
ภูมิหลัง
Mars Rover: Surface Operations Unit จะทำให้คุณและนักเรียนของคุณคุ้นเคยกับการสร้างโครงการ VEXcode 123 เพื่อแก้ปัญหา การกระทำของ Perseverance rover และ Mars 2020 Mission ถูกใช้เป็นแรงบันดาลใจสำหรับความท้าทายที่นักเรียนจะได้รับจากการใช้ VEXcode 123 และหุ่นยนต์ 123 โปรเจกต์ที่พวกเขาสร้างจะต้องเรียงลำดับอย่างถูกต้องเพื่อเก็บตัวอย่างและ 'ฝัง'
ภารกิจ Mars 2020 ของนาซา
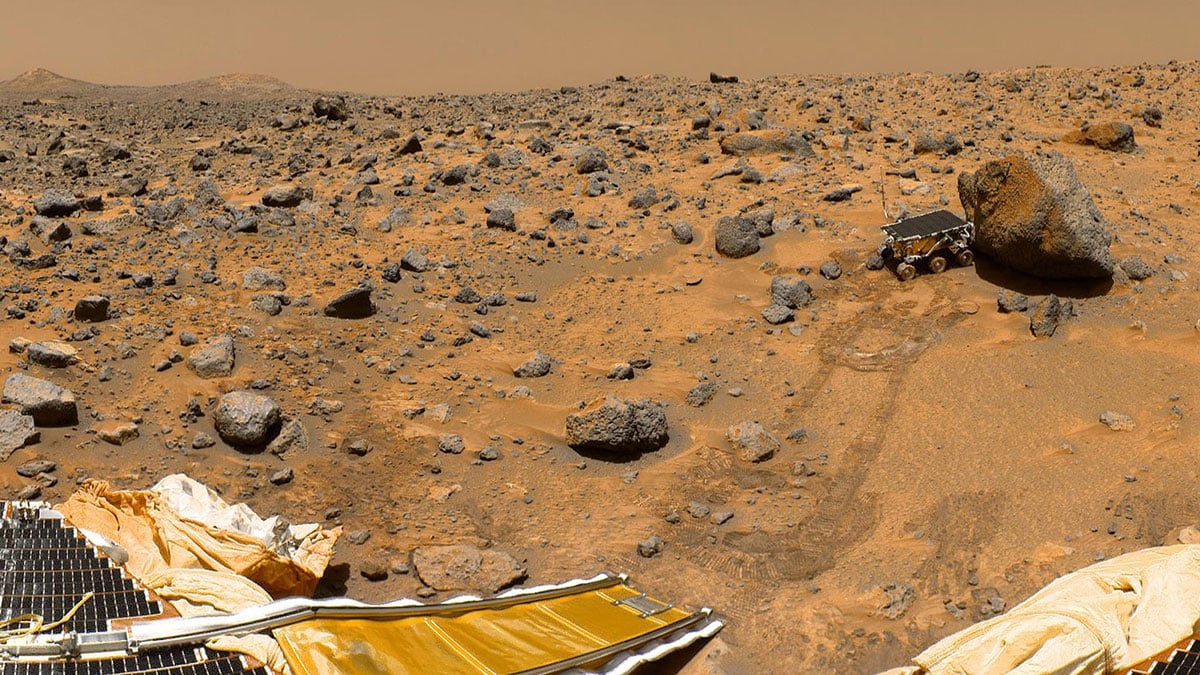
ภารกิจ Mars 2020 ของนาซากล่าวถึงเป้าหมายทางวิทยาศาสตร์ที่มีความสำคัญสูงสำหรับการสำรวจดาวอังคารได้แก่สิ่งมีชีวิตสภาพภูมิอากาศธรณีวิทยาและมนุษย์ Perseverance rover จะเสร็จสิ้นการดำเนินการพื้นผิวเพื่อรวบรวมข้อมูลเพื่อช่วยในการแจ้งการวิจัยเกี่ยวกับ Red Planet
รถแลนด์โรเวอร์คืออะไร?
