
Achtergrond
In deze codeereenheid leren studenten hoe ze met VEXcode GO en de Code Base-robot kunnen werken om authentieke uitdagingen voor codeerrobots op de werkplek op te lossen. Studenten leren hoe ze VEXcode GO-projecten kunnen plannen, maken en starten met de Code Base-robot, op basis van vier realistische scenario's.
Wat voor soort werk doen robots?
Robots kunnen werk doen dat te vies, saai of gevaarlijk is voor mensen. Veel van deze banen worden ook nog eens slecht betaald. Mensen brengen bijvoorbeeld hun leven in gevaar bij het uitvoeren van taken zoals het blussen van branden of het duiken op grote diepte in de oceaan. Robots beschikken over de hardware om in dit soort omgevingen te kunnen functioneren. Hierdoor zijn ze een geschiktere en veiligere keuze. Industrieën zetten robots in op de werkvloer om vuile, saaie of gevaarlijke taken uit te voeren en zo mensen te beschermen. Tegelijkertijd houden ze zo meer personeel over dat aan complexere of interactieve processen kan werken. Mensen hebben nog steeds genoeg te doen als robots deze vuile, gevaarlijke en saaie taken overnemen. Technologische vooruitgang heeft in de loop van de geschiedenis van de industrie veranderingen teweeggebracht. Robots vormen daarop geen uitzondering.

Elke les in deze module onderzoekt een realistisch scenario waarin robots vuile, gevaarlijke en saaie taken uitvoeren in verschillende sectoren. Studenten kunnen innovatieve probleemoplossers worden door oplossingen te bedenken voor echte uitdagingen, zoals het programmeren van robots om vuile, saaie en gevaarlijke taken uit te voeren. Met behulp van VEX GO Kits analyseren leerlingen de mogelijkheden van de Code Base-robot om te bewegen met behulp van VEXcode GO. Deze kennis gebruiken ze om te brainstormen over verschillende taken, scenario's of problemen die kunnen worden opgelost met behulp van de Code Base-robot.
Vuile banen
Vuil werk is onhygiënisch en gevaarlijk werk dat schadelijk kan zijn voor de gezondheid van de mens. Robots kunnen deze ongunstige taken uitvoeren en de blootstelling van mensen aan onhygiënische omstandigheden beperken. Bekijk de onderstaande video voor een voorbeeld van een robot die werkt in een vuile tunnel.
Robots worden ingezet bij vuile klussen, zoals het opsporen van mijnen en het verkennen van riolen. Wanneer er een probleem is met een rioolbuis, wordt deze door een ploeg afgesloten, wordt er gegraven om toegang tot de buis te krijgen en wordt de infrastructuur gerepareerd. Maar een robot kan leidingen schoonmaken, in kaart brengen en inspecteren voordat er problemen ontstaan.
Saaie banen
Banen waarbij taken zich herhalen en waarbij weinig menselijk nadenken nodig is, worden als saai beschouwd. Vaak omvatten ze processen die enkel gericht zijn op efficiëntie en output. Robots kunnen dag en nacht doorwerken om saaie taken te stroomlijnen. Zo komt er menselijk kapitaal vrij voor taken met afwisseling, waarbij kritisch denken essentieel is.

Door de groei van e-commerce is er bijvoorbeeld een toenemende behoefte aan distributiecentra. Robots verkorten de doorlooptijd van bestelling tot levering, verminderen fouten en verminderen de werklast van menselijke werknemers.
Gevaarlijke banen
Gevaarlijke beroepen brengen mensen in gevaarlijke situaties. Robots kunnen bij dit soort taken worden ingezet om letsel te voorkomen. Robots kunnen bommen onschadelijk maken, verre planeten doorkruisen, instabiele structuren inspecteren en helpen bij het blussen van branden. Robots vervangen de mens niet per se, maar ze kunnen wel geprogrammeerd of op afstand bestuurd worden, waardoor werknemers uit de gevaarlijkste situaties worden gehouden.

Robots kunnen brandweerlieden helpen bij het beoordelen van brandende gebouwen. De SmokeBot maakt plattegronden van het interieur, die brandweerlieden later kunnen gebruiken om de weg te vinden in een brandend gebouw. De Thermite Robot heeft een slang die 1.893 liter (~500 gallons) water per minuut kan pompen. De Thermite Robot maakt gebruik van gemonteerde camera's. Hierdoor kan hij zelfs bij zeer gevaarlijke branden worden bestuurd vanaf een afstand van wel 400 meter.
Wat is een aandrijflijn?
Met een aandrijflijn kan een robot vooruit, achteruit, naar links of naar rechts bewegen met behulp van wielen of andere methoden.
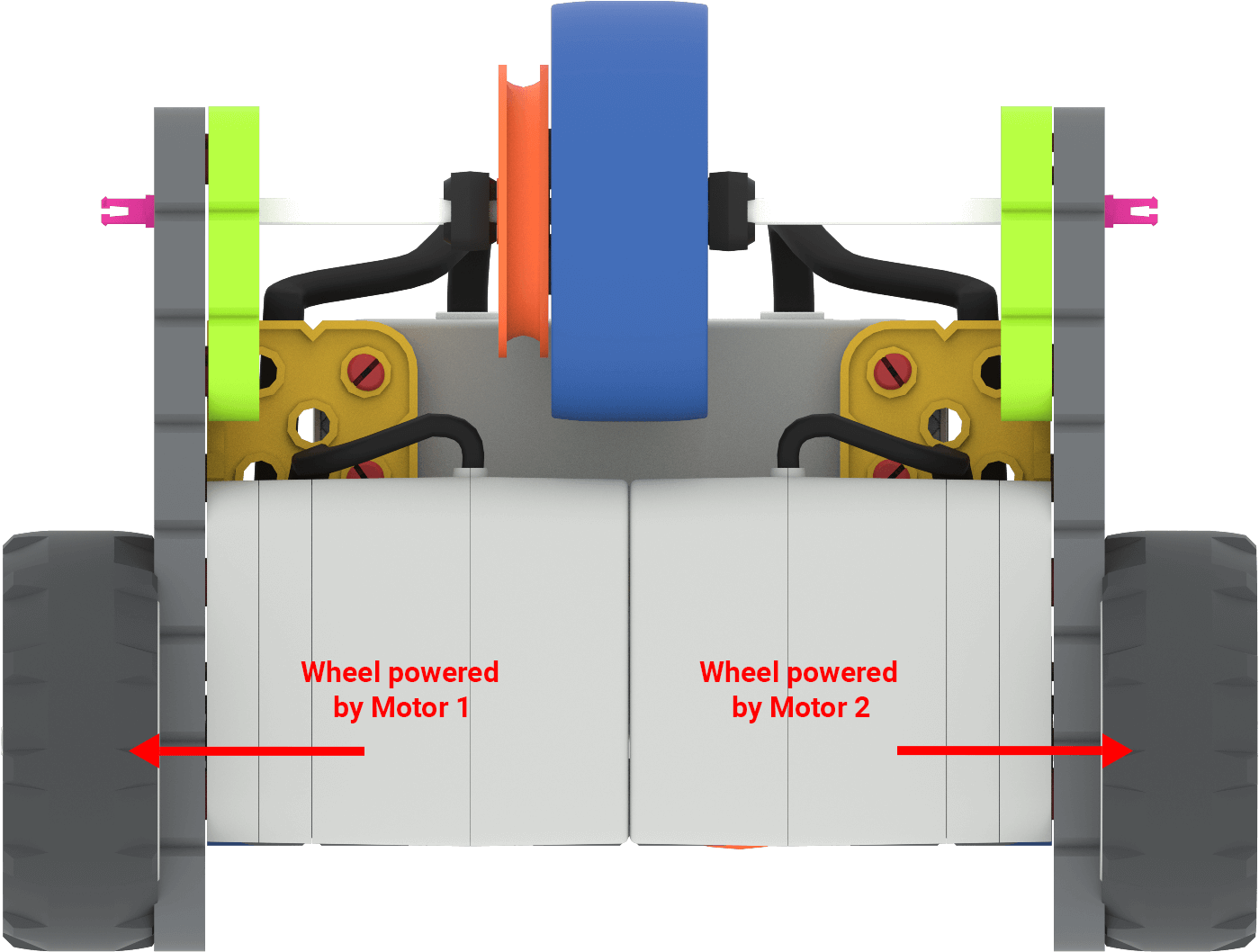
De Code Base-robot heeft een aandrijflijn met 2 motoren, omdat er twee motoren (één aan de linkerkant en één aan de rechterkant) zijn die worden aangedreven. Hoewel de Code Base-robot vier wielen heeft, worden er slechts twee aangedreven door een motor. De blauwe wielen zorgen ervoor dat de Code Base-robot stabiel blijft, zodat hij niet omvalt. Kunt u zich voorstellen wat er zou gebeuren als de Code Base zich met slechts twee wielen zou voortbewegen? De kans is groot dat de auto omvalt zodra hij vooruit of achteruit rijdt.
Hoe draait de codebasisrobot met behulp van een aandrijflijn?
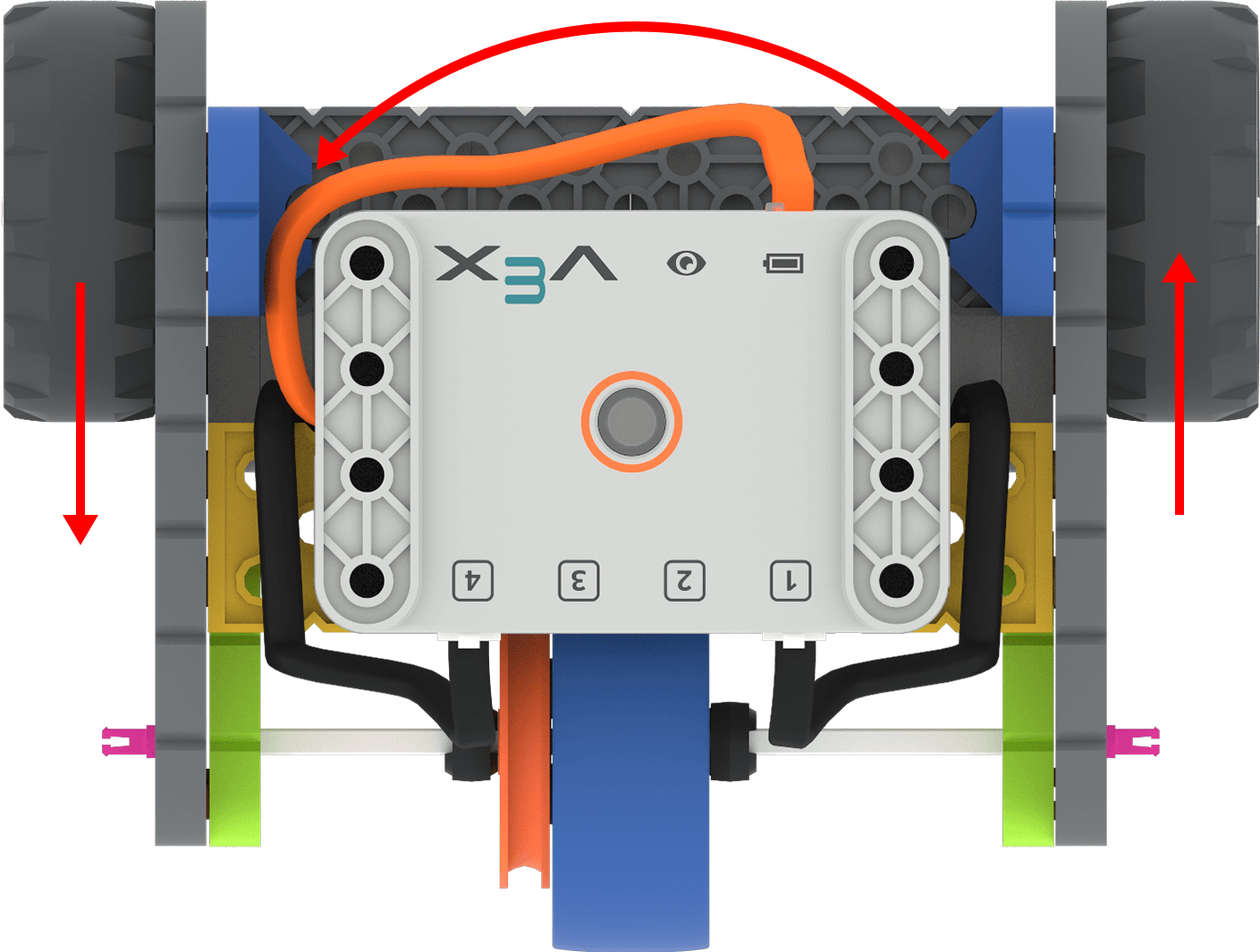
De Code Base-robot maakt bochten door de wielen in tegengestelde richting te laten draaien. Om een links bocht te maken, draait het linkervoorwiel van de Code Base-robot achteruit, terwijl het rechtervoorwiel vooruit draait.
