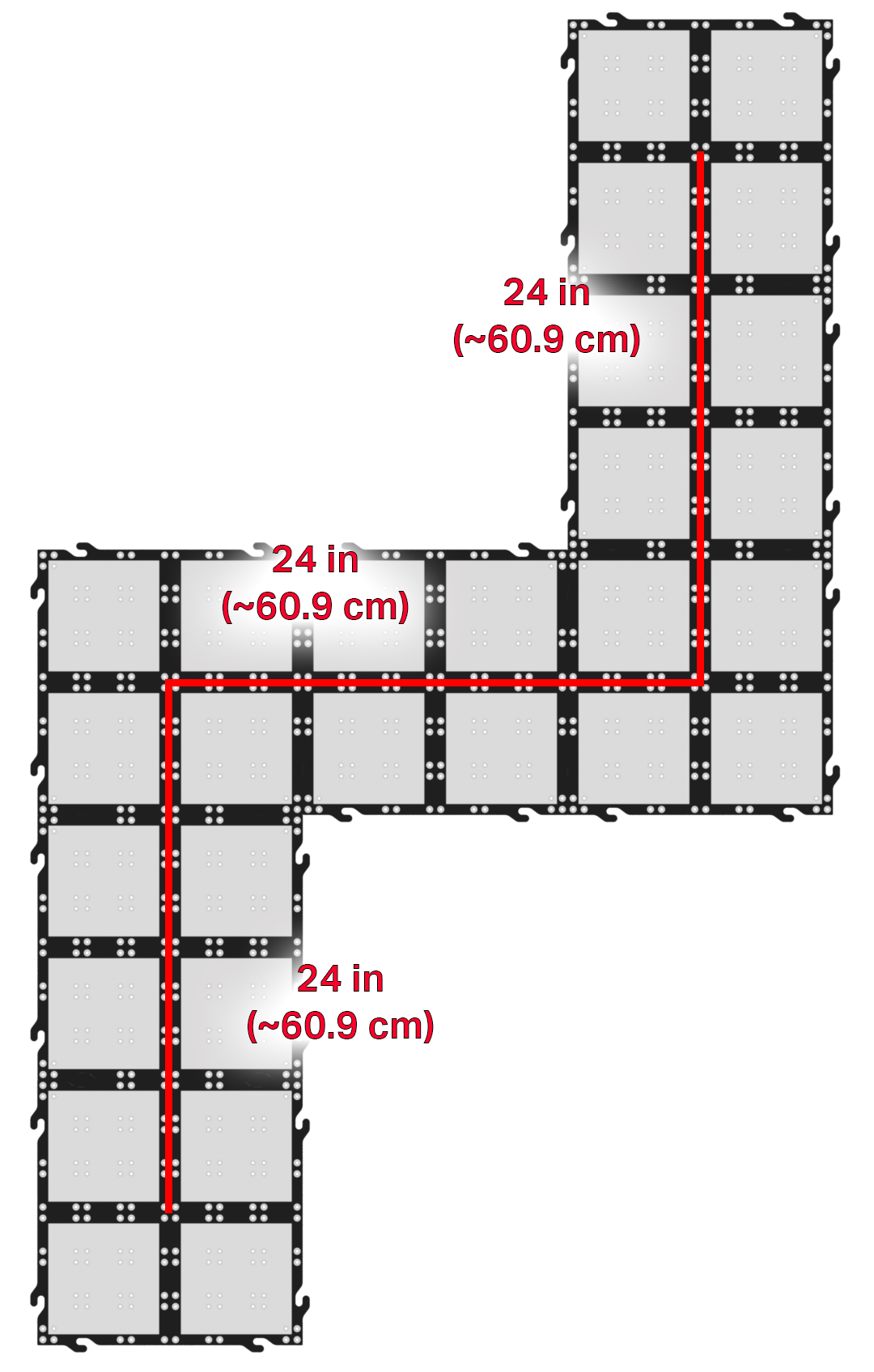
In deze voorbeeldroute worden de rijafstanden en bochten vanuit de Labs gehalveerd. In deze route is de richting van de bochten echter van belang. Naast het opnieuw berekenen moeten leerlingen ook de richting bepalen waarin ze de wielen moeten draaien om ze in de gewenste richting te laten draaien.
De gehalveerde berekeningen uit eerdere Labs zijn als volgt:
Rijafstand = ~ 3,84 omwentelingen
Draaiafstand = ~ 0,73 omwentelingen
Deze waarden worden gebruikt in het volgende voorbeeld VEXcode GO-oplossing:
