
Achtergrond
In deze eenheid onderzoeken studenten de evolutie van een robotarm van handmatig naar gemotoriseerd naar geautomatiseerd. Ook onderzoeken ze hoe de arm kan worden aangestuurd om een taak handmatig, met schakelaars en met behulp van code uit te voeren. Gedurende de module krijgen studenten de kans om na te denken over concepten die verband houden met mechanisatie, automatisering, projectstroom en voorwaardelijke uitspraken. Ook krijgen ze de kans om verbanden te leggen tussen menselijke en robotische processen.
Bouwt en beschikt over deze eenheid
Er zijn vier builds in deze eenheid:
- Een handmatige robotarm
- Een gemotoriseerde robotarm
- Een coderobotarm die op 1 as beweegt
- Een coderobotarm die op 2 assen beweegt
Deze builds kunnen individueel worden voltooid (voor elk Lab vanaf nul opgebouwd) of als een overgangsbuild (de eerste build wordt in daaropvolgende Labs aangepast). De belangrijkste kenmerken van elke build zijn:
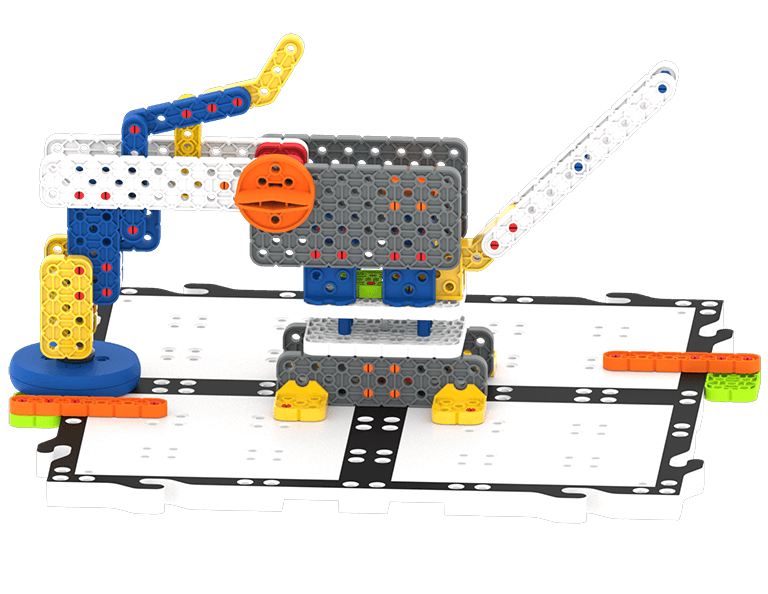
Robotarm: Een handmatig bediende robotarm die wordt bestuurd door de lange witte balk heen en weer te bewegen, of door de arm op en neer te bewegen met de oranje knoppen. Bij deze constructie wordt gebruikgemaakt van een Noord-Zuid-magneet om de schijven op te tillen.
Gemotoriseerde robotarm: Een robotarm die gebruikmaakt van motoren en schakelaars om te bewegen. De motoren en schakelaars zijn verbonden met een batterij. Bij deze constructie wordt ook gebruikgemaakt van een Noord-Zuid-magneet om de schijven op te tillen.
- Opmerking: Voor deze build zijn 2 GO-kits nodig om 1 robotarm te voltooien.
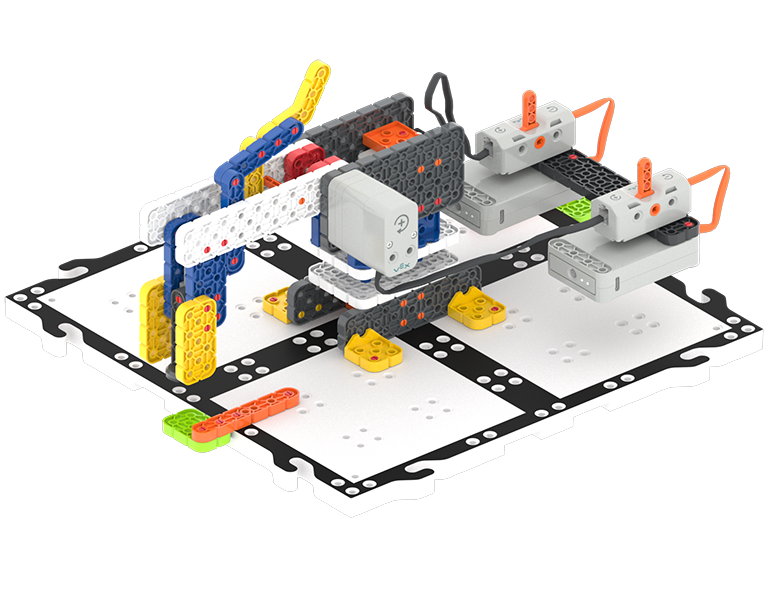
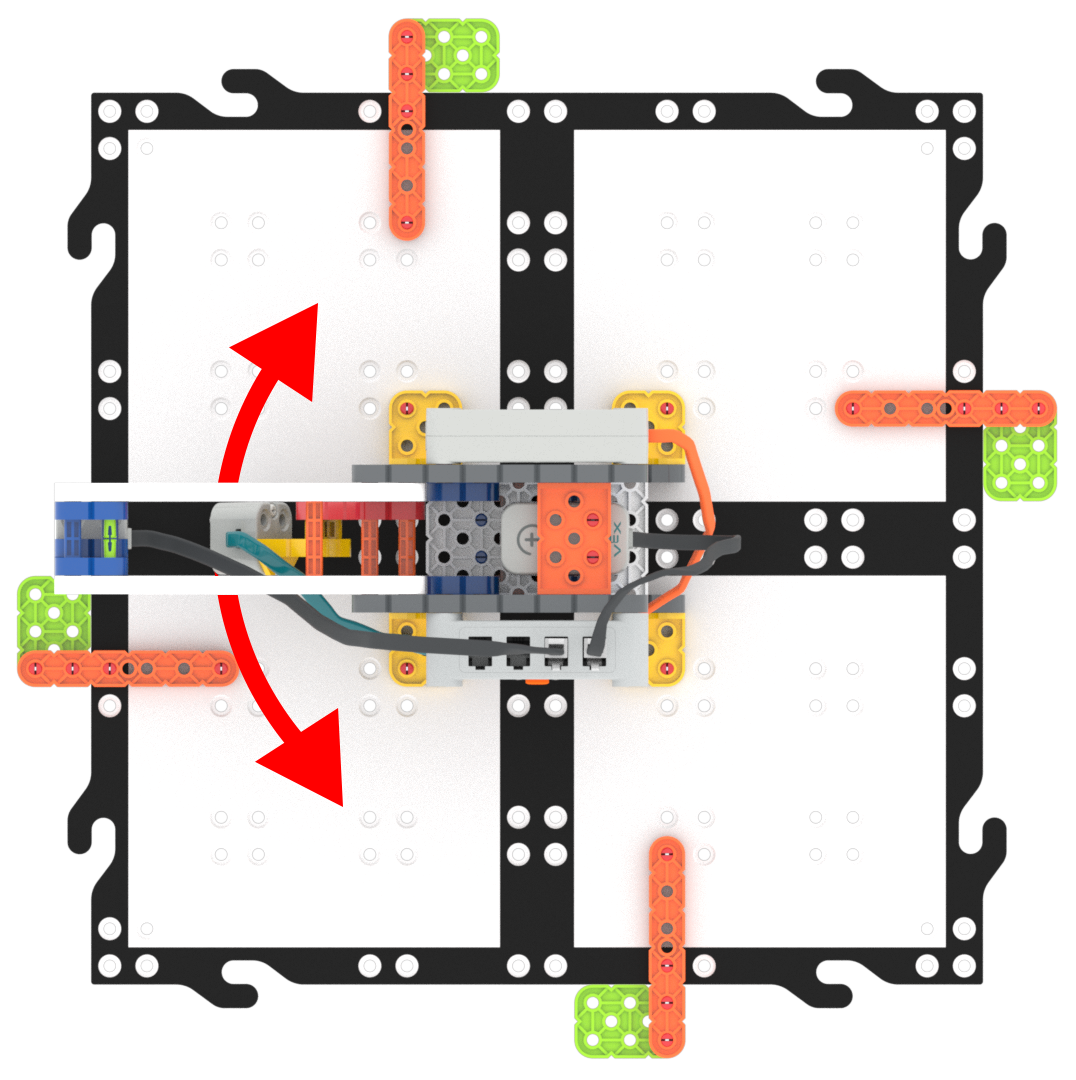
Code Robotarm (1-as): Een robotarm met motoren en een Brain die wordt bestuurd met VEXcode GO om op 1 as van links naar rechts te bewegen. Deze build voegt een Oogsensortoe en gebruikt een Elektromagneet om de schijven op te tillen.
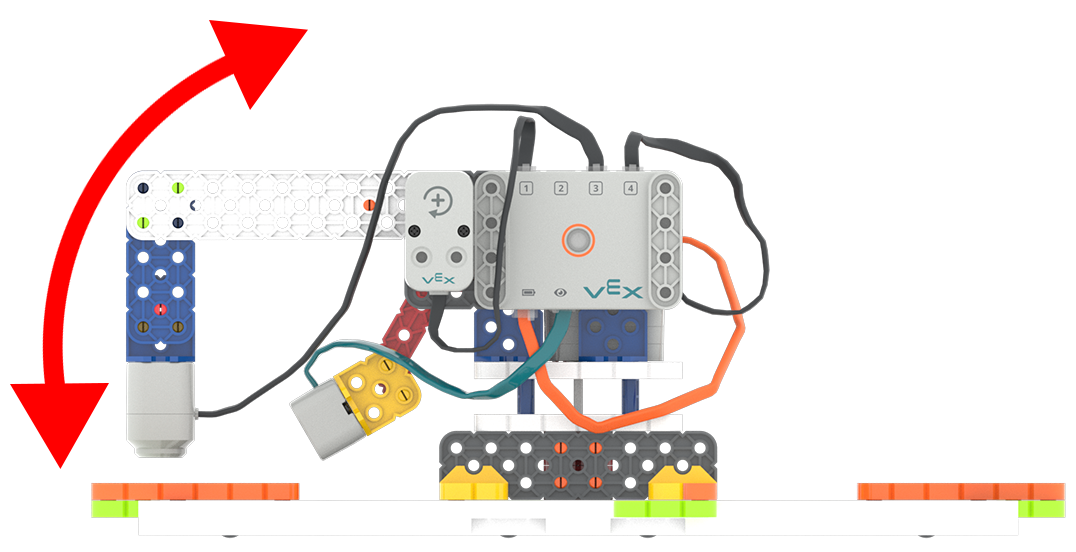
Code Robotarm (2-assig): De uiteindelijke robotarm die een motor toevoegt om de arm op een tweede as op te tillen - omhoog en omlaag. In deze build worden de oogsensor en de elektromagneet nog steeds gebruikt om de schijven op te tillen.
Robotarmen in het echte leven
Een robotarm is een type mechanische arm, meestal programmeerbaar, die op eenzelfde manier functioneert als een menselijke arm.

Robotarmen, die in verschillende richtingen kunnen bewegen, kunnen worden geprogrammeerd om veel verschillende taken uit te voeren. Tot deze taken behoren onder meer het lassen van metaal, machinaal bewerken, verven, monteren van onderdelen, plaatsen van onderdelen in andere machines en sorteren van objecten. Vaak voeren deze robots saaie, vieze en gevaarlijke taken uit, zodat mensen ze niet meer hoeven te doen.

Robotarmen kunnen worden uitgerust met elk type gereedschap. Deze gereedschappen worden gebruikt met een precisie, nauwkeurigheid, snelheid en herhaalbaarheid die mensen niet kunnen evenaren. In deze STEM-labeenheid gaan leerlingen hun robotarm uitrusten met een magneet en later met een elektromagneet.
Deze robotarmen kunnen sensoren en informatie van sensoren gebruiken om beslissingen te nemen over hun gedrag. In de latere labs van de unit onderzoeken studenten hoe de oogsensor werkt en hoe deze gebruikt kan worden om de bewegingen van de robotarm te besturen.
Industriële robots en automatisering spelen een belangrijke rol bij de productie van de meeste producten die tegenwoordig worden geproduceerd. Laat leerlingen als uitbreidingsactiviteit onderzoek doen naar industriële robots en een lijst maken van producten die ze gebruiken en die zijn gemaakt of gesorteerd door een robotarm.
Laboplossingen uitgelegd
In Labs 3-5 gaan leerlingen met VEXcode GO projecten maken waarmee ze de bewegingen van de robotarm kunnen aansturen met behulp van de elektromagneet, oogsensor, motoren en hersenen. In lab 3 leert u de basis van programmeren om de elektromagneet van stroom te voorzien en de robotarm te laten draaien. In lab 4 en 5 wordt onderzocht hoe de robotarm kan worden bestuurd door middel van besluitvorming in code. Ook wordt de projectstroom onderzocht met behulp van Booleaanse voorwaarden, voorwaardelijke statements en het [Forever]-blok om schijven te verplaatsen en beslissingen te nemen op basis van kleurdetectie.
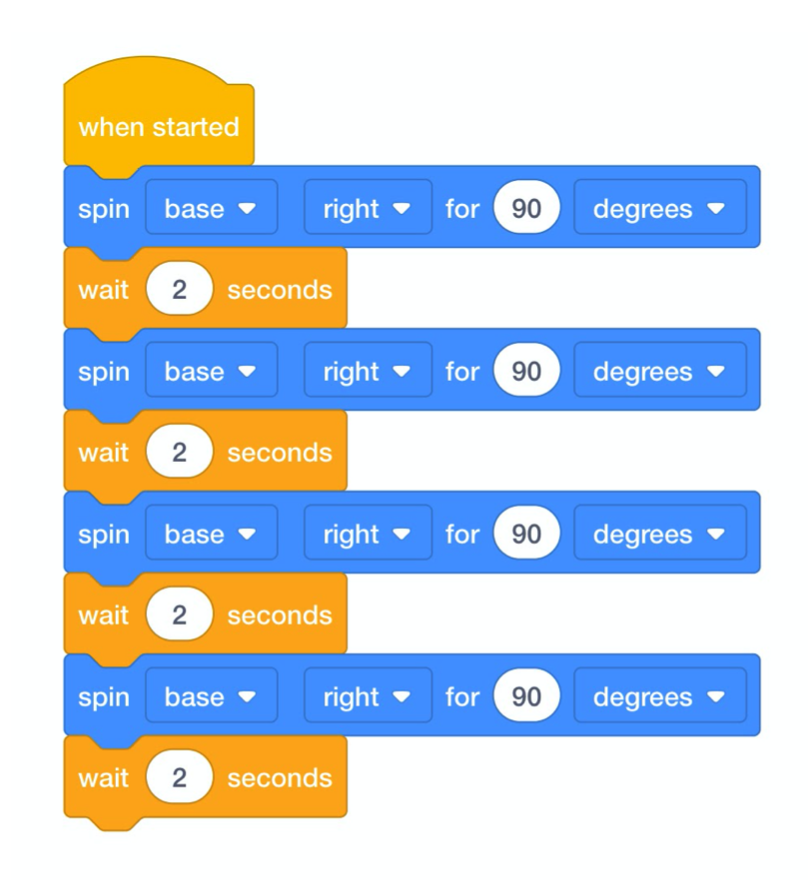
Lab 3 Play Deel 1 Oplossing
Met dit project wordt de robotarm gemaakt:
- Draai de robotarm naar rechts (90 graden).
- Wacht vervolgens 2 seconden.
- Herhaal dit proces vervolgens nog drie keer, zodat de robotarm helemaal ronddraait en terug in de beginpositie komt.
Lab 3 Play Deel 2 Oplossing
Met dit project wordt de robotarm gemaakt:
- Activeer de elektromagneet om de schijf op te pakken.
- Draai vervolgens de robotarm naar rechts om de schijf te verplaatsen.
- Plaats de schijf op een nieuwe locatie.
- Breng de robotarm terug naar de startpositie.
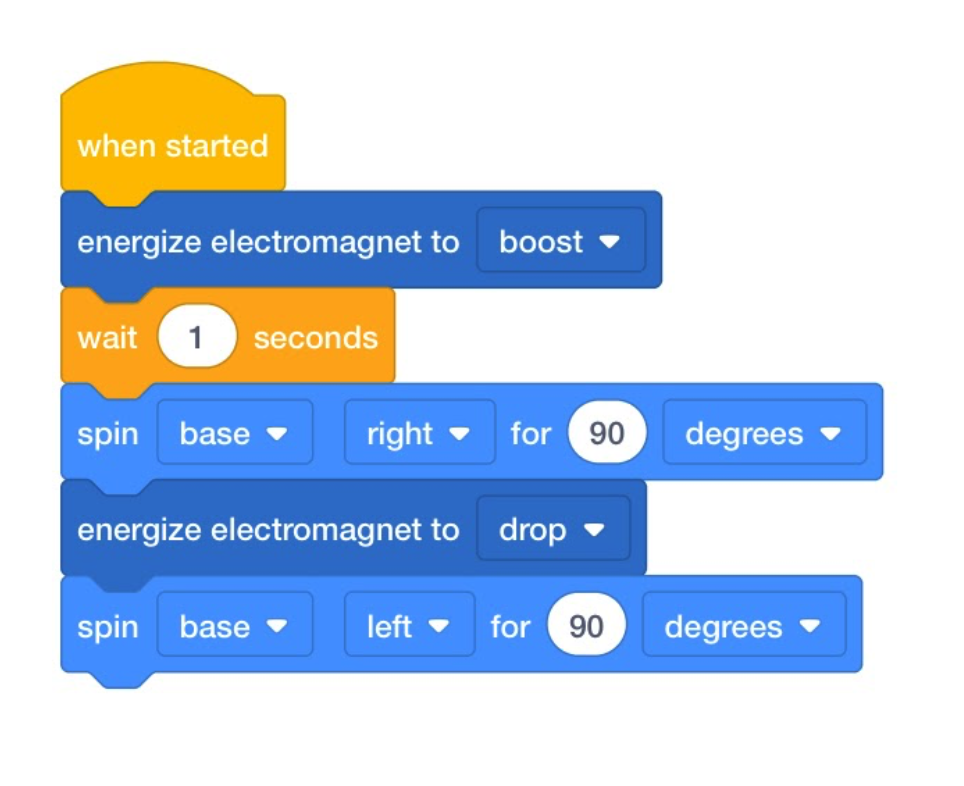
Opmerking: In dit scenario raakt de schijf de oranje straal op de tegel en raakt deze los van de magneet. Dit is het beoogde gedrag.
Lab 4 Play Deel 1 Oplossing
Met dit project wordt de robotarm gemaakt:
- Wacht tot de oogsensor een object vindt.
- Activeer vervolgens de elektromagneet om de schijf op te pakken.
- Draai vervolgens de robotarm naar rechts om de schijf te verplaatsen
- Plaats de schijf op een nieuwe locatie.
- Breng de robotarm terug naar de startpositie.
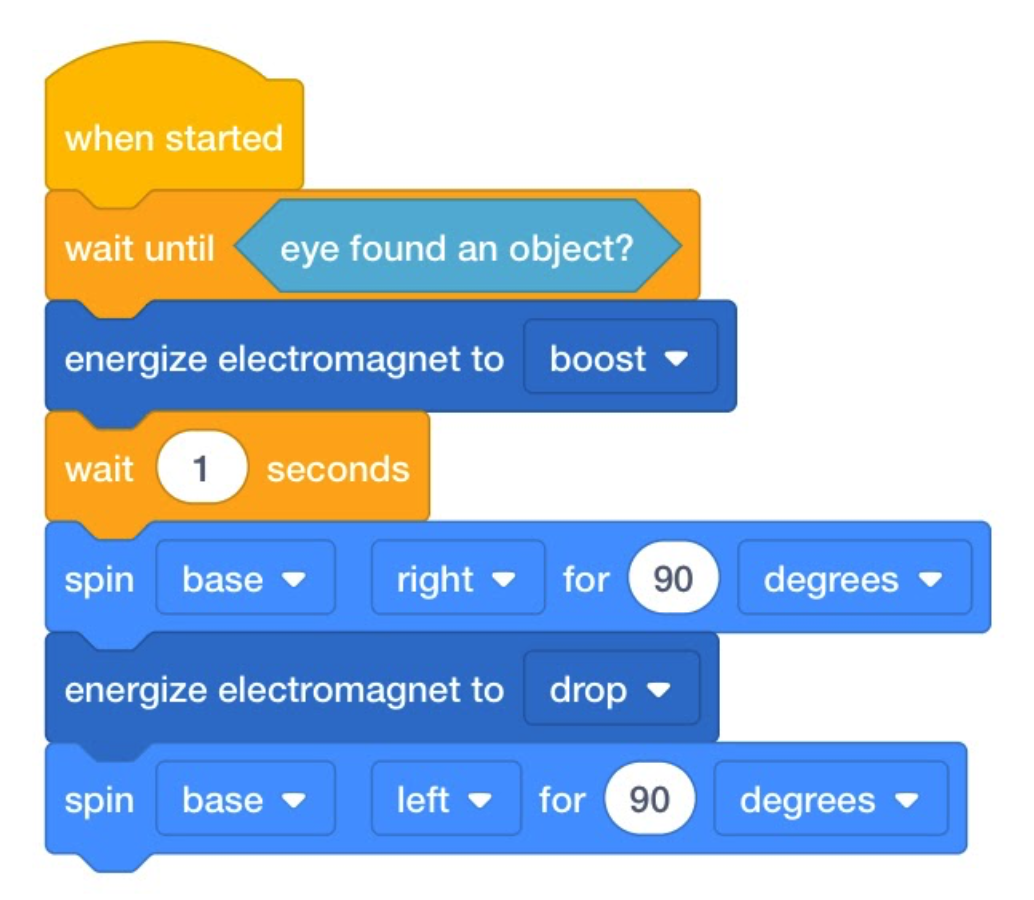
Opmerking: In dit scenario raakt de schijf de oranje straal op de tegel en raakt deze los van de magneet. Dit is het beoogde gedrag.
Lab 4 Play Deel 2 Oplossing
Met dit project wordt de robotarm gemaakt:
- Wacht tot de oogsensor een object heeft gevonden.
- Activeer vervolgens de elektromagneet om de schijf op te pakken.
- Beweeg vervolgens de robotarm OMHOOG om de schijf op te tillen.
- Draai vervolgens de robotarm naar rechts om de schijf te verplaatsen.
- Beweeg vervolgens de robotarm NAAR BENEDEN zodat hij de schijf kan laten vallen.
- Breng de robotarm terug naar de startpositie.