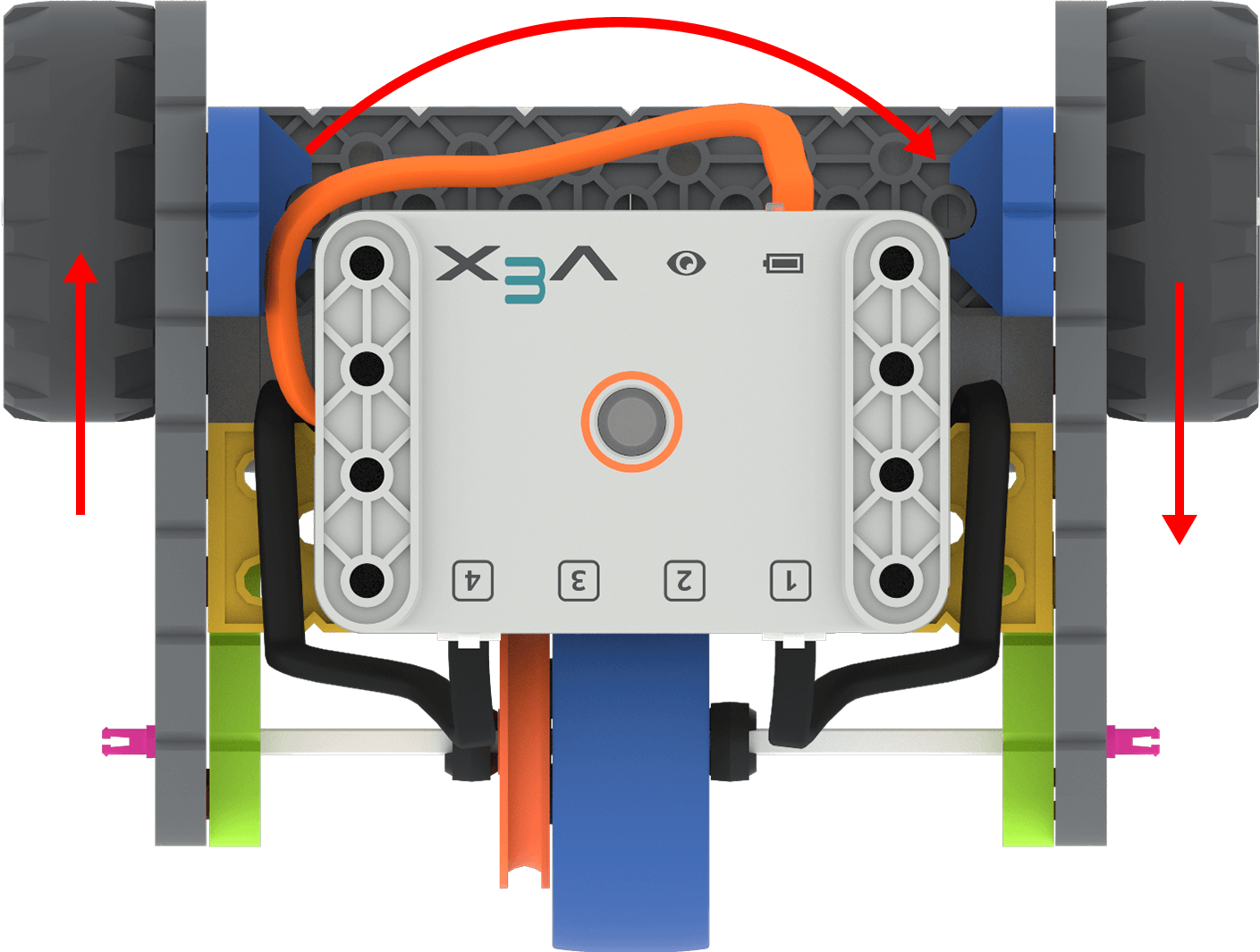
Om een rechts bocht te maken, zal het linkervoorwiel van de Code Base-robot vooruit draaien, terwijl het rechtervoorwiel achteruit zal draaien.
Wat is VEXcode GO?
