
Arka plan
Mars Rover: İniş Mücadelesi Ünitesi, öğrencilerinize bir problemi çözmek için VEXcode GO projeleri oluşturmaları konusunda meydan okuyacaktır. Bu Ünite, öğrencilere, bilim insanlarının Mars 2020 Perseverance gezgini gibi uzay araçlarını indirmeye çalışırken kullandıkları süreçten esinlenerek, Kod Tabanının ön tarafındaki Göz Sensörünü bir meydan okumada kullanmayı öğretiyor. Öğrenciler, bir engeli tespit etmek için Kod Tabanını kodlayacak, ardından iniş sahasında bir engel bulunduğunu belirtmek için sürüşü durduracaklar.
NASA'nın Mars 2020 Görevi
NASA'nın Mars 2020 Görevi, Mars keşfi için yüksek öncelikli bilimsel hedeflere odaklanıyor: yaşam, iklim, jeoloji ve insanlar. Ancak Perseverance keşif aracının yüzeyden kaya ve toprak örnekleri toplama görevine başlamadan önce, Kızıl Gezegen'e güvenli bir şekilde inmesi gerekiyor.
NASA'ya göre, herhangi bir uzay ajansı tarafından Mars'a gönderilen görevlerin yalnızca yaklaşık %40'ı başarılı oldu. Giriş, iniş ve inişin tamamı sadece birkaç dakika sürecek, ancak Perseverance gezginini taşıyan uzay aracının saatte yaklaşık 20.000 km (~12.500 mil) olan hızını sıfıra düşürmesi ve iniş için açık, düz bir alan bulması gerekiyor. Mars'ın yüzeyi engellerle doludur; devasa çarpma kraterleri, uçurumlar, çatlaklar ve engebeli kayalar. Öngörülemeyen rüzgarlar da daha fazla karışıklığa yol açabilir.

Güvenli bir iniş sağlamak için Perseverance keşif aracı iniş sırasında görüntüler alacak ve bu görüntüleri haritalarla karşılaştıracak. Bilim insanları tarafından tehlikeli olarak belirlenen alanın olup olmadığına hızla karar verip, açık alana iniş yapmak için gerekli ayarlamaları yapabiliyor. İniş fotoğraflarını kullanarak keşif aracının karar verme sürecini daha iyi anlamak için aşağıdaki animasyonu izleyin.
Bu Ünitede, öğrenciler, gezicinin güvenli bir iniş yapmasını sağlamak için Fields'larındaki iniş noktalarındaki engelleri tespit etmek üzere Kod Tabanını kodlayacaklar.
Sensör nedir?
Sensör, özünde bir robotun etrafındaki dünyayı anlamasına yardımcı olan bir cihazdır. Bunu, çevresi hakkında veri toplayıp raporlayarak yapar; bu veriler daha sonra bir projede robotun karar almasını veya belirli davranışları gerçekleştirmesini sağlamak için kullanılabilir. Bu dizi, Hisset → Düşün → Harekete Geç karar döngüsü olarak düşünülebilir.
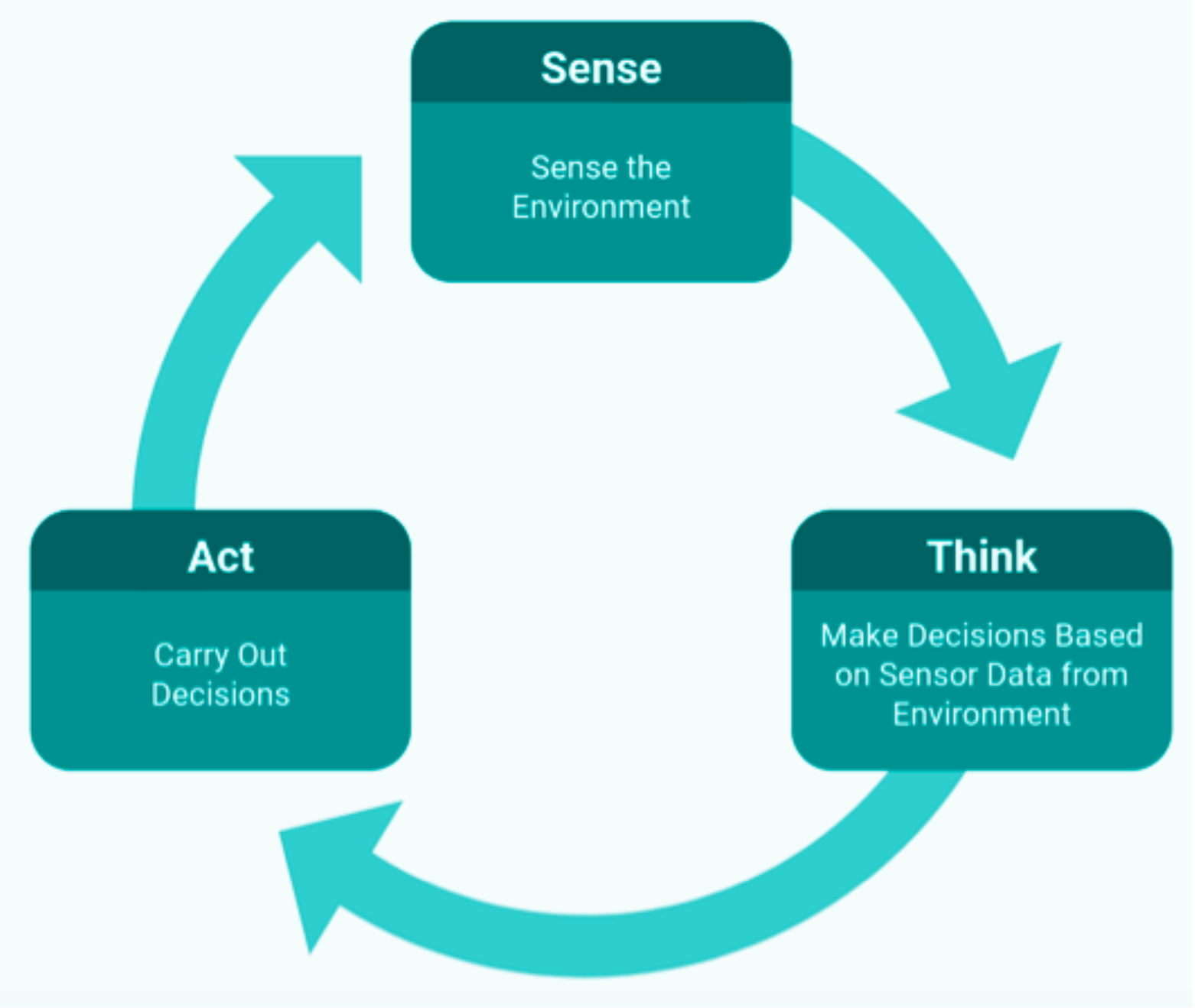
Bu Ünitede, Kod Tabanı, güvenli bir gezici inişi için alanı temizlemeye yardımcı olmak amacıyla Alandaki nesneleri algılamak için Göz Sensörünü kullanacaktır. Öğrencilerin oluşturduğu proje, Kod Tabanındaki Göz Sensörü'nün bir nesnenin varlığını Hissetmesi ve ardından VEXcode GO'nun Göz Sensörünün bir nesneyi algılayıp algılamadığına göre karar vermek için Düşünmesi komutlarını vermesiyle bu döngüyü gerçekleştirir. Daha sonra Code Base Act geçecek ve nesnenin varlığına bağlı olarak sürüşü durduracaktır.
Göz Sensörü Nedir?
Göz Sensörüüç şeyi belirleyebilen bir sensördür: Bir nesnenin varlığı, rengi ve bir nesnenin veya yüzeyin parlaklığı. Bu Ünitede Göz Sensörü, bir cismin tespit edilerek iniş alanından uzaklaştırılmasını sağlamak için kullanılır. Göz Sensörü tarafından bildirilen veriler, öğrencilere robotun 'gördüğü' şeyin görsel bir temsilini sunan Monitör Konsolu'nda görülebilir ve sensörler ile robotun davranışları arasındaki bağlantıyı kurmalarına yardımcı olmak için kullanılabilir. VEXcode GO'da İzleme Konsolu'nun kullanımı hakkında daha fazla bilgi için bu VEX Kitaplığı makalesine bakın.
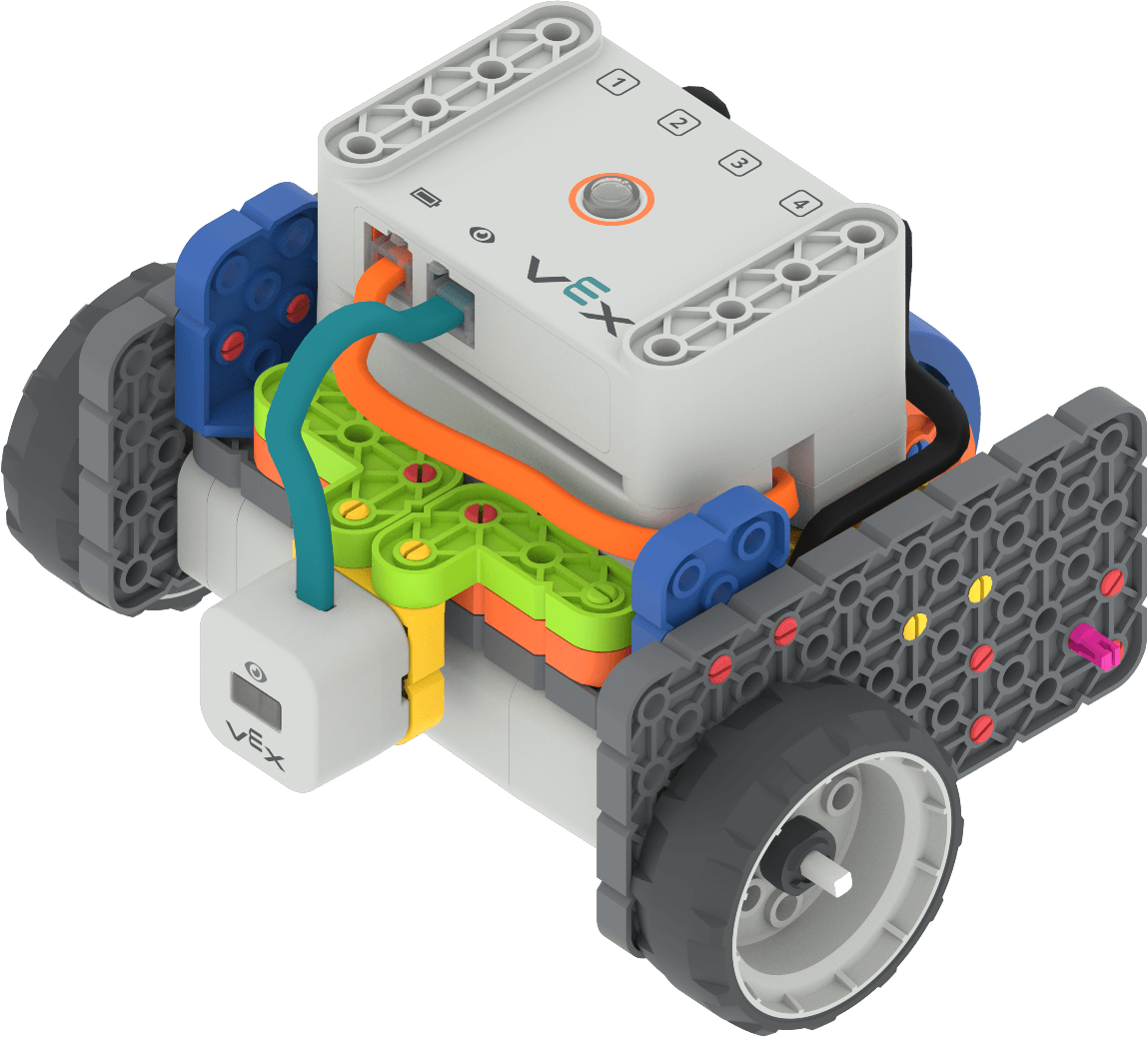
Code Base - Eye Forward yapısındaki Göz Sensörü, aşağıdaki görselde görüldüğü gibi ön tarafta yer alıyor. Göz Sensörü, bir nesnenin varlığını veya yokluğunu, rengini veya parlaklık seviyesini algılamak için kullanılabilir.
