
Exploration
Now you will create a VEXcode V5 project to have Moby pick up Rings from the Field and place them in a Mobile Goal. Then Moby will pick up and move the Mobile Goal to the Alliance Home Zone to score.
Break down the task
Before you begin coding, it is important to understand the behaviors needed so Moby can pick up Rings from the Field and place them in a Neutral Mobile Goal Base, and pick up and score the Mobile Goal.
Watch this video to break down the behaviors of the robot needed to complete the task.
Build the project
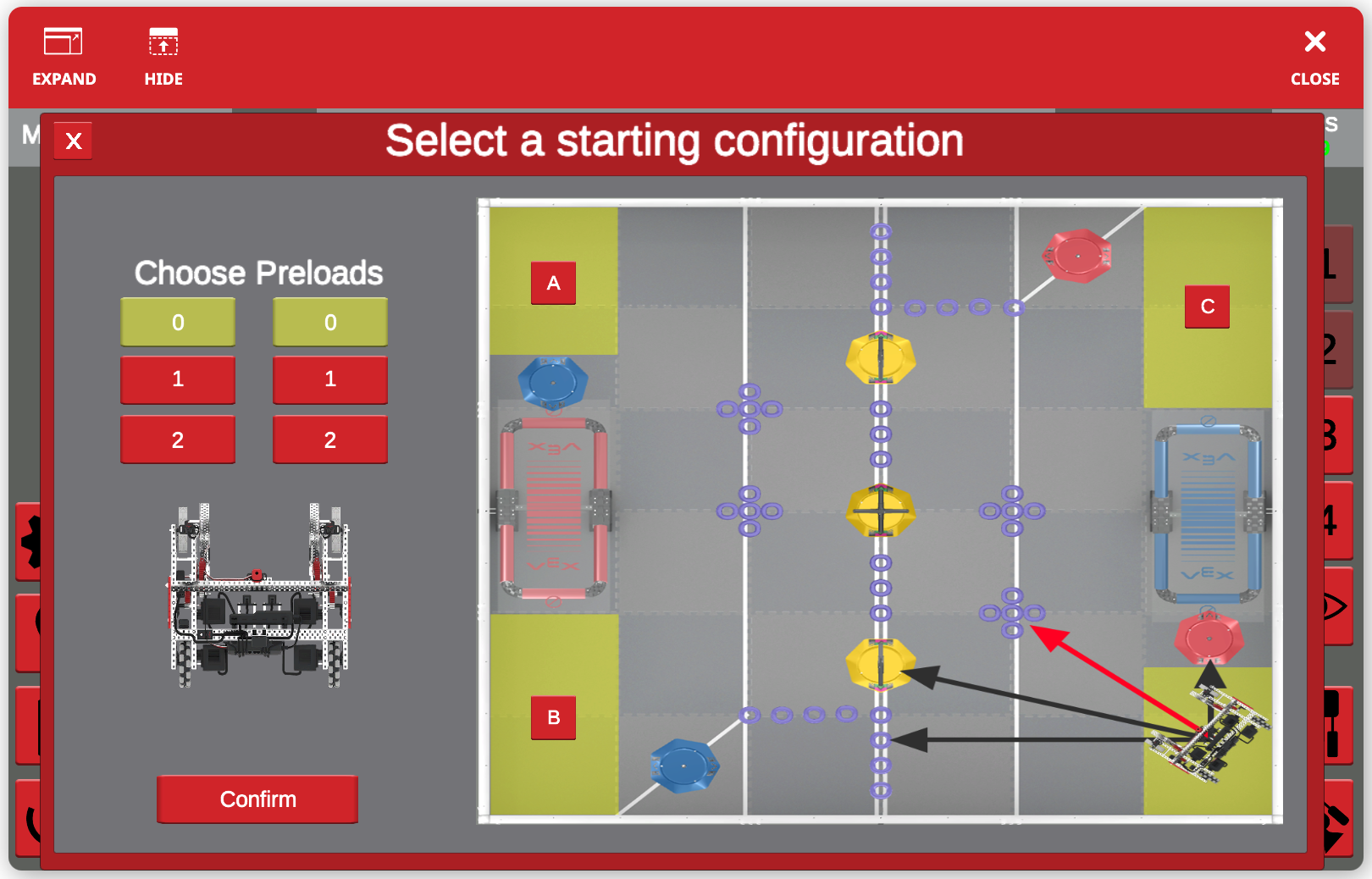
First, launch web-based VEXcode V5, and set your starting configuration. Then add blocks to build the project yourself, or open the example project below.
