
ภารกิจน้ำสะอาด
5 บทเรียน
ในหน่วยนี้คุณจะร่วมมือกับทีมของคุณเพื่อใช้ AI Vision Sensor และรหัสหุ่นยนต์ EXP ของคุณเพื่อปกป้องสุขภาพของชุมชนของคุณในขณะที่คุณประมวลผลน้ำที่สะอาดและปนเปื้อนด้วยความแม่นยำ!
ต้องใช้ VEX AI Vision Sensor
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Clean Water Mission Lessons.
ภาพรวมยูนิต
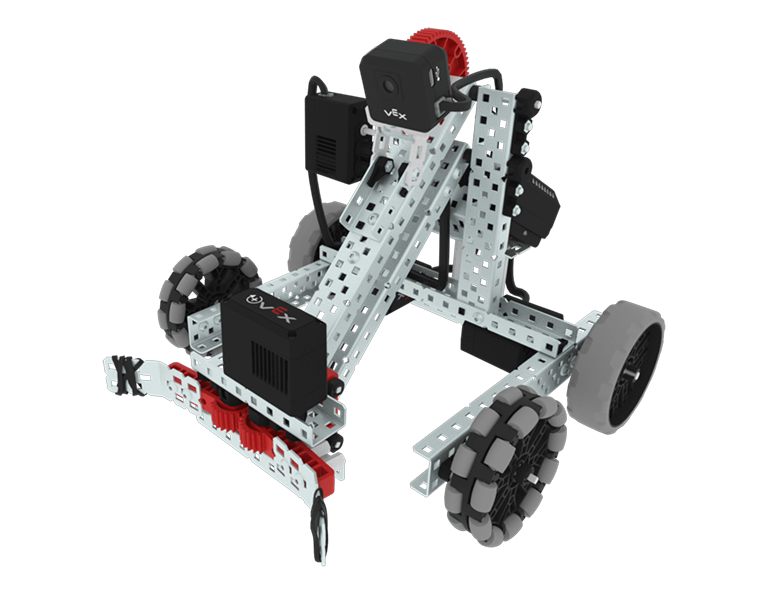
ได้รับการแนะนำให้รู้จักกับภารกิจน้ำสะอาดและสร้างหุ่นยนต์ที่คุณจะใช้ในการแก้ปัญหาความท้าทาย เรียนรู้เกี่ยวกับ AI Vision Sensor กระบวนการสามขั้นตอนที่คุณจะใช้ในการทำภารกิจแต่ละขั้นตอนให้เสร็จสมบูรณ์และวิธีที่คุณจะได้รับการประเมิน