Göz Sensörü, nesneleri algılamak için kızılötesi ışık kullanır. Açık renkli nesneler kızılötesi ışığı yansıtır ve Göz Sensörü tarafından daha kolay algılanır. Koyu renkli nesneler kızılötesi ışığı emer ve Göz Sensörü bunları iyi algılamaz. Ünite sırasında, Göz Sensörünün bu nesneleri algılayabilmesini sağlamak için engelleri beyaz veya açık renkli kağıtlarla örtün.
Bu Ünitede, Göz Sensörü, Kod Tabanının yolunda bir nesnenin mevcut olduğunu algılamak için kullanılacaktır. Göz Sensörünün Kod Tabanındaki konumu, yalnızca doğrudan önündeki nesneleri algılayabileceği anlamına gelir. Kod Tabanınızı ve engelleri öğrencilerinize sunarken bunu aklınızda bulundurun; böylece materyaller öğrencileri başarıya hazırlar.
Göz Sensörü ve çalışma şekli hakkında daha fazla bilgi içinVEX GO Göz SensörüVEX Kütüphanesi ile Kodlama makalesine bakın.
VEXcode GO nedir?
VEXcode GO, VEX GO robotlarıyla iletişim kurmak için kullanılan bir kodlama ortamıdır. Öğrenciler, robotlarının hareketlerini kontrol eden VEXcode GO projeleri oluşturmak için sürükle ve bırak arayüzünü kullanırlar. Her bloğun amacı, şekli, rengi ve etiketi gibi görsel ipuçları kullanılarak belirlenebilir. For more information on how to work with VEXcode GO, see the VEXcode GO Section of the VEX Library.
VEXcode GO'daki bloklar, VEXcode GO'da bir proje oluşturmak için kullanılan robot komutlarını temsil eder. Bu Ünite sırasında kullanılan ana blokların listesi aşağıdadır.
| VEXcode GO Blokları | Davranışlar |
|---|---|
 |
{When started} bloğu proje başlatıldığında ekli blok yığınını çalıştırmaya başlar. |
 |
[Drive] bloğu, Aktarma Organlarını sonsuza kadar ileri veya geri hareket ettirir. |
 |
[Turn for] bloğu, Aktarma Organlarını belirli bir mesafe boyunca döndürür. |
 |
[Sonsuza Kadar] bloğu 'C' içerisinde bulunan tüm blokları sonsuza kadar tekrarlar. |
 |
[Wait] bloğu, bir projedeki bir sonraki bloğa geçmeden önce belirli bir süre bekler. |
 |
[Wait until] bloğu, bir sonraki bloğa geçmeden önce içindeki koşulun TRUE değerini bildirmesini bekler. |
 |
<Found object> bloğu Göz Sensörünün bir nesneyi algılayıp algılamadığını bildirir. |
 |
[Sürüşü durdur] bloğu Aktarma Organlarını durdurur. |
 |
[Tampon rengini ayarla] bloğu LED Tamponunun rengini ayarlar. |
[Bekle] bloğu Göz Sensörü ile nasıl çalışır?
Bu Ünitede, öğrenciler Mars gezgininin iniş alanındaki engelleri tespit etmek için Kod Tabanındaki Göz Sensörünü kullanacaklar. Bunu kodlamak için bir projede [Bekle] bloğunu kullanacaklar. [Bekle] bloğu, bir projenin akışını kontrol etmek için bir koşulu tekrar tekrar kontrol eden bir Kontrol bloğudur. [Bekle] bloğundaki koşul doğru olarak bildirilene kadar proje bir sonraki bloğa geçmeyecektir. Bu Ünitede, [Bekle] bloğu<Found object> bloğu ile birlikte koşul olarak kullanılır; böylece Göz Sensörü bir nesne algılayana ve <Found object> bloğunun koşulu doğru olana kadar beklenir ve projedeki bir sonraki bloğa geçilir.