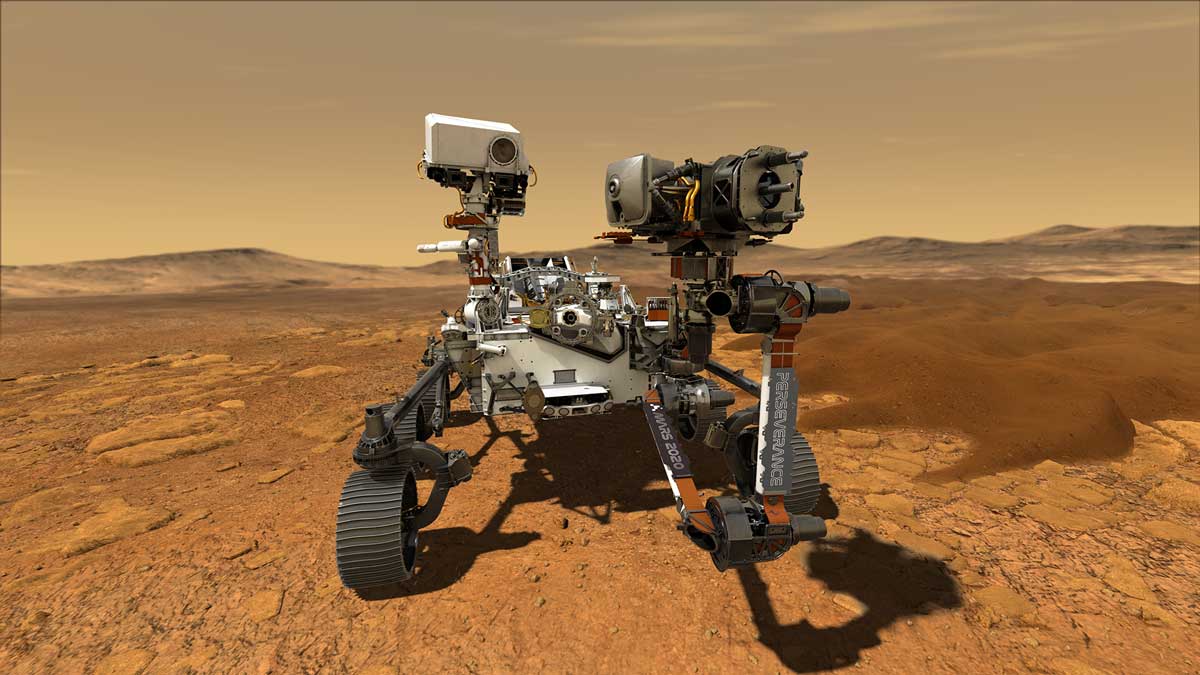
ยานสำรวจเป็นอุปกรณ์ที่ออกแบบมาเพื่อเคลื่อนที่ข้ามพื้นผิวของแข็งของดาวเคราะห์หรือท้องฟ้าอื่นๆ (เช่นดวงจันทร์) ยานสำรวจบางคันได้รับการออกแบบมาเพื่อขนส่งสมาชิกของลูกเรืออวกาศในขณะที่บางคันเป็นหุ่นยนต์อัตโนมัติบางส่วนหรือทั้งหมด หุ่นยนต์เหล่านี้มักได้รับมอบหมายให้รวบรวมข้อมูลเกี่ยวกับภูมิประเทศและเก็บตัวอย่างหินดินหรือแม้แต่ของเหลว
การทำงานบนพื้นผิวคืออะไร?
การดำเนินงานบนพื้นผิวเป็นการศึกษาทางวิทยาศาสตร์ที่ยานสำรวจจะเสร็จสมบูรณ์บนดาวอังคาร ทั้งหมดนี้มุ่งเน้นไปที่การค้นหารวบรวมและเก็บตัวอย่างทางธรณีวิทยา ในการเริ่มต้นความเพียรจะมองหาหินที่น่าสนใจ หินอาจถือได้ว่าน่าสนใจหากมีความเป็นไปได้ที่จะรักษาร่องรอยทางเคมีของสิ่งมีชีวิตโบราณหรือถูกเปลี่ยนแปลงโดยสภาพแวดล้อมที่สนับสนุนสิ่งมีชีวิตของจุลินทรีย์
หลังจากระบุหินที่น่าสนใจแล้วความเพียรจะเจาะตัวอย่างออกมาวางไว้ในท่อที่ปิดสนิทและแคชไว้บนพื้นผิว การแคชคลังที่ใช้ในระหว่างภารกิจนี้คือที่ที่เหลือหรือฝังตัวอย่างจำนวนมากในสถานที่เดียวกัน ภารกิจในอนาคตจะสามารถรวบรวมตัวอย่างเหล่านี้และส่งคืนทั้งหมดให้กับนักวิทยาศาสตร์บนโลกได้
การหาลำดับถูกนำมาใช้ในหน่วยนี้อย่างไร?
ลำดับคือลำดับเฉพาะที่พฤติกรรมถูกกระทำ การกระทำหรือเหตุการณ์จะนำไปสู่การกระทำตามลำดับถัดไปตามลำดับ การเรียงลำดับเป็นสิ่งสำคัญสำหรับหุ่นยนต์ 123 ตัวเพราะหุ่นยนต์จะเคลื่อนที่ตามคำสั่งที่สั่งเท่านั้น
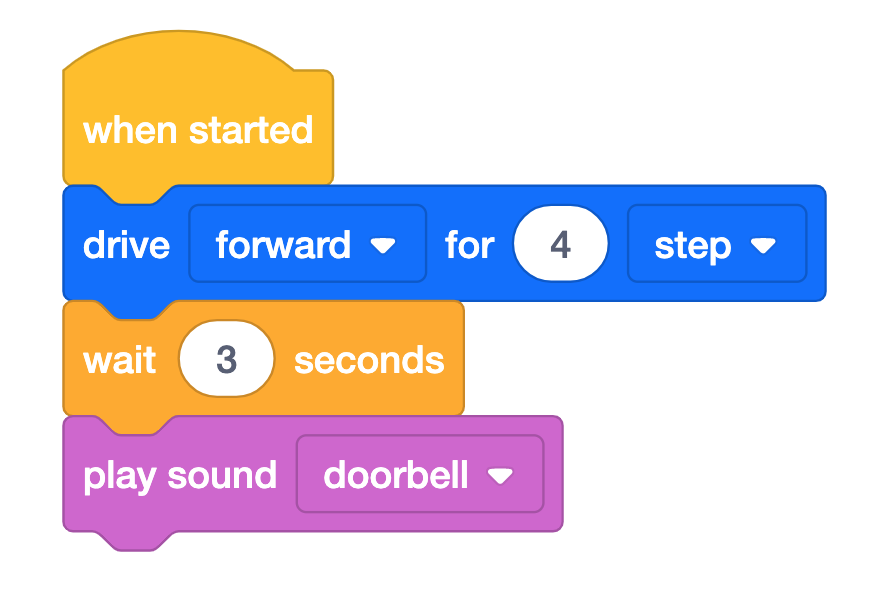
ในภาพเคลื่อนไหวด้านล่างคุณจะเห็นว่าโปรเจกต์เริ่มต้นด้วย {When started} บล็อกที่ด้านบนของโปรเจกต์อย่างไรจากนั้นแต่ละบล็อกจะดำเนินการตามลำดับจากบนลงล่าง หุ่นยนต์ 123 ขับไปข้างหน้าสี่ช่องบนสนาม 123 รอ 2 วินาทีจากนั้นเปิดเสียง คุณสมบัติไฮไลต์สีเขียวรอบๆบล็อกจะระบุว่าบล็อกใดกำลังทำงานอยู่ในขณะนั้น สิ่งนี้สามารถให้ข้อเสนอแนะแก่นักเรียนได้ทันทีเพื่อเชื่อมต่อพฤติกรรมของหุ่นยนต์ 123 ด้วยบล็อก VEXcode 123 เฉพาะ
ขั้นตอนในการลำดับโครงการ
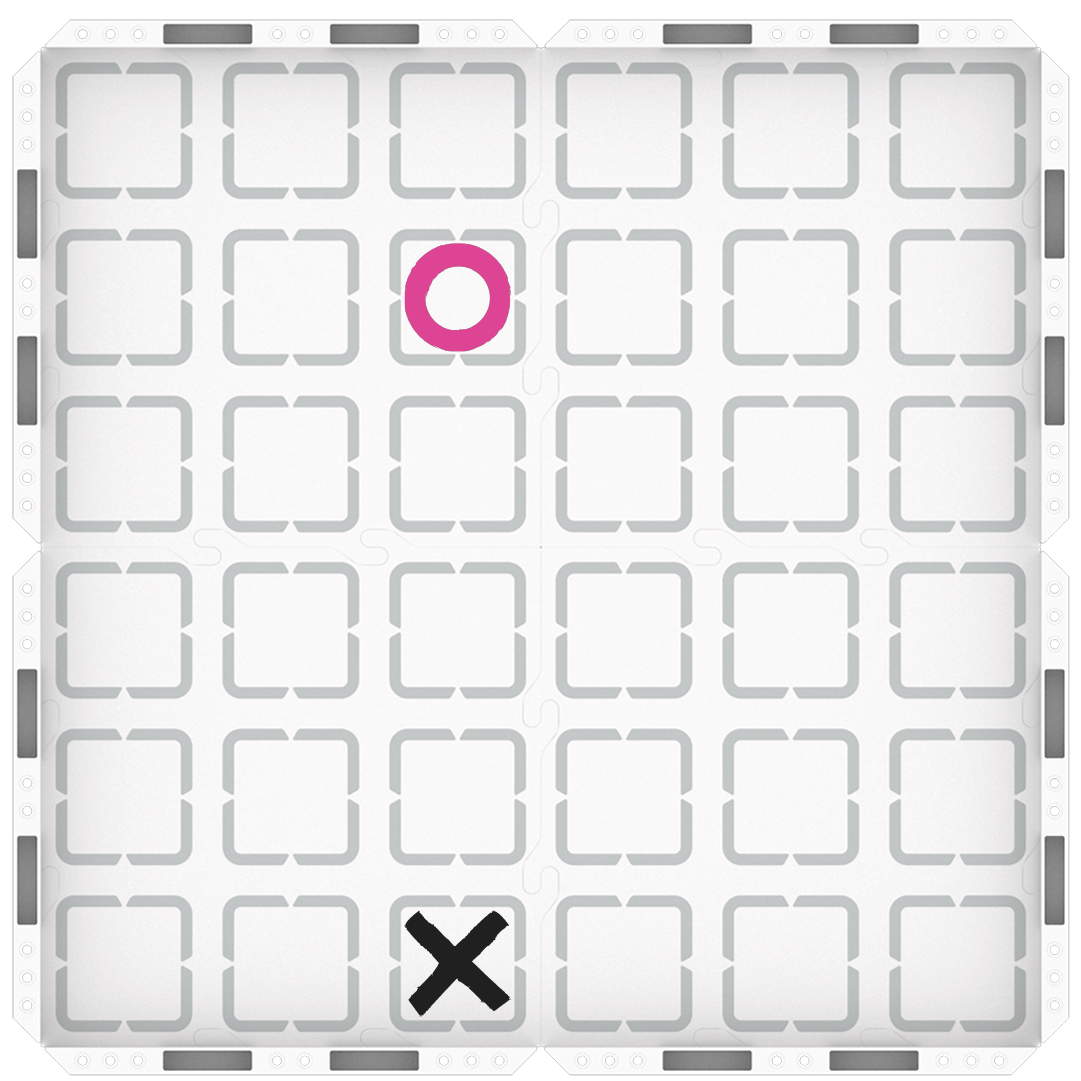
- ขั้นแรกระบุเป้าหมาย - ต้องทำอะไรบ้าง? ตัวอย่างเช่นขับรถจากจุดเริ่มต้นไปยังตัวอย่างแรก
-