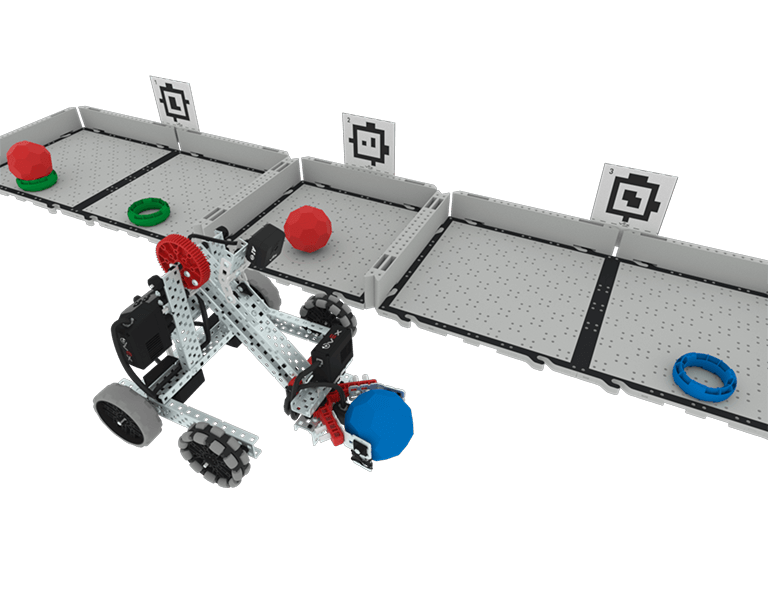
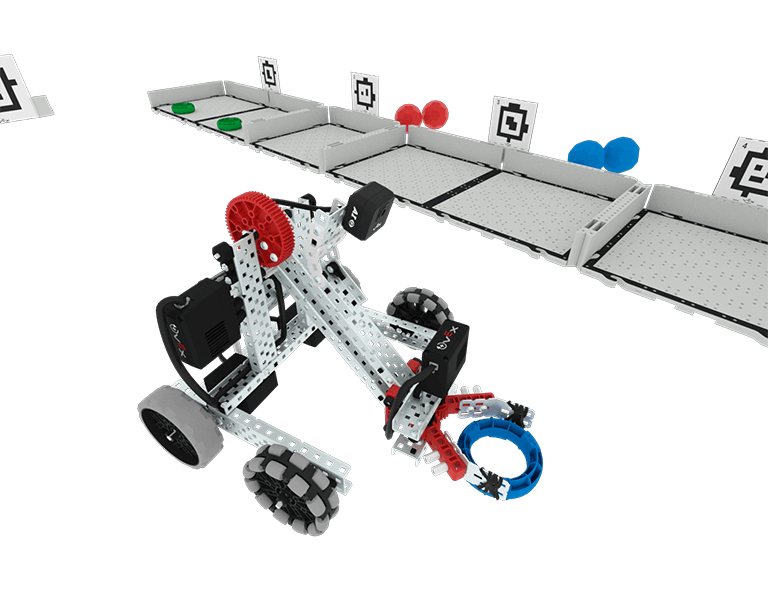
ขั้นตอนที่ 1: การทดสอบการปนเปื้อนของน้ำ
ความท้าทายแบบเปิดนี้จะแนะนำให้คุณรู้จักกับภารกิจน้ำสะอาด ใช้ข้อมูลจาก AI Vision Sensor เพื่อเข้ารหัสหุ่นยนต์ของคุณเพื่อระบุและส่งน้ำที่ปนเปื้อนไปยังพื้นที่บำบัดน้ำ
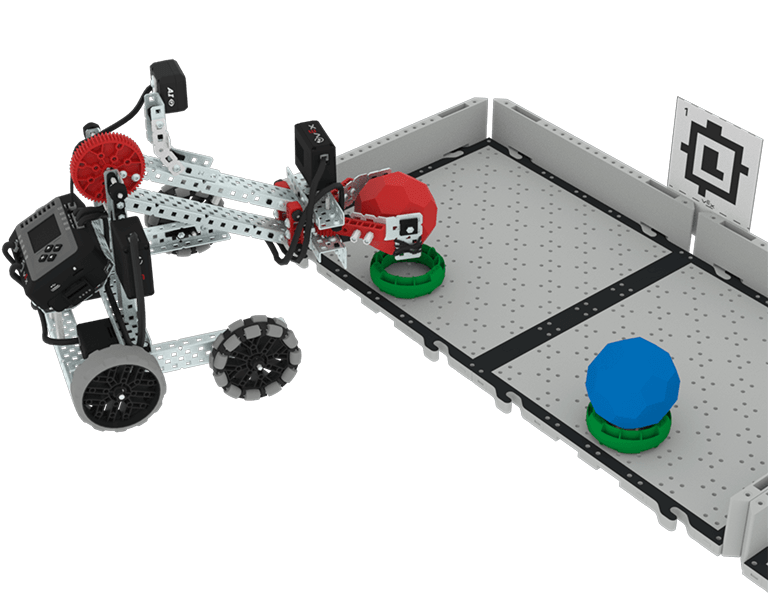
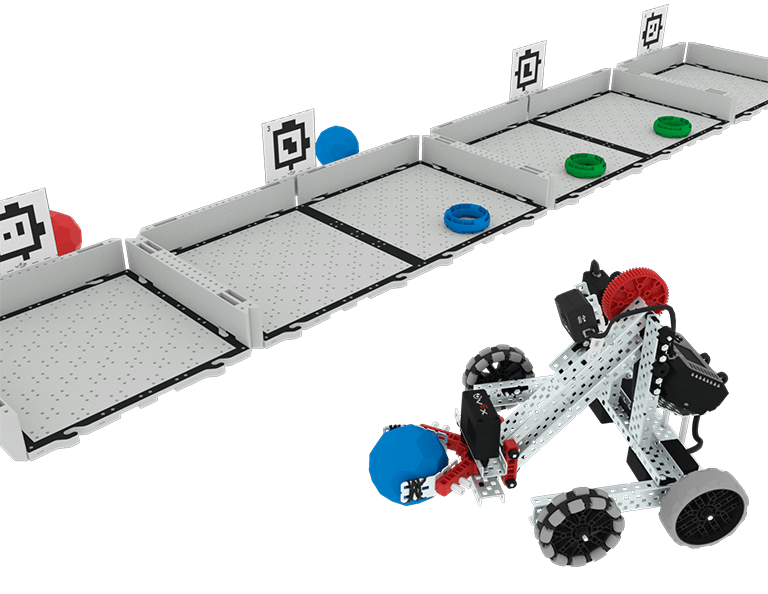
Stage 2: Sort and Sanitize Challenge
Build on your experience in the previous challenge as you code your robot to identify, sort, and distribute clean and contaminated water to their designated areas.