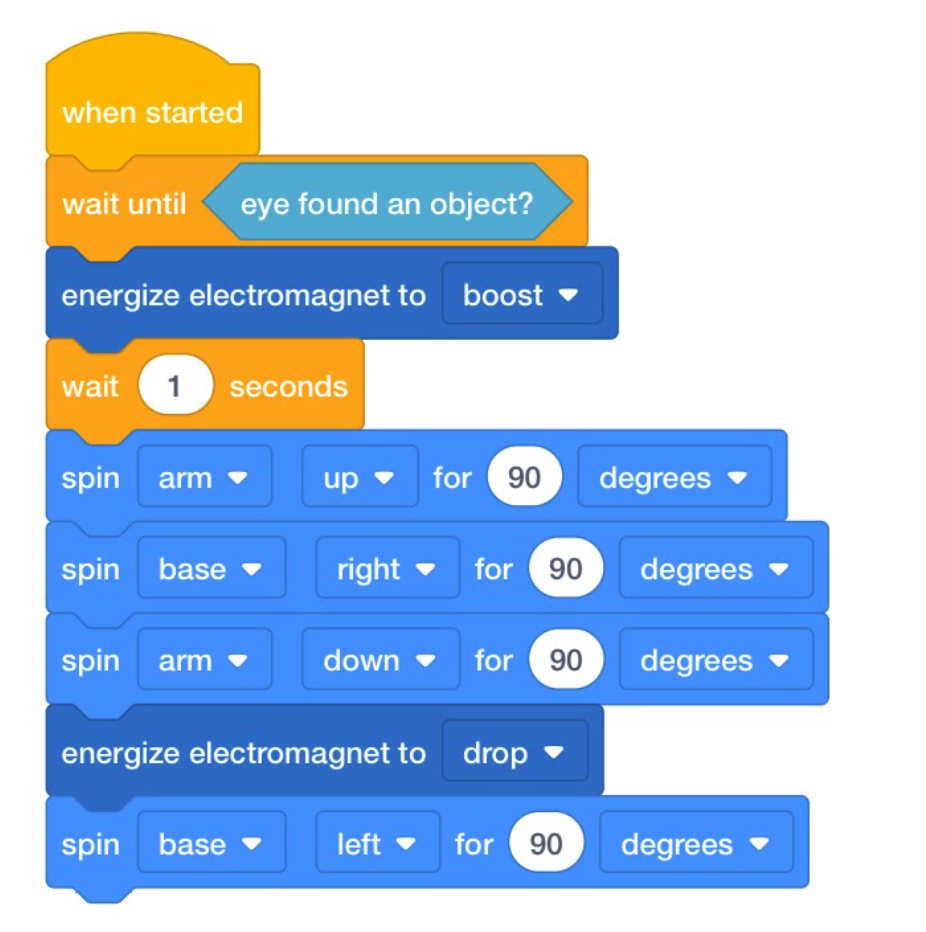
Deze projecten gebruiken het blok [Wachten tot] om de stroom van het project te regelen, zodat er wordt gewacht tot de oogsensor een object detecteert voordat de elektromagneet wordt geactiveerd. Als er niet op de oogsensor wordt gewacht, beweegt de elektromagneet zonder de schijf op te pakken. Hierdoor kan de robot een beslissing nemen op basis van de gegevens die hij via zijn oogsensor ontvangt.
Lab 5 Play Deel 1 Oplossing
Met dit project wordt de robotarm gemaakt:
- Wacht tot de oogsensor een object vindt.
- Als het object groen is, zal het de schijf verplaatsen zoals in Lab 4.
- De robotarm controleert voortdurend op groene objecten vanwege het [Forever]-blok rond de stapel.
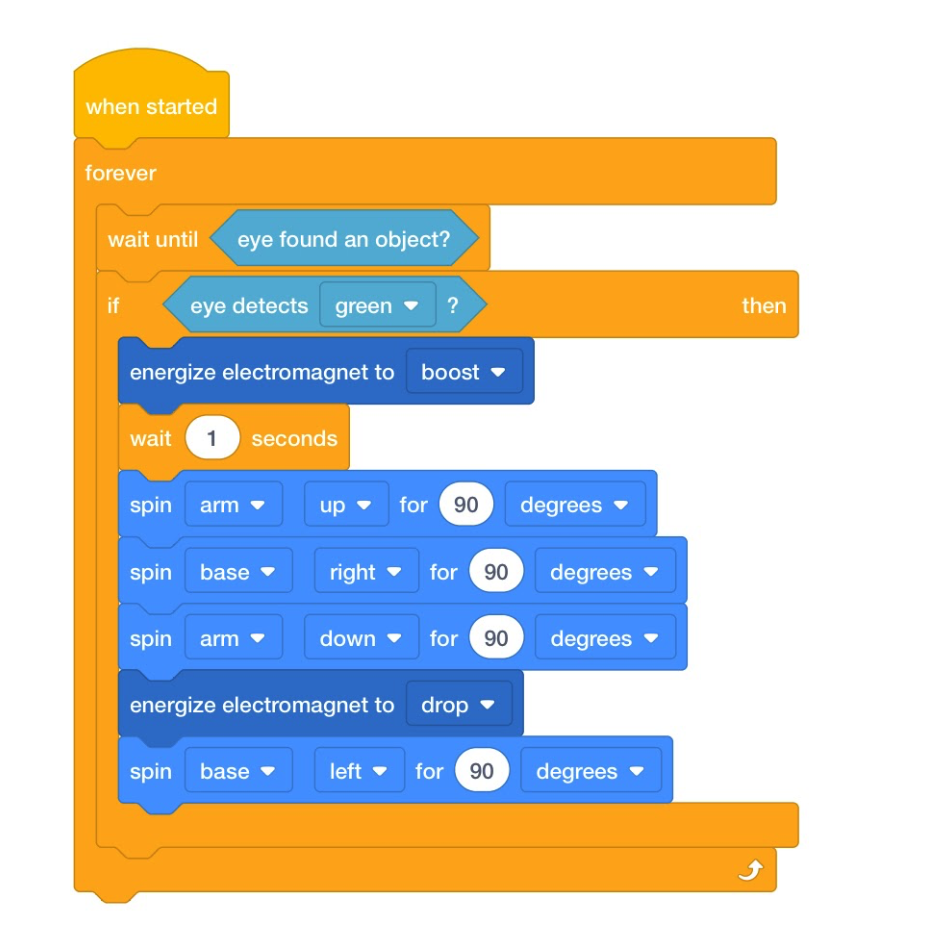
Lab 5 Play Deel 2 Oplossing
Met dit project wordt de robotarm gemaakt:
- Wacht tot de oogsensor een object vindt.
- Als het object groen is, tilt de robotarm de schijf op en beweegt deze 90 graden naar rechts. Vervolgens laat hij de schijf vallen en keert hij terug naar de beginpositie.
- Als het object rood is, tilt de robotarm de schijf op en beweegt deze 180 graden naar rechts. Vervolgens laat hij de schijf vallen en keert hij terug naar de beginpositie.
- Als het object blauw is, tilt de robotarm de schijf op en beweegt deze 90 graden naar links. Vervolgens laat hij de schijf vallen en keert hij terug naar de beginpositie.
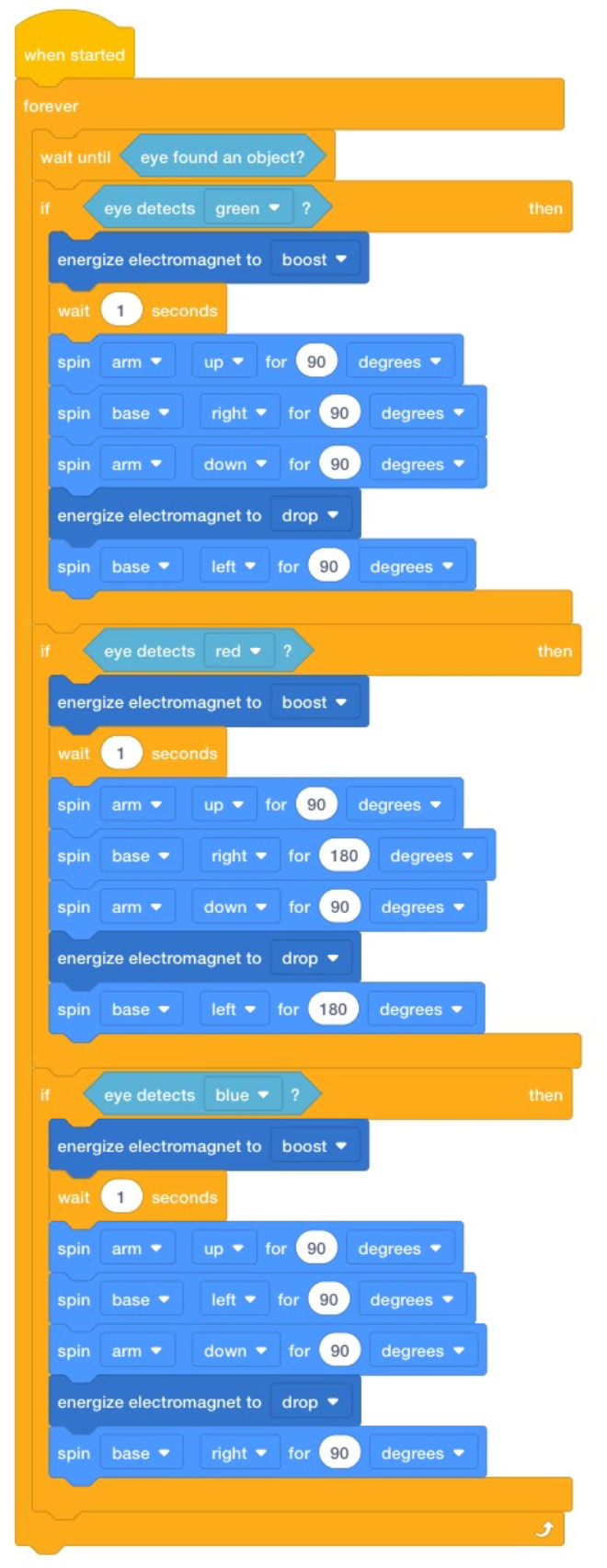
Deze projecten voegen voorwaardelijke uitspraken toe, zodat de robot herhaaldelijk beslissingen kan nemen op basis van de gegevens van de oogsensor. Ze worden herhaald omdat het [Forever]-blok wordt gebruikt om de robot te vertellen voortdurend op objecten te controleren.