จากนั้นแบ่งขั้นตอนที่จำเป็นในการบรรลุเป้าหมายและระบุบล็อกที่จำเป็นในการบรรลุขั้นตอนเหล่านี้ ที่นี่คุณจะต้องก้าวไปข้างหน้า 4 ขั้นตอนเพื่อไปถึงตัวอย่างรอ 3 วินาทีจากนั้นเล่นเสียงเพื่อระบุตัวอย่างที่ถูกรวบรวม สิ่งนี้สามารถทำได้ด้วยบล็อก [Drive for], [Wait] และ [Play sound]

[Drive for], [Wait] และ [Play sound] บล็อค
-
จากนั้นวางแผนลำดับของโครงการโดยลากบล็อกที่ตรงกันลงในพื้นที่ทำงานและแนบไปกับ {When started} บล็อกจากบนลงล่าง เมื่อเพิ่มแต่ละบล็อกแล้วให้เปลี่ยนพารามิเตอร์เพื่อให้ตรงกับขั้นตอนที่แบ่งออกก่อนหน้านี้
ลำดับตัวอย่าง
-
เลือก "เริ่ม" เพื่อทดสอบโครงการและดูว่าหุ่นยนต์ 123 ตัวบรรลุเป้าหมายที่ระบุไว้ในขั้นตอนแรกหรือไม่

เลือก 'เริ่ม'
หากคุณต้องการเปลี่ยนโปรเจกต์ของคุณเพียงแค่เปลี่ยนพารามิเตอร์หรือเพิ่มและลบบล็อกออกจากโปรเจกต์ก่อนที่จะทดสอบอีกครั้ง
VEXcode 123 คืออะไร?
VEXcode 123 เป็นภาษาโปรแกรมแบบบล็อกที่ใช้กับหุ่นยนต์ 123 ภาษาโปรแกรมคือชุดของกฎที่มีสัญลักษณ์แสดงถึงการกระทำ ภาษาการเขียนโปรแกรมทำตามคำแนะนำทีละขั้นตอนที่คอมพิวเตอร์ดำเนินการเพื่อให้โปรเจกต์ทำงาน สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ VEXcode 123 โปรดดูที่ส่วน VEXcode 123 ของไลบรารีVEX
