
Arka plan
Bu kodlama ünitesinde öğrenciler, iş yerinde kodlama robotları için gerçek zorlukları çözmek amacıyla VEXcode GO ve Code Base robotuyla nasıl çalışacaklarını öğrenecekler. Öğrenciler, dört gerçek dünya senaryosuna dayalı olarak Code Base robotuyla VEXcode GO projelerini nasıl planlayacaklarını, oluşturacaklarını ve başlatacaklarını öğrenecekler.
Robotlar Ne Tür İşler Yapar?
Robotlar, insanların yapamayacağı kadar kirli, sıkıcı veya tehlikeli işleri yapabilir. Bu işlerin birçoğunun maaşı da iyi değil. Örneğin insanlar yangın söndürme veya okyanusun derinliklerine dalma gibi görevleri yaparken hayatlarını riske atıyorlar. Robotlar bu tür ortamlarda varlığını sürdürebilecek donanıma sahip olduklarından daha uygun ve güvenli bir tercihtir. Endüstriler, insanları korumak için işyerlerinde bu kirli, sıkıcı veya tehlikeli işleri yapmak üzere robotları kullanıyor ve aynı zamanda insan kaynaklarının daha karmaşık veya etkileşimli süreçler üzerinde çalışmasını sağlıyor. Robotlar bu kirli, tehlikeli ve sıkıcı işleri üstlenirse, insanların hâlâ yapacak çok işi var. Teknolojideki gelişmeler endüstri tarihi boyunca değişime yol açmıştır. Robotlar için de durum farklı değil.

Bu ünitedeki her ders, robotların çeşitli endüstrilerde kirli, tehlikeli ve sıkıcı işler yaptığı gerçek dünya senaryolarını inceler. Öğrenciler, kirli, sıkıcı ve tehlikeli görevleri yerine getirecek robotların nasıl kodlanacağı gibi gerçek hayattaki zorluklara çözümler üreterek yenilikçi problem çözücüler olabilirler. Öğrenciler VEX GO Kitlerini kullanırken, Code Base robotunun VEXcode GO kullanarak nasıl hareket edebileceğini analiz edecek ve bu bilgiyi Code Base robotu kullanılarak çözülebilecek farklı işler, senaryolar veya sorunlar üzerinde beyin fırtınası yapmak için kullanacaklar.
Kirli İşler
Kirli işler, insan sağlığını etkileyebilecek sağlıksız veya tehlikeli işlerdir. Robotlar bu olumsuz işleri yapabilir ve insanların sağlıksız koşullara maruz kalmasını sınırlayabilir. Kirli tünel ortamında çalışan bir robotun örneğini görmek için aşağıdaki videoyu izleyin.
Maden arama ve kanalizasyon keşfi gibi kirli işlerde robotlar kullanılmaya başlandı. Kanalizasyon borusunda bir sorun olduğunda, bir ekip boruyu kapatıyor, boruya ulaşmak için kazı yapıyor ve ardından altyapıyı onarıyor. Ancak bir robot, sorunlar ortaya çıkmadan önce boruları temizleyebilir, haritalayabilir ve inceleyebilir.
Sıkıcı İşler
Tekrarlanan işlevler gerektiren, insan düşüncesine pek yer vermeyen işler sıkıcı kabul edilir. Bunlar çoğunlukla tek amacı verimlilik ve çıktı olan süreçleri içerir. Robotlar, sıkıcı işleri kolaylaştırmak için 7/24 çalışabilirler; bu da insan sermayesinin çeşitlilik ve eleştirel düşünme gerektiren görevler için serbest kalmasını sağlar.

Örneğin, e-ticaretin büyümesiyle birlikte, lojistik merkezlerine olan ihtiyaç da artıyor. Robotlar siparişten teslimata kadar geçen süreyi artırıyor, hataları azaltıyor ve insan işçilerin yükünü en aza indiriyor.
