
Testing, Collecting Data, and Informing Decisions
Where will you position the bottle as cargo?
In the Claw Arm Challenge you will be transporting a bottle using the V5 Clawbot. That would be easy but you need to race your robot with its claw arm raised to different heights. So in order to keep your robot from falling over, you will need to decide the best placement of the bottle. Test your assumptions and run some trials with your V5 Clawbot.
Start by investigating the following questions:
- Where is the V5 Clawbot's center of gravity (CoG)?
- Does its CoG move when the claw arm is raised? If so, in which direction?
- How fast can the V5 Clawbot accelerate and remaining stable while its arm is lowered?
- How fast can the V5 Clawbot accelerate and remain stable while its arm is raised ?
- Does the position of the bottle affect the V5 Clawbot's stability?
- Who should be the driver for each of the three rounds?
Logging data
Data logging helps you collect the information you need to make a sound, justified decision.
Using the example table below, record your results from at least 9 trial runs. Write the results of each trial in a new row. Fill out each column as follows:
- Driver: the name of the teammate who drove the robot
- Bottle Position: the location you placed the bottle on the robot
- Arm Height: the height the robot's arm was raised
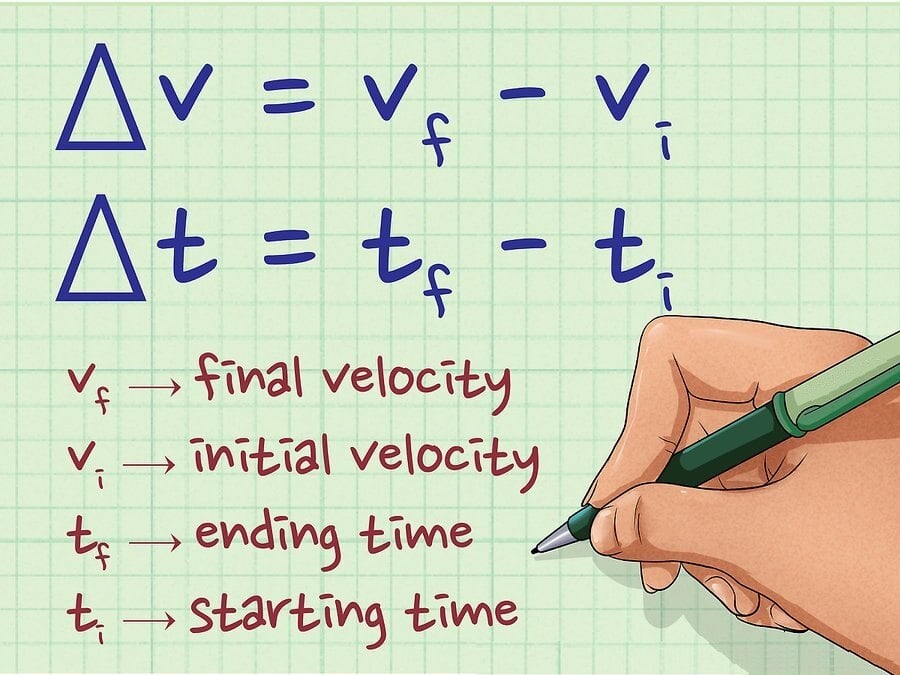
- Acceleration: the measure of how quickly you accelerated the robot at the start
- Acceleration = change in velocity / change in time
- Stayed Upright: yes or no
After you have recorded each trial run, use the results to choose a position for the bottle that lets you accelerate quickly and remain stable.