[Bekle] blokları, bu Ünitedeki [Sür] bloğu gibi beklemeyen bloklarla birlikte kullanılabilir, böylece Kod Tabanı, Göz Sensörü bir nesne algılayana kadarileri gidebilir. Robotun bir engele çarpmasını engellemek için kullanılan [Bekle] bloğunu görmek için aşağıdaki animasyonu izleyin.
Robotunuz çalışırken proje akışını gerçek zamanlı olarak görmek için VEXcode GO'daki Öne Çıkan Özelliği izleyin. Projenin başlangıcında, koşul doğru olana kadar [Bekle] bloğunun etrafında yeşil vurgu görünecektir. Yeşil vurgu, beklemeyen blokları (bu durumda [Drive] bloğu) atlamak için görünecektir çünkü bu komutlar hızlı bir şekilde yürütülür.
Bu Ünitede, öğrenciler projelerinde Laboratuvar etkinliklerini ve zorluklarını tamamlamak için [Bekle] bloğu gibi bekleme blokları ve [Sürüş] bloğu gibi beklemeyen blokların bir kombinasyonunu kullanacaklar. VEXcode GO'daki bekleyen ve beklemeyen bloklar hakkında daha fazla bilgi edinmek için bu VEX Kütüphanesi makalesini okuyun.
Bu Ünitedeki Açık Uçlu Mücadeleye Hazırlık
Bu ünitede öğrencilerden daha önce öğrendiklerini kullanarak bir zorluğu çözmek için bir proje oluşturmaları istenecektir. Öğrencilere düzenli olarak problem çözme konusunda meydan okumak ve öğrendikleri becerileri yeni bir şekilde uygulamak önemli olduğundan, sizleri öğrencilerinizi meydan okumaya ve bu stratejileri kullanarak dayanıklılıklarını geliştirmeye ve bu zorlukta onlara rehberlik etmeye teşvik ediyoruz. Öğrencilerin projelerini denerken yardımcı olacak birkaç öneri:
Çözümü vermeden geri bildirim verin -Bir zorlukla başa çıkarken hata yapmak beklenir ve teşvik edilir. “Öğrenmedeki hatalar fırsatlar yaratabilir ve bağlantıları fark etmeye yardımcı olabilir.”1 Öğrencilerinizle tanıdık bir problem çözme süreci oluşturmak, bir problemi nasıl belirleyeceklerini ve hata yaptıklarında nasıl ilerleyeceklerini öğrenmelerine yardımcı olabilir, böylece kesintiyi ve hayal kırıklığını en aza indirir. Öğrencilerinizin projelerinde sorun gidermelerine ve kendi çözümlerini üretmelerine yardımcı olmak için aşağıdaki problem çözme döngüsünü kullanmayı deneyin.