Tehlikeli İşler
Tehlikeli işler insanları zararlı durumlara sokar. Bu işlerde yaralanmaları önlemek için robotlar kullanılabilir. Robotlar bombaları etkisiz hale getirebilir, uzak gezegenleri dolaşabilir, dengesiz yapıları inceleyebilir ve yangınlarla mücadeleye yardımcı olabilir. Robotlar insanları denklemden tamamen çıkarmasa da, uzaktan programlanabilir veya kontrol edilebilirler ve böylece çalışanları en tehlikeli durumlardan uzak tutabilirler.

Robotlar itfaiyecilerin yanan binaları değerlendirmesine yardımcı olabilir. SmokeBot, itfaiyecilerin daha sonra yanan bir binanın içinde yollarını bulmalarına yardımcı olacak iç mekan haritaları oluşturuyor. Thermite Robot'un dakikada 1.893 litre (~500 galon) su pompalayabilen bir hortumu var. Termit Robotu, monte edilmiş kameralar sayesinde çeyrek mil öteden kontrol edilerek son derece tehlikeli yangınlara girebiliyor.
Aktarma Organları Nedir?
Bir aktarma organı, bir robotun tekerlekler veya diğer yöntemler kullanarak ileri, geri, sola veya sağa hareket etmesini sağlar.
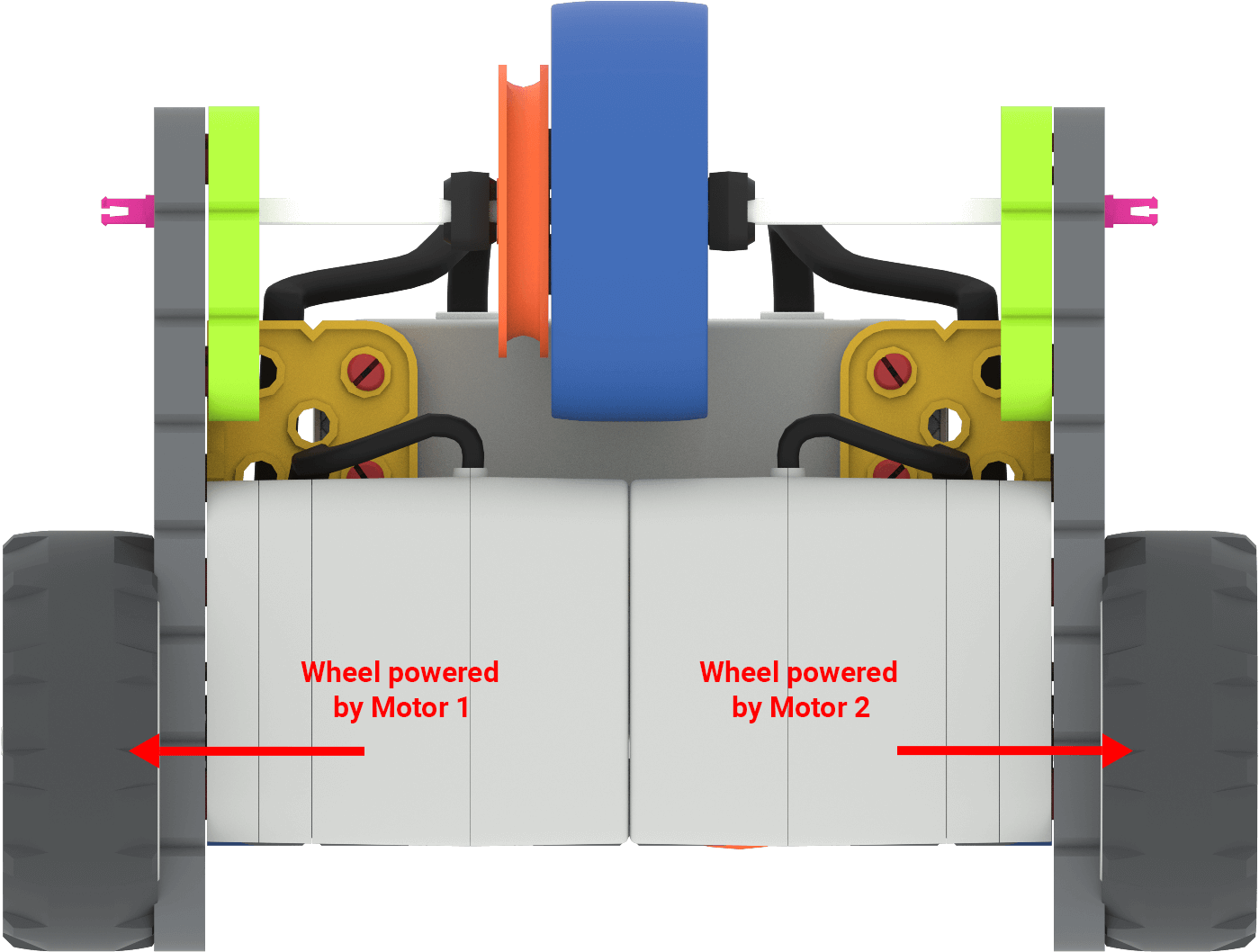
