
صعودا وهبوطا
6 教训
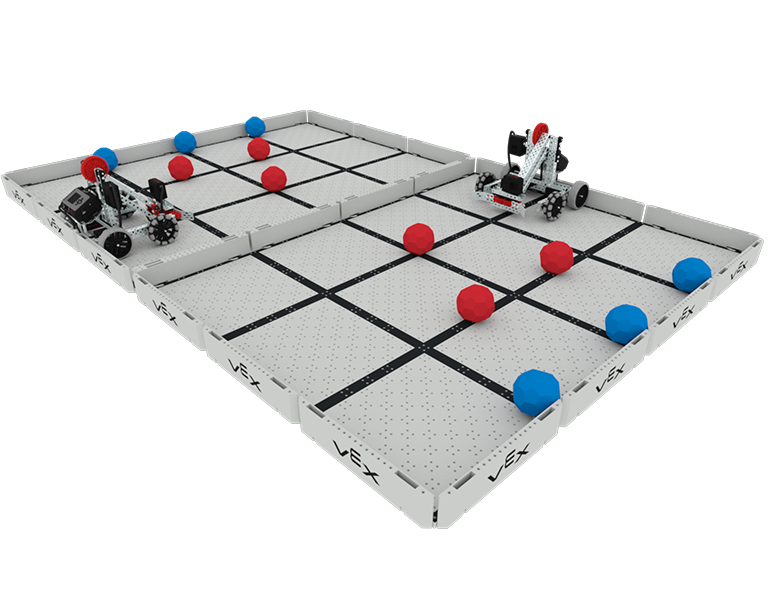
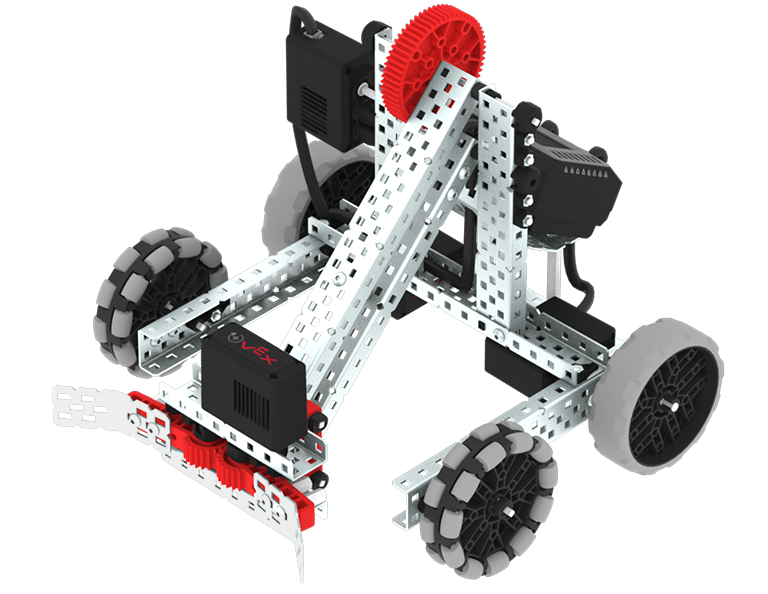
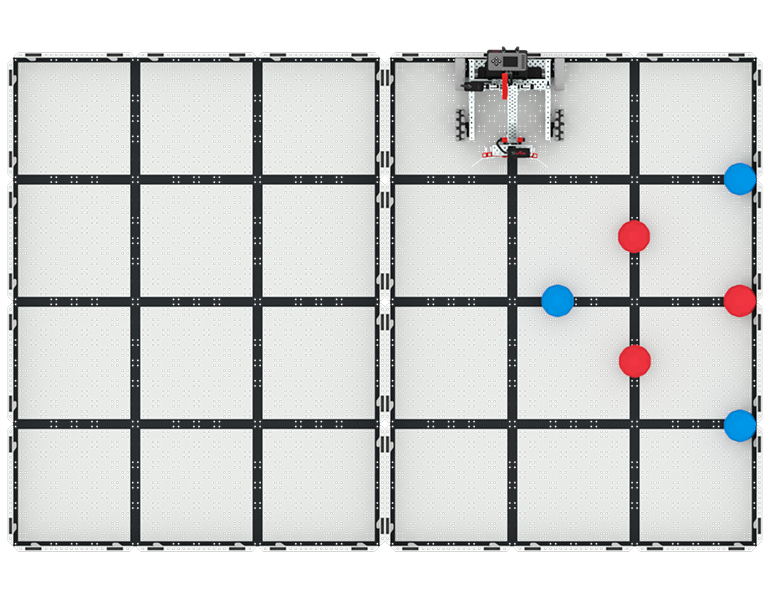
في هذه الوحدة، ستستكشف كيفية تصميم Clawbot لجمع كرات بوكي والتقاطها ونقلها من جانب واحد من الملعب إلى الجانب الآخر، في مسابقة Up and Over!