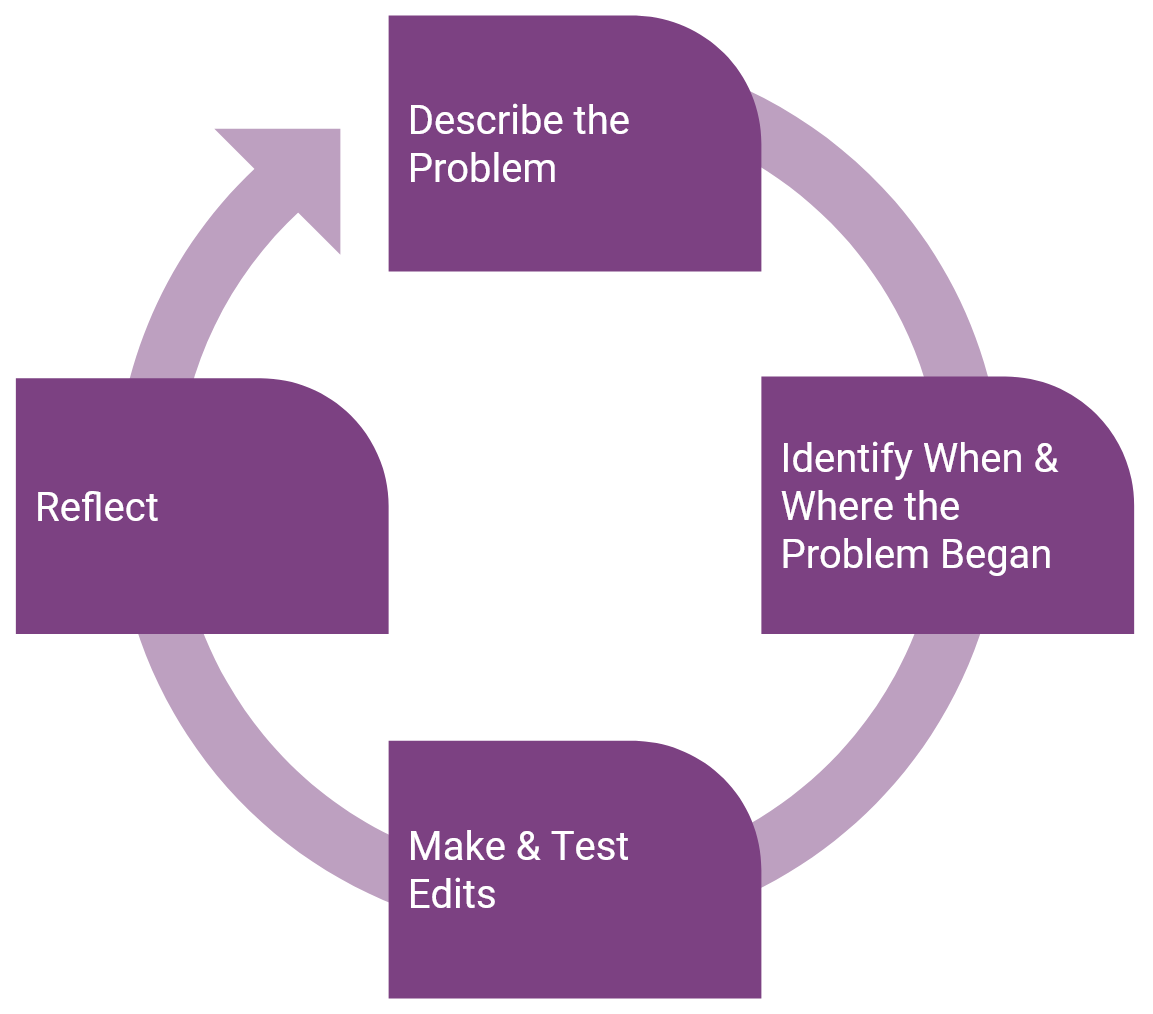
- Sorunu Açıklayın
- Öğrenciden sorunun ne olduğunu açıklamasını isteyin. Öğrenciler hatayı paylaşılan hedefle veya karşılaşılan zorlukla ilişkilendirebilmelidir.
- Projenizde Kod Tabanı nasıl ilerliyor? Robotun nasıl olmalı?
- Öğrenciden sorunun ne olduğunu açıklamasını isteyin. Öğrenciler hatayı paylaşılan hedefle veya karşılaşılan zorlukla ilişkilendirebilmelidir.
- Sorunun Ne Zaman ve Nerede Başladığını Belirleyin
- Öğrenciye sorunu ilk ne zaman fark ettiğini sorun.
- Projenin hangi kısmı yürütülüyordu?
- Öğrenciler projede hatanın nerede olduğunu belirlemede zorluk çekiyorlarsa, onları VEXcode GO'daki Proje Adımlama özelliğini kullanmaya teşvik edin. Proje Adımlama özelliğiyle sağlanan görsel ipuçları, öğrencilerin blokların tek tek yürütüldüğünü görme olanağı sağlayarak projelerinde sorun gidermelerine yardımcı olmak için kullanılabilir. Bu, onlara hangi blokların hataya neden olabileceği konusunda daha iyi bir görsel sunacak ve böylece hata ayıklama daha hedef odaklı ve verimli bir süreç haline gelebilecektir. Proje Adımlama özelliğinin nasıl kullanılacağı hakkında daha fazla bilgi için VEXcode GO VEX Kütüphanesinde Bir Projede Adımlama Makalesine bakın.