Code Base robotunun 2 motorlu bir aktarma organı vardır çünkü güç verilen iki motor (biri solda, biri sağda) vardır. Code Base robotunda dört tekerlek olmasına rağmen, bunlardan sadece ikisi motorla çalışıyor. Mavi Tekerlekler, Code Base robotunun devrilmesini engelleyerek dengede kalmasını sağlıyor. Kod Tabanının sadece iki tekerlekle hareket etmeye çalıştığını hayal edebiliyor musunuz? İleri veya geri hareket ettiğinde büyük ihtimalle devrilecektir.
Kod Tabanlı Robot Aktarma Organlarını Kullanarak Nasıl Döner?
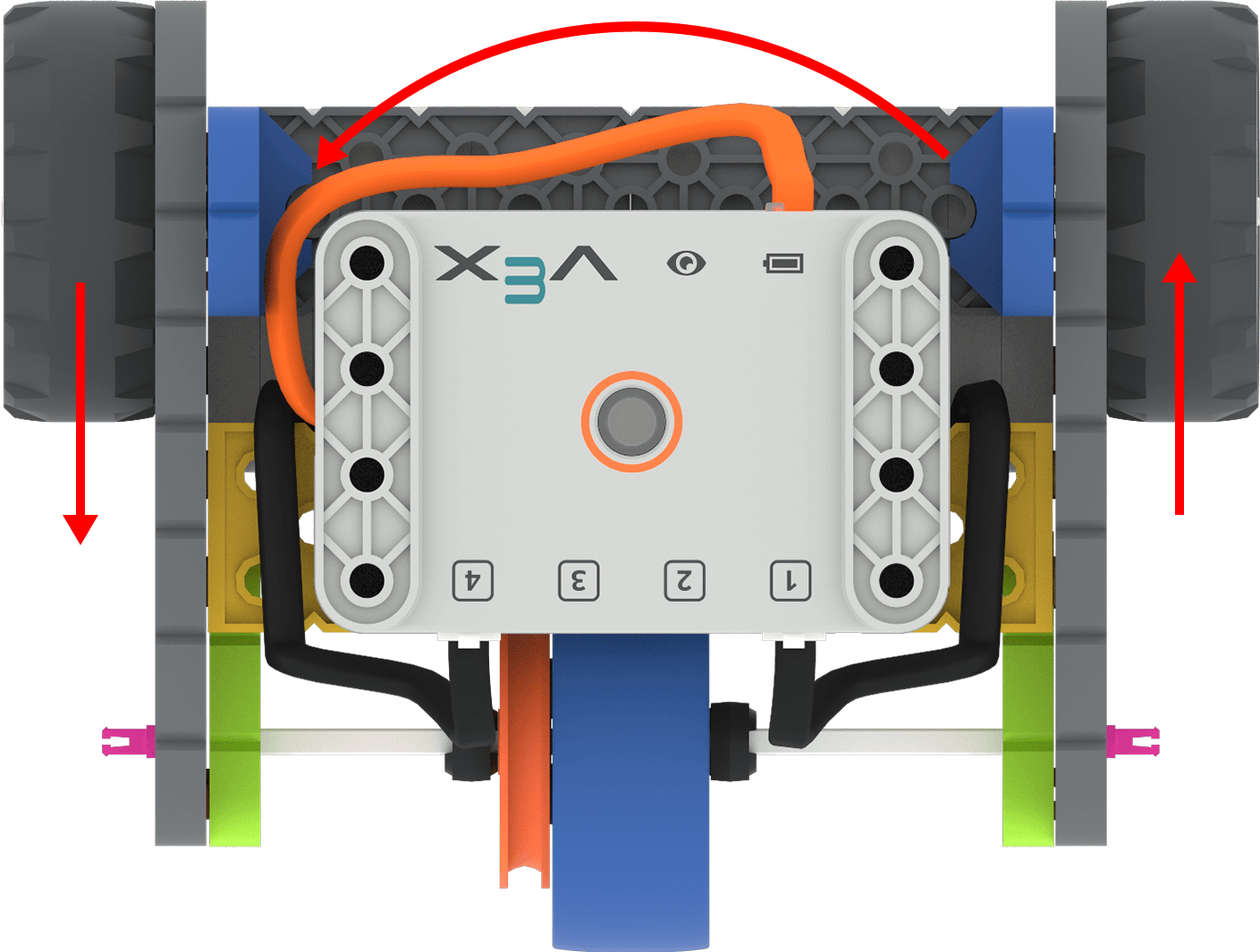
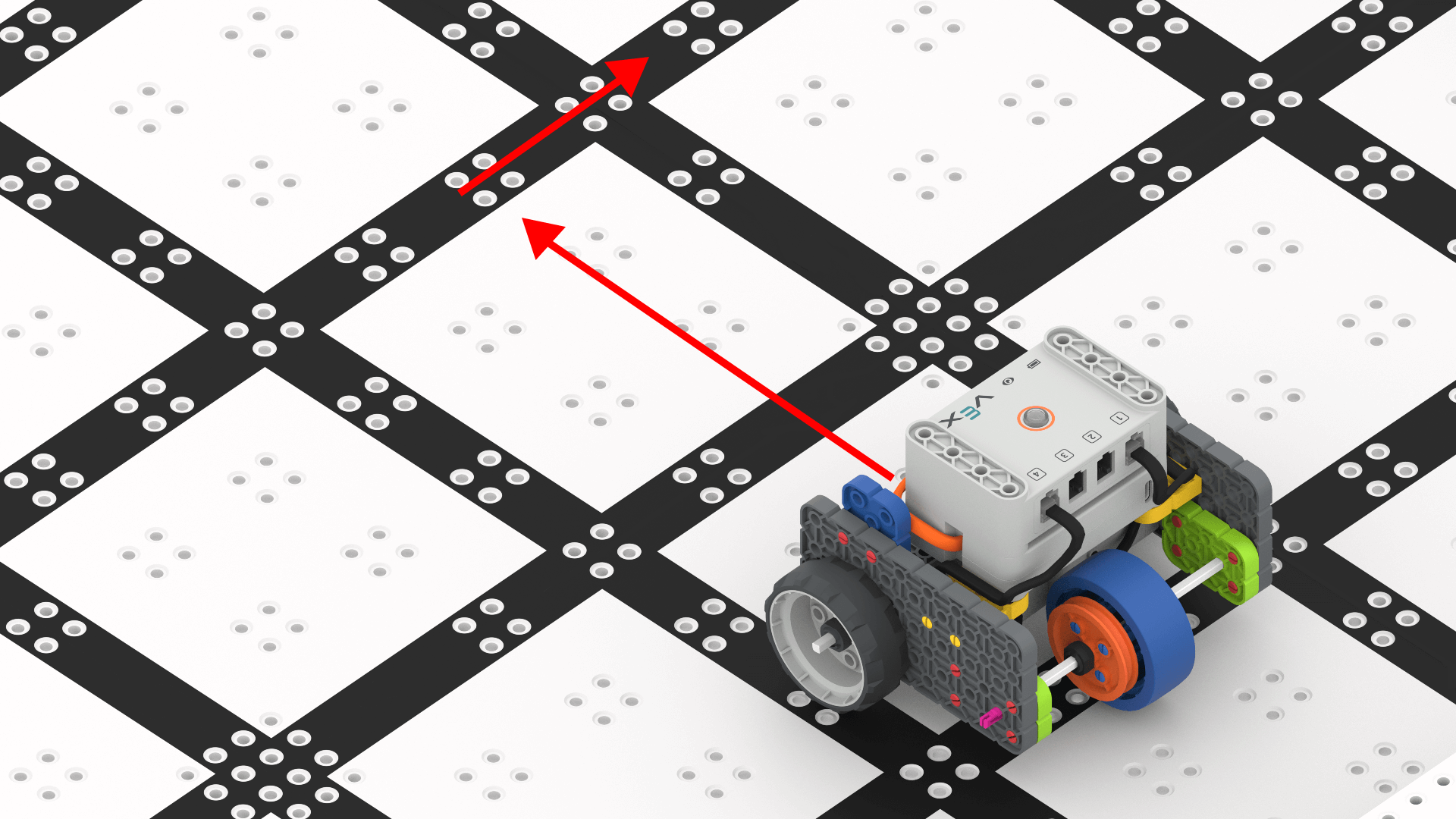
Code Base robotu tekerlekleri zıt yönlerde döndürerek dönüşler yapıyor. sola dönüş yapmak için Code Base robotunun sol ön tekerleği geriye doğru, sağ ön tekerleği ise ileriye doğru dönecektir.
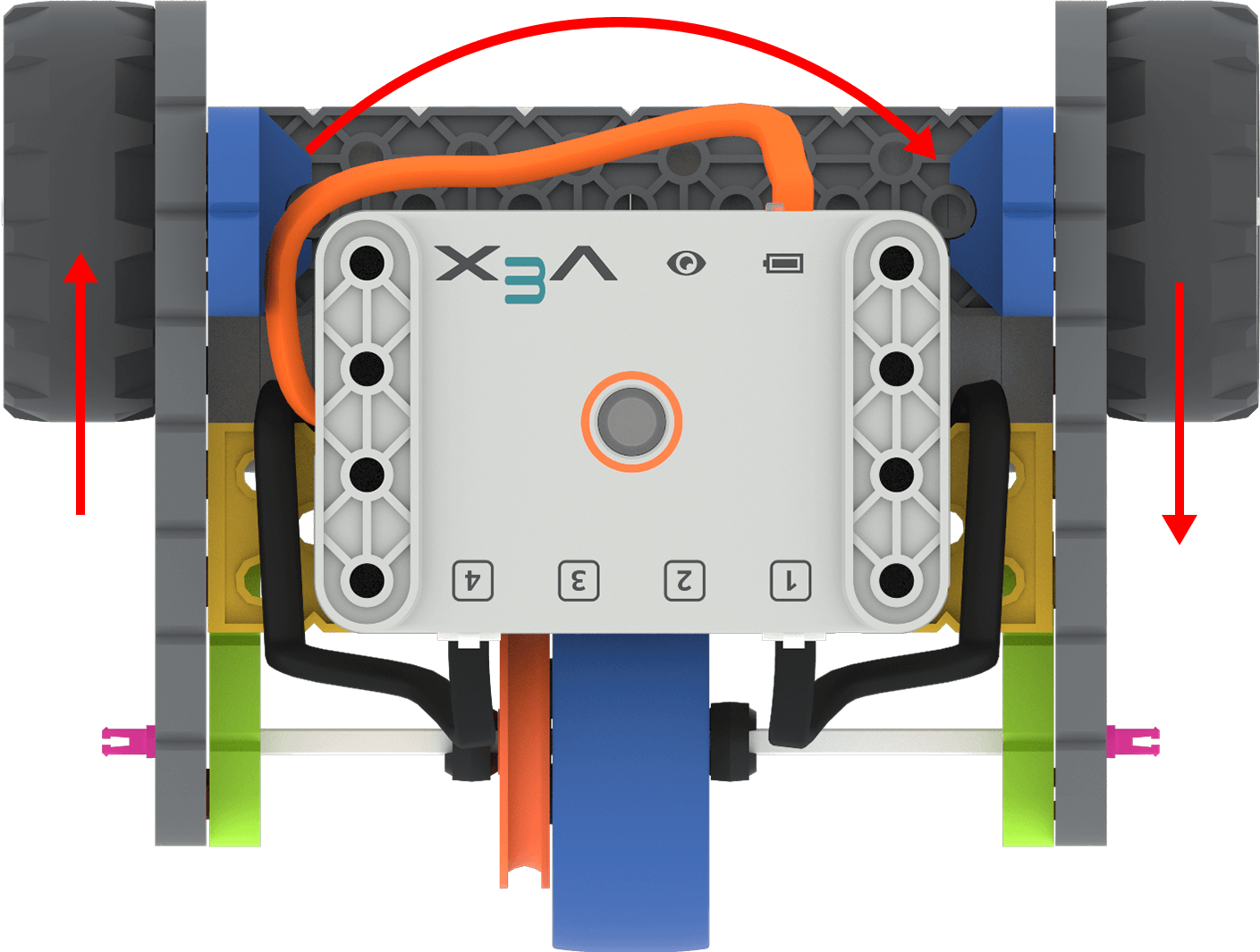
sağa dönüş yapmak için Code Base robotunun sol ön tekerleği ileri doğru dönerken, sağ ön tekerleği geriye doğru dönecektir.
VEXcode GO nedir?
VEXcode GO, VEX GO Robotları ile iletişim kurmak için kullanılan bir kodlama ortamıdır. Öğrenciler, robotlarının hareketlerini kontrol eden VEXcode projeleri oluşturmak