VEXcode GO is een codeeromgeving die wordt gebruikt om te communiceren met VEX GO-robots. Studenten gebruiken de drag-and-dropinterface om VEXcode-projecten te maken waarmee ze de acties van hun robots kunnen aansturen. Het doel van elk blok kan worden geïdentificeerd aan de hand van visuele aanwijzingen, zoals de vorm , de kleur en het label.
In deze unit worden de volgende VEXcode-blokken geïntroduceerd:
{When started} - start de bijgevoegde stapel blokken wanneer het project wordt gestart.
 |
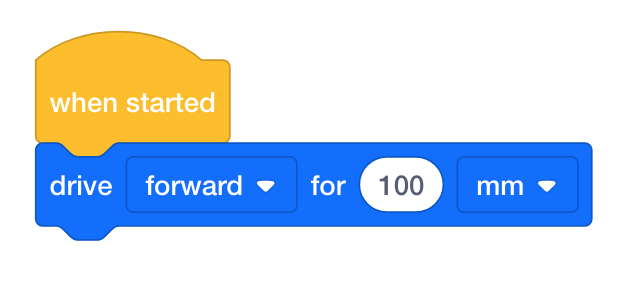 |
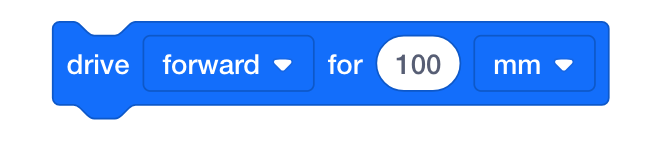
[Rijden voor] - beweegt de aandrijflijn vooruit of achteruit over een bepaalde afstand. Kies de richting waarin de aandrijflijn moet bewegen en stel in hoe ver deze moet bewegen door een waarde in te voeren in het ovaal.
 |
 |
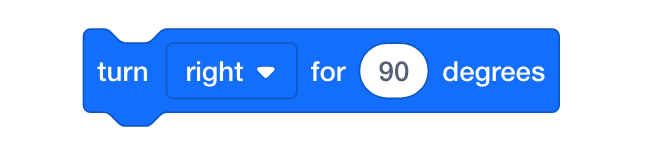
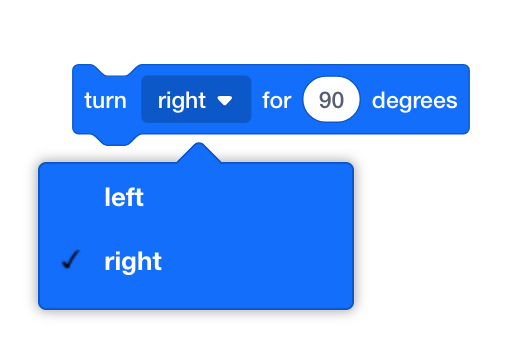
[Draaien voor] - draait de aandrijflijn een bepaald aantal graden naar links of rechts. Kies de richting waarin de aandrijflijn moet draaien en stel in hoe ver deze moet bewegen door een aantal graden in te voeren in het ovaal.
 |
 |
Wat zijn decompositie en sequentie in programmeren?
Om een robot precies te kunnen vertellen hoe hij moet bewegen, zijn zowel decompositie als sequentie nodig. Eerst wordt het probleem, bijvoorbeeld hoe om te gaan met een uitdaging, opgedeeld in kleinere stappen en gedragingen. Zodra deze gedragingen zijn geïdentificeerd, moeten ze in de juiste volgorde worden gezet. Dit is belangrijk, omdat de robot alleen precies zo beweegt als is geprogrammeerd.
Ontleding
Bij decompositie wordt een complex probleem opgedeeld in gedragingen die beter beheersbaar en gemakkelijker te begrijpen zijn. Door het probleem op te delen in kleinere onderdelen, kan elk onderdeel gedetailleerder worden onderzocht en gemakkelijker worden opgelost. Als een student bijvoorbeeld wil dat zijn robot in een vierkant beweegt, moet hij de opdracht opsplitsen in kleinere opdrachten. Het is belangrijk dat leerlingen het opsplitsingsproces verfijnen, omdat ze de opdrachten in eerste instantie misschien nog niet in kleinere onderdelen kunnen opsplitsen:
| Beweeg in een vierkante verdeling 1 | Verplaats in een vierkante verdeling 2 | Verplaats in een vierkante verdeling 3 |
|---|---|---|
|
|
|
Sequentiebepaling
Sequentie is de specifieke volgorde waarin gedragingen worden uitgevoerd. Een actie of gebeurtenis leidt tot de volgende actie in een reeks. Sequentie is belangrijk zodat leerlingen hun robots zo kunnen programmeren dat ze een taak correct uitvoeren.
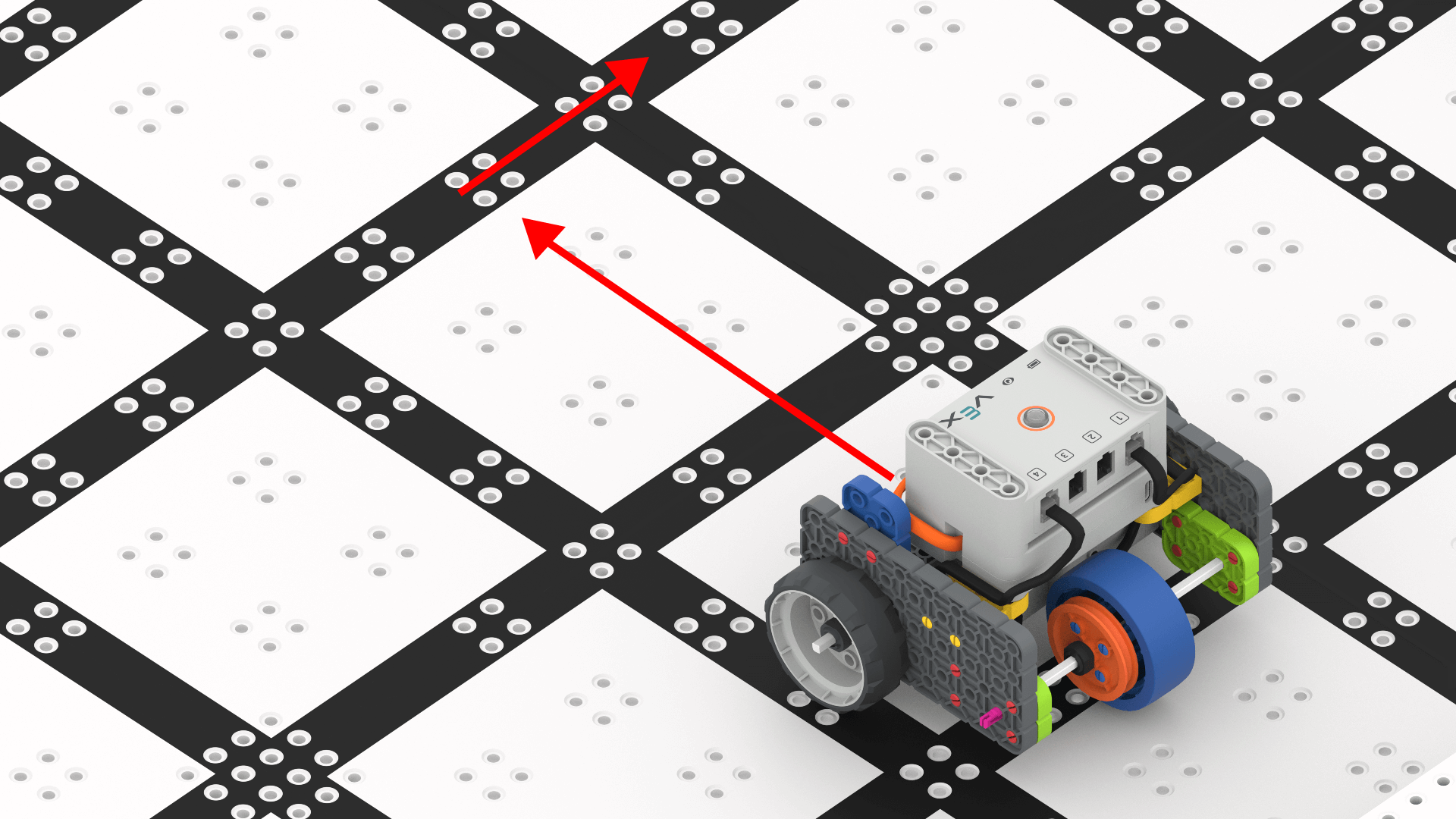
Studenten programmeren hun Code Base-robot om verschillende taken uit te voeren die lijken op de echte taken die robots uitvoeren. Ze moeten de opdrachten in hun programma zo ordenen dat hun Code Base-robot in de juiste volgorde vooruit, achteruit, naar links en naar rechts beweegt om de uitdagingen aan te kunnen.