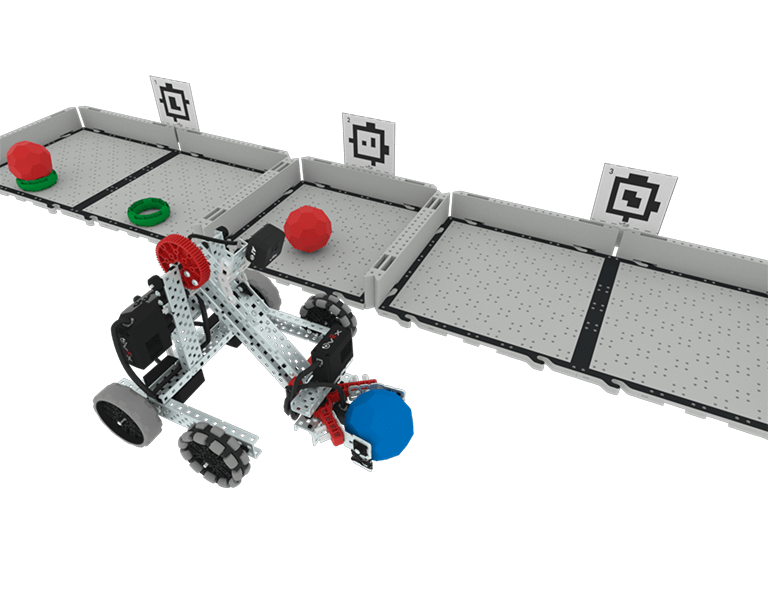
ขั้นตอนที่ 3: ความท้าทายในการกระจายน้ำ
เดินทางต่อไปยังสถานที่บำบัดน้ำตามที่คุณกำหนดรหัสหุ่นยนต์ของคุณเพื่อระบุและส่งน้ำบริสุทธิ์ไปยังพื้นที่แจกจ่าย สร้างโปรเจกต์ของคุณเพื่อระบุคัดแยกและเคลื่อนย้ายน้ำบริสุทธิ์น้ำสะอาดและน้ำปนเปื้อนไปยังจุดหมายปลายทาง
ขั้นตอนที่ 4: การท้าทายน้ำสะอาดระดับโลก
ตอนนี้คุณได้พิสูจน์แล้วว่าทีมของคุณสามารถสร้างระบบบำบัดน้ำแบบพกพาได้ตรวจสอบให้แน่ใจว่าสามารถใช้งานได้ทุกที่ในโลกโดยการเข้ารหัสหุ่นยนต์ของคุณเพื่อขนส่งน้ำไปยังตำแหน่งที่ถูกต้องโดยไม่คำนึงถึงรูปแบบของพื้นที่