için sürükle ve bırak arayüzünü kullanırlar. Her bloğun amacı, ,ve etiketi gibi görsel ipuçları kullanılarak belirlenebilir.
Bu ünitede aşağıdaki VEXcode blokları tanıtılacaktır:
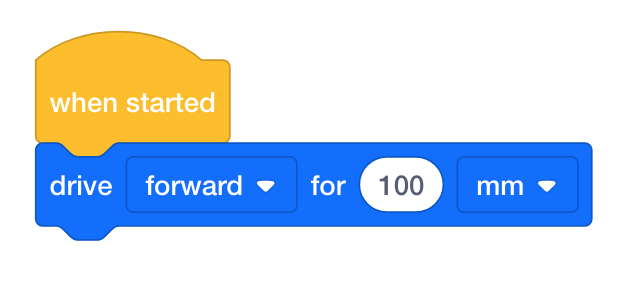
{When started} - Proje başlatıldığında ekli blok yığınını başlatır.
 |
 |
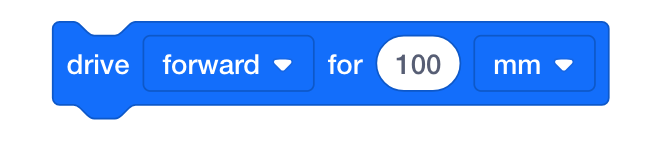
[Sürüş] - Aktarma Organlarını belirli bir mesafe boyunca ileri veya geri hareket ettirir. Aktarma Organlarının hangi yöne hareket edeceğini seçin ve oval alana bir değer girerek ne kadar uzağa hareket edeceğini ayarlayın.