访问教师门户网站,获取有关 Up and Over 课程内容和便利性的教师支持材料和视频。
Lesson 1: Introduction
In this Lesson, you will be introduced to the Up and Over competition, set up the Battery and Controller, get ready to code, and build the Clawbot.
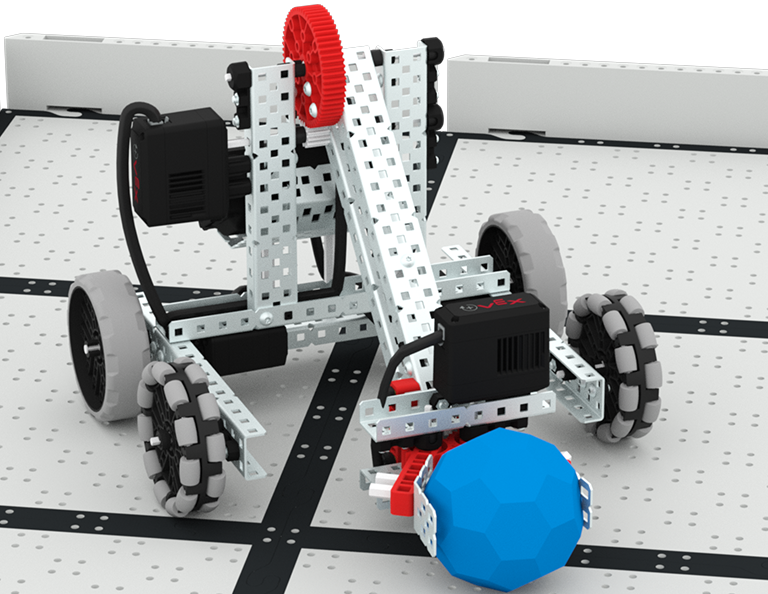
Lesson 2: Claw Design
In this Lesson, you will learn what a claw is, how an effective claw works, and how scouting can benefit your team's designs and strategy. Then, you will apply what you have learned in the Grab and Go challenge.
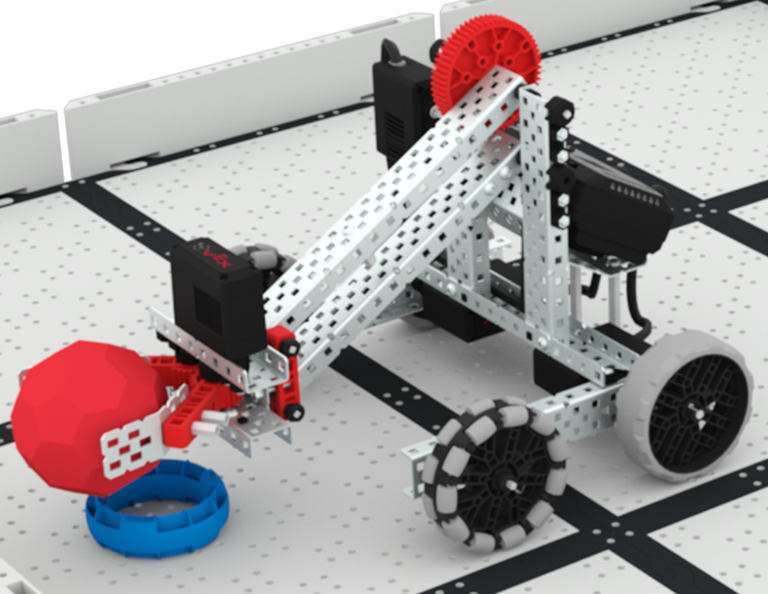
Lesson 3: Arm Designs
In this Lesson, you will learn about different elements of robotic arms including how they work, and what makes an effective arm design. Then, you will design and build an arm for your robot to stack Buckyballs in rings for the Stacked Up challenge.
Lesson 4: Motor Groups
In this Lesson, you will learn what motor groups are, how they can be helpful, and how to configure motor groups in VEXcode EXP in order to iterate on your robot to complete the Up and Over challenge.
Lesson 5: Up and Over Competition
In this Lesson, you will apply your learning from the previous Lessons to compete in the Up and Over competition!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.