คุณต้องการบล็อก VEXcode 123 อะไร?
บล็อกใน VEXcode 123 แทน 123 คำสั่งหุ่นยนต์ที่ใช้ในการสร้างโครงการใน VEXcode 123 ด้านล่างนี้เป็นรายการบล็อกหลักที่ใช้ในระหว่างหน่วยนี้
| VEXcode 123 บล็อก | พฤติกรรม |
|---|---|
 |
{When start} บล็อกจะเริ่มเรียกใช้กองบล็อกที่แนบมาเมื่อเริ่มโครงการ |
 |
บล็อก [Drive for] เคลื่อนหุ่นยนต์ 123 ตัวไปข้างหน้าหรือย้อนกลับตามระยะทางที่กำหนด กำหนดระยะทางที่หุ่นยนต์ 123 จะเคลื่อนที่โดยการป้อนค่าลงในวงรี |
|
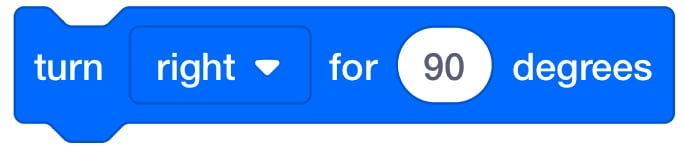
บล็อก [Turn for] จะหมุนหุ่นยนต์ 123 ตัวไปทางซ้ายหรือขวาตามจำนวนองศาที่กำหนด |
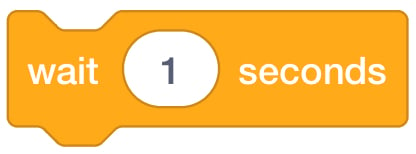 |
บล็อก [รอ] รอระยะเวลาที่กำหนดก่อนที่จะย้ายไปยังบล็อกถัดไปในโปรเจกต์ |
|
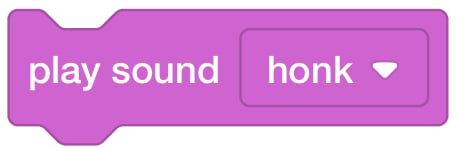
บล็อก [เล่นเสียง] ทำให้หุ่นยนต์ 123 เล่นเสียงที่ระบุ |