Voor meer informatie over de afzonderlijke blokken die in deze projecten worden gebruikt, kunt u de Help-functie in VEXcode GO gebruiken. Voor meer informatie over blokvormen en hun betekenissen, zie het artikel Blokvormen en Betekenissen in de VEX-bibliotheek. Als u meer wilt weten over de computerwetenschappelijke concepten achter deze codeoplossingen, is de Science Fundamentals Educator Certification Course wellicht iets voor u.
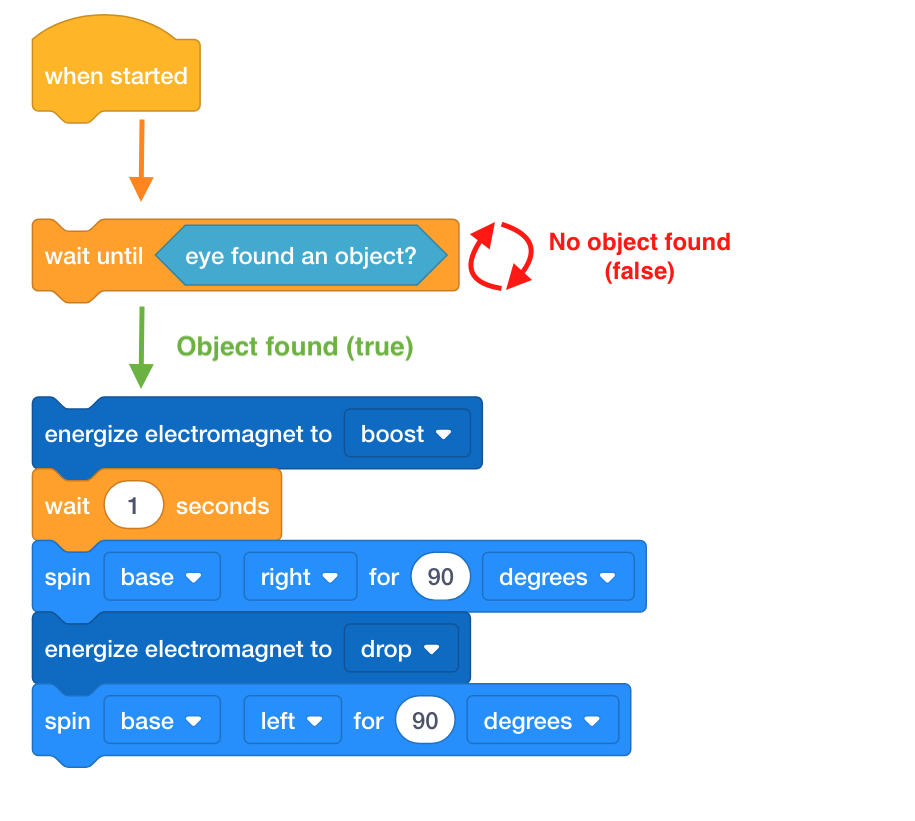
Wat is Project Flow?
Project Flow beschrijft de volgorde waarin blokken in een project worden uitgevoerd. Alle projecten lopen van boven naar beneden, uitgaande van het [When started] hoedenblok. Er wordt slechts één blok tegelijk uitgevoerd en zodra een blok zijn acties of gedragingen heeft voltooid, gaat het project automatisch door naar het volgende blok. Bepaalde regelblokken (oranje van kleur) kunnen de projectstroom wijzigen, op basis van een voorwaarde of parameterwaarde. In dit project zal het blok [Wait until] bijvoorbeeld de stroom van het project stoppen en "wachten tot" aan de voorwaarde is voldaan (in dit geval heeft de oogsensor een object gevonden). Zodra aan die voorwaarde is voldaan (de oogsensor heeft een object gevonden, dus het blok rapporteert een waarde van WAAR), zal het blok [Wacht tot] eindigen en doorgaan naar het volgende blok in het project.
VEX GO Pieces
Voor meer gedetailleerde informatie over de VEX GO Kit-onderdelen en elektronica die in de Robot Arm Unit worden gebruikt, zie het artikel stuks in de VEX GO Kit VEX-bibliotheek.