 |
 |
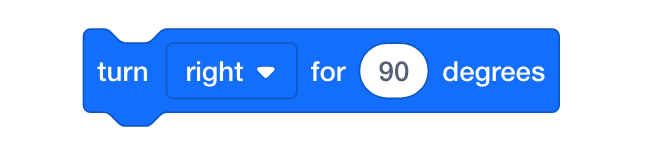
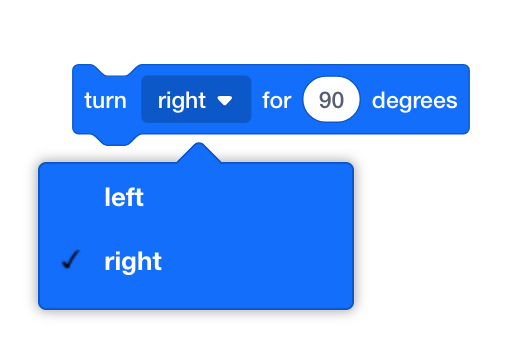
[Döndür] - Aktarma Organlarını belirli bir derece kadar sola veya sağa döndürür. Aktarma Organlarının döneceği yönü seçin ve oval alana bir dizi derece girerek ne kadar hareket edeceğini ayarlayın.
 |
 |
Programlamada Ayrıştırma ve Sıralama Nedir?
Bir robota tam ve kesin bir şekilde nasıl hareket edeceğini söyleyebilmek için hem ayrıştırmaya hem de sıralamaya ihtiyaç vardır. Öncelikle, bir zorlukta nasıl yol alınacağı gibi sorun, daha küçük parçalara ve davranışlara ayrıştırılacak. Daha sonra bu davranışlar belirlendikten sonra bunların doğru sıraya konulması gerekir. Bu önemlidir, çünkü robot yalnızca programlandığı şekilde hareket edecektir.
Ayrışma
Ayrıştırma karmaşık bir sorunu daha yönetilebilir ve anlaşılması daha kolay davranışlara ayırmayı içerir. Sorunu daha küçük parçalara bölmek, her bir parçanın daha detaylı incelenebilmesi ve daha kolay çözülebilmesi anlamına gelir. Örneğin, bir öğrenci robotunun kare şeklinde hareket etmesini istiyorsa, bunu daha küçük komutlara bölmesi gerekecektir. Öğrencilerin parçalama sürecini geliştirmeleri önemlidir, çünkü ilk başta komutları daha küçük bileşenlere ayırmayabilirler:
| Kare dökümünde hareket et 1 | Kare dökümüyle hareket et 2 | Karesel bir dağılımla hareket et 3 |
|---|---|---|
|
|
|
Dizileme
Sıralama , davranışların gerçekleştirildiği belirli sıradır. Bir eylem veya olay, bir dizideki bir sonraki sıralı eyleme yol açar. Öğrencilerin robotlarını bir görevi doğru şekilde yerine getirecek şekilde programlayabilmeleri için sıralama önemlidir.
Öğrenciler, robotların gerçekleştirdiği gerçek işleri taklit eden çeşitli görevleri tamamlamak üzere Kod Tabanlı robotlarını programlayacaklar. Zorlukların üstesinden gelmek için Kod Tabanlı robotlarının doğru sırayla ileri, geri, sola ve sağa hareket edebilmesi için programlarındaki komutları sıralamaları gerekecektir.