Set your starting configuration to position D, facing Northwest (towards the Ring cluster), with zero Preload Rings.
For steps on how to select Moby's starting location, see this Knowledge Base article.
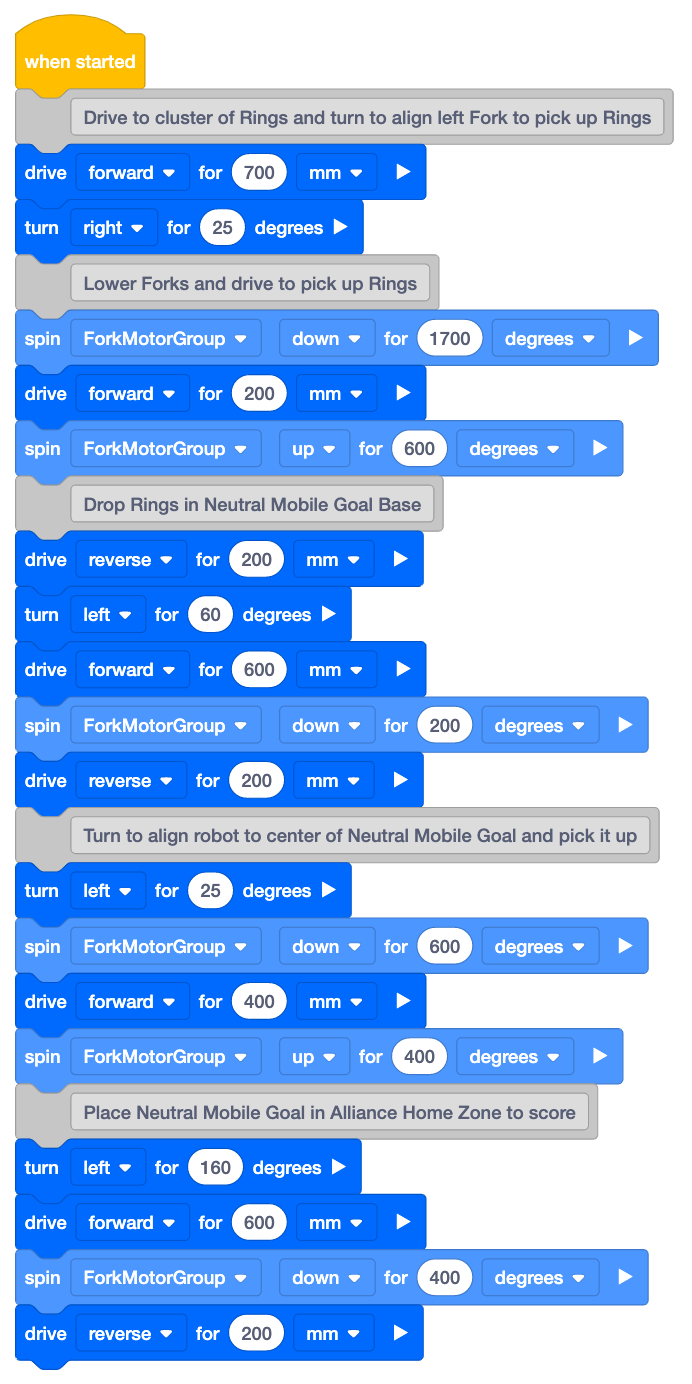
Build the project shown in this image.
Select the image to enlarge.
Or, open the 'Pick Up and Score Rings' example project.
View this article from the Knowledge Base for information on how to open an example project.
Test and observe the project
Now that you have built the project, you will now test it and observe Moby's behaviors as it moves and scores on the Field.
Watch this video to test the project and observe how the robot moves.
Note: If you are experiencing trouble in VRC Virtual Skills, you can use the Feedback button for support.
Select Next > to begin the mini-challenge.