- Öğrenciye sorunu ilk ne zaman fark ettiğini sorun.
- & Test Düzenlemesi Yapın
- Öğrenciler bir hata bulduklarında projelerinde düzeltmeler yapmalıdırlar. Öğrenciler yaptıkları her düzenlemeyle projeyi test edebilirler. Proje başarılı olursa, problem çözme döngüsünün bir sonraki adımına geçilebilir. Eğer proje başarılı olmazsa, sürecin başına geri dönüp tekrar deneyebilirler.
- Yansıtmak
- Öğrencilerden süreç boyunca yaptıkları ve üstesinden geldikleri hataları düşünmelerini isteyin.
- Hata neydi? Bu hatadan ne öğrendiniz? Bir dahaki sefere Kod Tabanını kodlarken size nasıl yardımcı olabilir?
- Öğrencilerin hatalarını ve süreçten öğrendiklerini fark etmelerini teşvik edin, bu sayede büyüme odaklı bir zihniyetin oluşmasına yardımcı olun. Büyüme zihniyetine güçlü bir vurgu, öğrencilerin ne zaman ve nasıl ısrarcı olacaklarını ve ayrıca ne zaman yardım isteyeceklerini öğrenmelerine yardımcı olabilir2Öğrenciler kendi süreçlerini yeni bir öğrenmenin öncüsü olarak görebilirlerse, buradaki adımları hem kendi öğrenmelerini hem de sınıf arkadaşlarının öğrenmesini ilerletmek için kullanabilirler. Öğrenciler bu sorunlarla karşılaştıklarında ve hatalarını düşündüklerinde, hatalarını ve süreçlerini diğer öğrencilerle paylaşmaları için onları teşvik edin. Bu şekilde öğrenciler "birbirleri için öğrenme kaynakları" haline gelebilirler.3
- Öğrencilerden süreç boyunca yaptıkları ve üstesinden geldikleri hataları düşünmelerini isteyin.
İniş Alanını Temizle (Laboratuvar 2), öğrencilerinizin bir zorluğu çözmek için azim göstermelerini isteyen açık uçlu bir keşif olarak tasarlanmıştır. Bu Laboratuvarda, [Sonsuza Kadar] bloğu ile döngüleri tanıtacağız ve öğrencilerden projelerinde döngüleri kullanarak Kod Tabanının iniş alanındaki (GO Field) tüm engelleri tespit etmesini ve bunlara ulaşmasını deneyerek görmelerini isteyeceğiz. Öğrencileriniz için bir projede döngü kullanımı yeni bir şeyse, döngüleri etkili bir şekilde kullanabilmeleri için projelerinde birkaç yineleme yapmaları gerekebilir. Öğrencileri deneme-yanılma sürecine hazırlamak ve projelerinde sorun gidermelerine yardımcı olmak için bu bölümde özetlenen önerileri kullanın. Oyun Bölüm 1 ve 2'nin Kolaylaştırma bölümü, öğrencileri Lab 2 mücadelesinde yönlendirmek için ek öğretim destekleri içerir. Bu Laboratuvarda gerekli olan problem çözme ve deneme-yanılma desteğini nasıl sağlayacağınıza dair bir planınız olması, öğrencilerinizin bireysel ihtiyaçlarını karşılamanıza yardımcı olabilir.
Öğrencilerin STEM Laboratuvarlarında çalışırken direnç ve gelişim odaklı bir zihniyet oluşturmalarına etkili geri bildirimin nasıl yardımcı olabileceği hakkında daha fazla bilgi için STEM Laboratuvarlarında Dayanıklılık Oluşturma VEX Kütüphanesi makalesi bakın.
1 Hattie, John ve Shirley Clarke. Görünür Öğrenme: Geri Bildirim. Routledge, Taylor & Francis Group, 2019.
2 Aynı.
3 Aynı eser, s. 121