- İleriye doğru hareket et
- Sağa dönün
- İleriye doğru hareket et
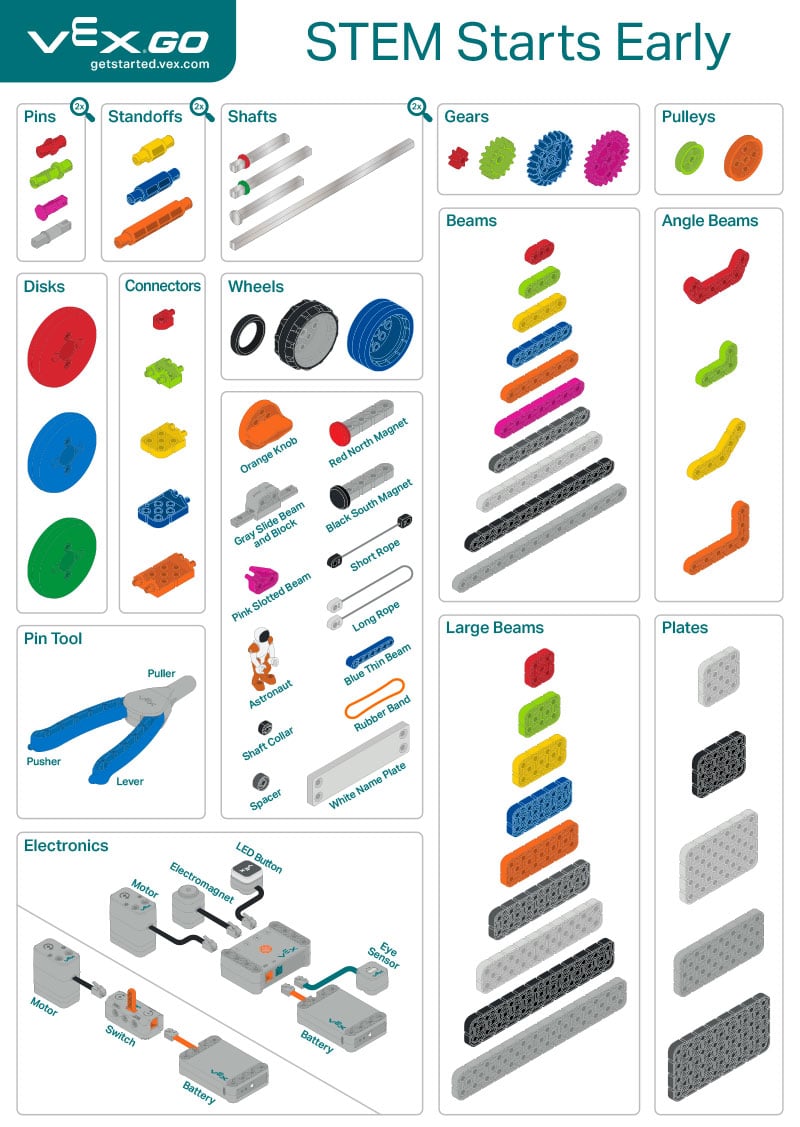
VEX GO Parçaları
Aşağıdaki VEX GO parçaları, Kod Tabanlı robot yapısının temel parçalarıdır. VEX GO Poster, tüm VEX GO parçalarını gösterir ve bunları bir yapıdaki işlevlerine göre düzenler. More information about the VEX GO pieces can be found in the Pieces in the VEX GO Kit VEX Library article.
Elektronik
VEX GO yapı fonksiyonlarını güçlendirmek ve kontrol etmek için elektronik bileşenler kullanılır.
Battery elektronik aksam içeren her VEX GO yapısı için olmazsa olmazdır. Pil, VEX GO elektronik bileşenlerine güç sağlar.
Brain VEXcode GO projesi tarafından başlatılan herhangi bir VEX GO yapısı için gereklidir. Beyin, kullanıcı projelerini yürütür ve kendisine bağlı cihazları kontrol eder.
Motor enerjiyi bir yapıda kullanılabilecek harekete dönüştürür. Motor, Beyne bağlanıp VEXcode GO projesi ile kontrol edilebilir.