- Vooruitgaan
- Ga rechtsaf
- Vooruitgaan
VEX GO-stukken
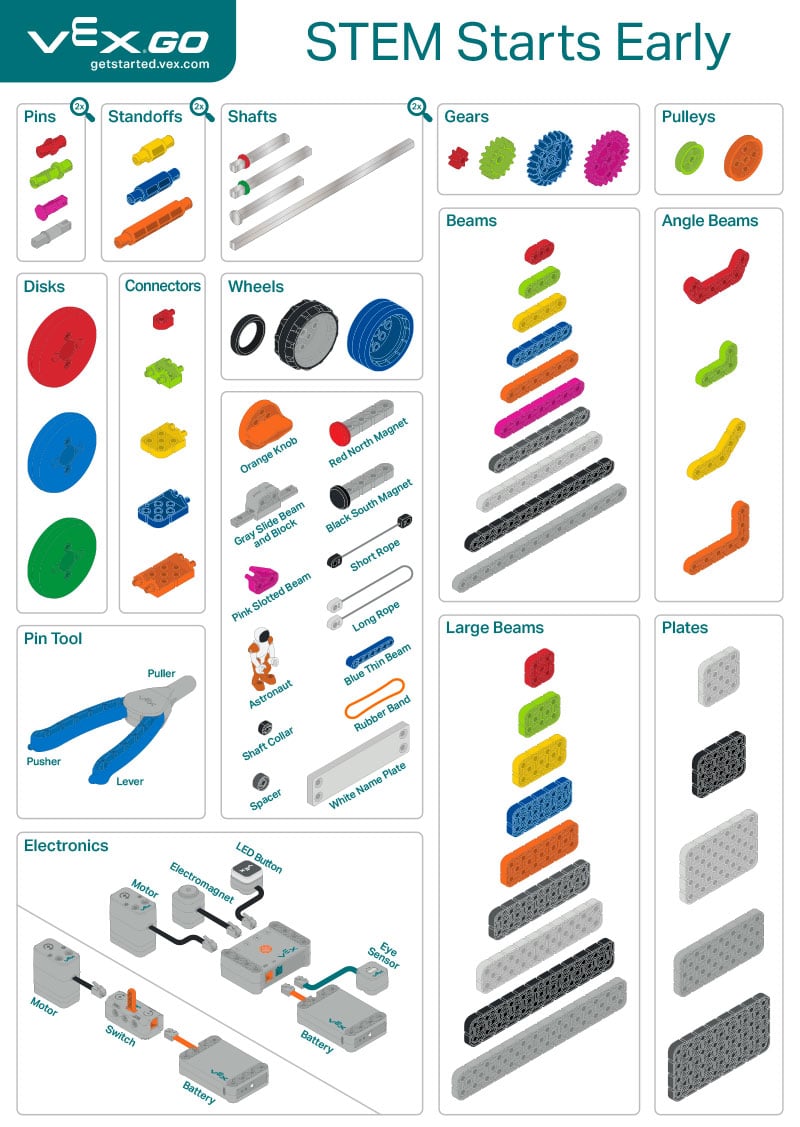
De volgende VEX GO-onderdelen zijn essentiële onderdelen van de Code Base-robotbouw. De VEX GO-poster illustreert alle VEX GO-onderdelen en organiseert ze volgens hun functie in een bouwwerk. Meer informatie over de VEX GO-onderdelen vindt u in het artikel onderdelen in de VEX GO Kit VEX-bibliotheek.
Elektronica
Elektronische componenten worden gebruikt om de bouwfuncties van de VEX GO aan te drijven en te besturen.
De batterij is essentieel voor elke VEX GO-build met elektronica. De batterij levert stroom aan de elektronische componenten van de VEX GO.
De Brain is essentieel voor elke VEX GO-build die wordt gestart door een VEXcode GO-project. De Brain voert gebruikersprojecten uit en bestuurt de apparaten die op de Brain zijn aangesloten.
De Motor zet energie om in beweging die gebruikt kan worden bij een bouwwerk. De Motor kan worden aangesloten op de Brain en worden aangestuurd door een VEXcode GO-project.